TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025120042
公報種別
公開特許公報(A)
公開日
2025-08-15
出願番号
2024015243
出願日
2024-02-02
発明の名称
表示制御装置、ヘッドアップディスプレイ装置、表示制御方法、及び車載システム
出願人
日本精機株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01C
21/36 20060101AFI20250807BHJP(測定;試験)
要約
【課題】指示シンボルを先行表示するにあたり、指示シンボルが示す交差点等所定の実空間位置での案内方向の知覚を容易にする。
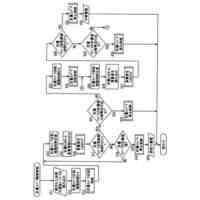
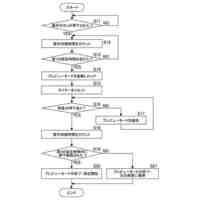
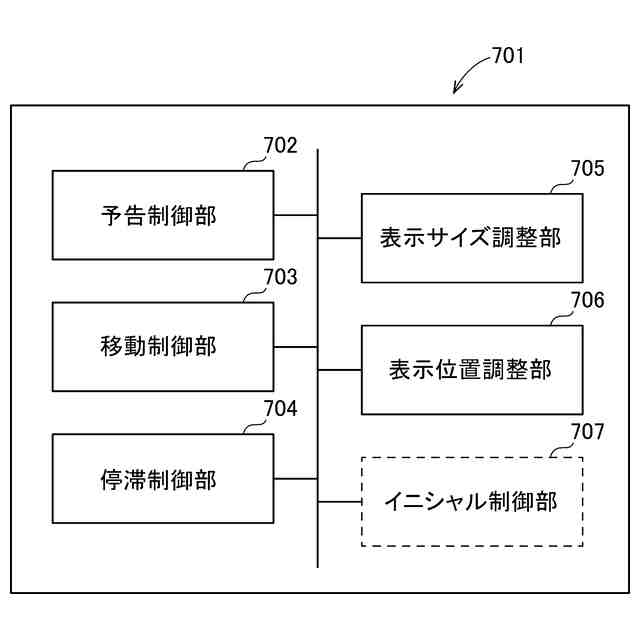
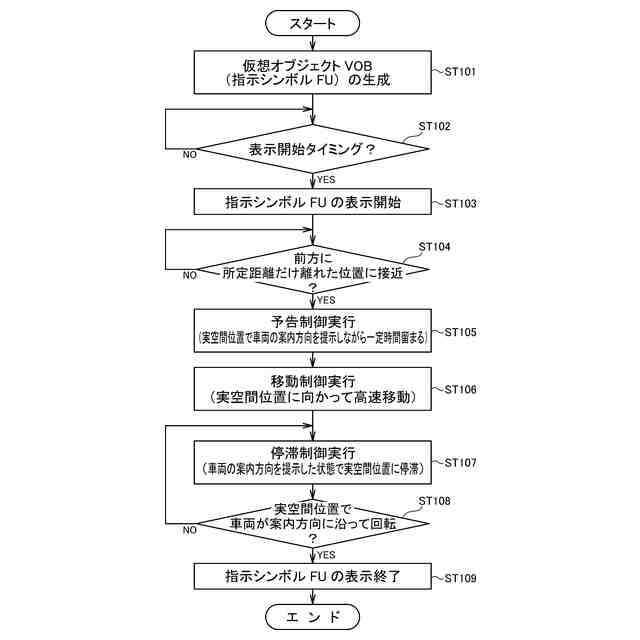
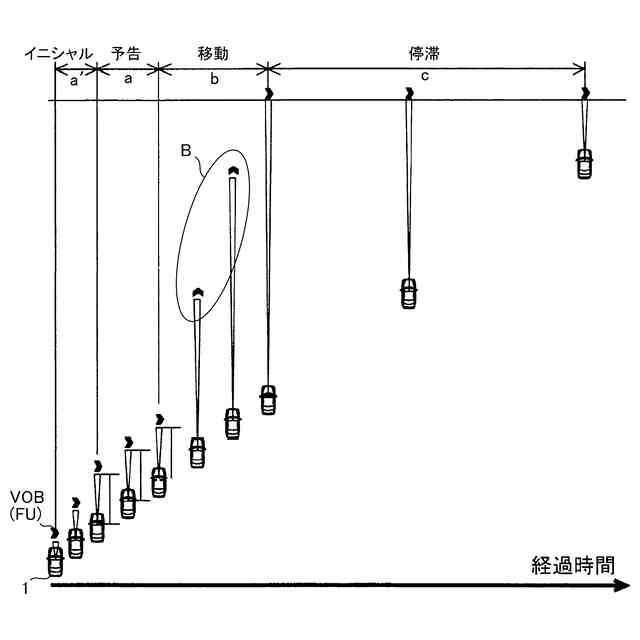
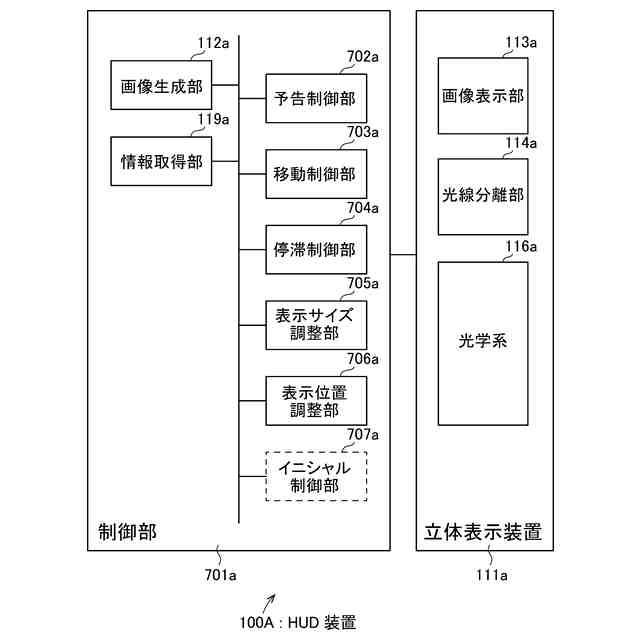
【解決手段】制御部701は、所定の実空間位置で車両1の案内方向の提示を行う仮想オブジェクトVOBとしての指示シンボルFUを路面に沿って移動したように表示する前に、指示シンボルを、車両の前方に所定の距離だけ離れた所定の位置に一定時間だけ留まるように所定の実空間位置での車両の案内方向を予告する制御を実行し、次に、指示シンボルが所定の位置から所定の実空間位置へ移動したように、指示シンボルの表示サイズと表示位置を調整する移動制御を実行し、続いて、指示シンボルが所定の実空間位置での案内方向を提示した状態で所定の実空間位置に停滞したように、指示シンボルの表示サイズと表示位置を調整する停滞制御を実行する。
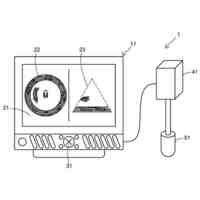
【選択図】図1
特許請求の範囲
【請求項1】
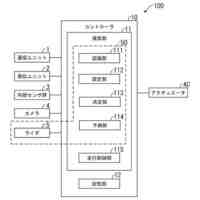
仮想オブジェクトが車両の前方の所定の実空間位置に存在するかのように、前記車両に搭乗する視認者に知覚されるように表示する場合の表示制御を実行する制御部を備えた表示制御装置であって、
前記制御部は、
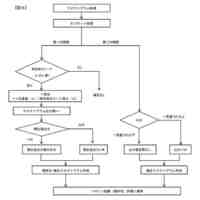
前記所定の実空間位置で前記車両の案内方向の提示を行う前記仮想オブジェクトとしての指示シンボルを路面に沿って移動したように表示する前に、前記指示シンボルを、前記車両の前方に所定の距離だけ離れた所定の位置に一定時間だけ留まるように前記所定の実空間位置での前記車両の案内方向を予告する予告制御を実行し、
次に、前記指示シンボルが前記所定の位置から前記所定の実空間位置へ移動したように、前記指示シンボルの表示サイズと表示位置を調整する、前記指示シンボルの移動制御を実行し、
続いて、前記指示シンボルが前記所定の実空間位置での案内方向を提示した状態で前記所定の実空間位置に停滞したように、前記指示シンボルの表示サイズと表示位置を調整する、前記指示シンボルの停滞制御を実行する、表示制御装置。
続きを表示(約 2,300 文字)
【請求項2】
前記制御部は、
前記移動制御及び/又は前記停滞制御を実行する場合に、前記所定の実空間位置までの距離に応じて前記指示シンボルの表示サイズを調整し、かつ前記所定の実空間位置での案内方向に応じて前記指示シンボルの表示位置を調整する、請求項1記載の表示制御装置。
【請求項3】
前記制御部は、
前記指示シンボルを、前記路面に重畳したように、あるいは前記路面から離れ、前記路面に沿って随時位置を変えて移動したよう拡張現実要素として表示する制御を行う、請求項1記載の表示制御装置。
【請求項4】
前記制御部は、
前記移動制御を実行する場合に、前記指示シンボルを前記所定の実空間位置での案内方向を提示した状態で、前記所定の位置から前記所定の実空間位置まで移動したように表示する制御を行う、請求項1記載の表示制御装置。
【請求項5】
前記制御部は、
前記移動制御を実行する場合に、前記指示シンボルを前記所定の実空間位置での案内方向ではない前記車両の前方を案内した状態で、前記所定の位置から前記所定の実空間位置まで移動したように表示する、請求項1記載の表示制御装置。
【請求項6】
前記制御部は、
前記予告制御の実行に先立ち、前記指示シンボルを、前記車両の前方に所定の距離だけ離れた前記所定の位置よりも前記視認者に近い位置から前記所定の実空間位置まで移動したように、前記指示シンボルの表示サイズと前記指示シンボルの表示位置を調整する制御を行う、請求項1記載の表示制御装置。
【請求項7】
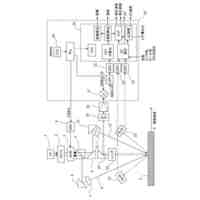
仮想オブジェクトが車両の前方の所定の実空間位置に存在するかのように、前記車両に搭乗する視認者に知覚されるように表示するヘッドアップディスプレイ装置であって、
画像表示部と、
前記所定の実空間位置で前記車両の案内方向の提示を行う前記仮想オブジェクトとしての指示シンボルを路面に沿って移動したように前記画像表示部へ表示する前に、前記指示シンボルを、前記車両の前方に所定の距離だけ離れた所定の位置に一定時間だけ留まるように前記所定の実空間位置での前記車両の案内方向を予告する予告制御を実行し、次に、前記指示シンボルが前記所定の位置から前記所定の実空間位置へ移動したように、前記指示シンボルの表示サイズと表示位置を調整する、前記指示シンボルの移動制御を実行し、続いて、前記指示シンボルが前記所定の実空間位置での案内方向を提示した状態で前記所定の実空間位置に停滞したように、前記指示シンボルの表示サイズと表示位置を調整する、前記指示シンボルの停滞制御を実行する制御部と、を有するヘッドアップディスプレイ装置。
【請求項8】
仮想オブジェクトが車両の前方の所定の実空間位置に存在するかのように、前記車両に搭乗する視認者に知覚されるように表示する表示制御方法であって、
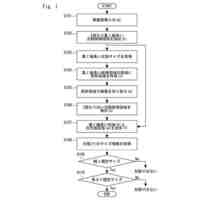
前記所定の実空間位置で前記車両の案内方向の提示を行う前記仮想オブジェクトとしての指示シンボルを路面に沿って移動したように表示する前に、前記指示シンボルを、前記車両の前方に所定の距離だけ離れた所定の位置に一定時間だけ留まるように前記所定の実空間位置での前記車両の案内方向を予告する予告ステップと、
次に、前記指示シンボルが前記所定の位置から前記所定の実空間位置へ移動したように、前記指示シンボルの表示サイズと表示位置を調整する移動ステップと、
続いて、前記指示シンボルが前記所定の実空間位置での案内方向を提示した状態で前記所定の実空間位置に停滞したように、前記指示シンボルの表示サイズと表示位置を調整する停滞ステップと、を有する表示制御方法。
【請求項9】
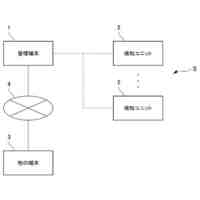
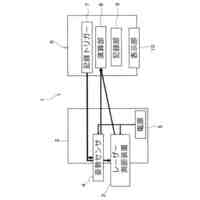
仮想オブジェクトが車両の前方の所定の実空間位置に存在するかのように、前記車両に搭乗する視認者に知覚されるように表示するヘッドアップディスプレイ装置と、少なくとも前記車両の現在位置と前記所定の実空間位置までの距離とを含むナビゲーション情報を提供するナビゲーション装置と、前記ヘッドアップディスプレイ装置の表示制御を行う表示制御装置とを備えた車載システムであって、
前記表示制御装置は、
前記所定の実空間位置で前記車両の案内方向の提示を行う前記仮想オブジェクトとしての指示シンボルを路面に沿って移動したように表示する前に、前記指示シンボルを、前記車両の前方に所定の距離だけ離れた所定の位置に一定時間だけ留まるように前記所定の実空間位置での前記車両の案内方向を予告する予告制御を実行し、
次に、前記指示シンボルが前記所定の位置から前記所定の実空間位置へ移動したように、前記ナビゲーション装置から提供される前記所定の実空間位置までの距離に応じて前記仮想オブジェクトとしての前記指示シンボルの表示サイズを調整し、かつ前記所定の実空間位置での案内方向に応じて前記仮想オブジェクトとしての前記指示シンボルの表示位置を調整する、前記指示シンボルの移動制御を実行し、
続いて、前記指示シンボルが前記所定の実空間位置での案内方向を提示した状態で前記所定の実空間位置に停滞するように、前記ナビゲーション装置から取得した前記所定の実空間位置までの距離に応じて前記仮想オブジェクトとしての前記指示シンボルの表示サイズを調整し、かつ前記所定の実空間位置での案内方向に応じて前記仮想オブジェクトとしての前記指示シンボルの表示位置を調整する、前記指示シンボルの停滞制御を実行する、車載システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、仮想オブジェクトが車両の前方の所定の実空間位置に存在するかのように、車両に搭乗する視認者に知覚されるように表示する場合の表示制御を実行する、表示制御装置等に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
例えば、特許文献1に、3D表示を利用したナビゲーションシステムにおいて、右左折する交差点を示す方法として、視認される実空間位置に重畳される3D空間内に仮想オブジェクトとしての矢印マーク(指示シンボル)の表示を先行させて目的の交差点に定位させ、自車両がその交差点に近づくことにより同時に矢印マークが目的の交差点に接近することで、右折あるいは左折すべき交差点を視認者である乗員に視認させることができる技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
独公開10 2013 224 307号公報(段落[0008]~[0011]、及び図3-図5参照)。
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した特許文献1に記載されたナビゲーションシステムによれば、車両が交差点等の基準点に所定の距離だけ接近した場合に、交差点での案内方向を示す第1の矢印マーク(特許文献1の図3に示すグラフィカルナビゲーション指示109参照)を道路の路面に沿って移動したように先行表示し、そして、車両が交差点等所定の実空間位置に最接近(車両の回転操縦が差し迫った状況)した場合に、仮想現実要素である第2の矢印マーク(特許文献1の図4,図5に示すグラフィカルナビゲーション指示110参照)の表示に切り替えることで、視認者である乗員(運転者)による車両の交差点等における回転操縦をリアルタイムに誘導することができる。
【0005】
しかしながら、特許文献1に記載された技術によれば、矢印マークを先行表示する場合、当該矢印マークの移動距離が大きいと(視認者からの距離が長くなるほど)、視認者である乗員は矢印マークが示す案内方向の認識が困難になることが想定される。また、矢印マークの移動速度が速すぎても同様、矢印マークが示す車両の案内方向の認識が困難になり、右折、あるいは左折を要する交差点に最接近しなければ車両が回転すべき方向が分からないため、乗員がウインカーを操縦するタイミングが遅れてしまうという課題がある、ということを発明者らは認識した。
【0006】
このため、本発明の目的は、指示シンボル(矢印マーク)を先行表示するにあたり、当該指示シンボルを一定時間だけ所定の位置に留まる様に制御することで、指示シンボルが示す交差点等所定の実空間位置での案内方向の知覚を容易にした、表示制御装置等を提供することにある。
【0007】
本発明の他の目的は、以下に例示する態様及び最良の実施形態、並びに添付の図面を参照することによって、当業者に明らかになるであろう。
【課題を解決するための手段】
【0008】
以下に、本発明の概要を容易に理解するために、本発明に従う態様を例示する。
【0009】
本発明に従う第1の態様は、仮想オブジェクトが車両の前方の所定の実空間位置に存在するかのように、前記車両に搭乗する視認者に知覚されるように表示する場合の表示制御を実行する制御部を備えた表示制御装置であって、前記制御部は、前記所定の実空間位置で前記車両の案内方向の提示を行う前記仮想オブジェクトとしての指示シンボルを路面に沿って移動したように表示する前に、前記指示シンボルを、前記車両の前方に所定の距離だけ離れた所定の位置に一定時間だけ留まるように前記所定の実空間位置での前記車両の案内方向を予告する予告制御を実行し、次に、前記指示シンボルが前記所定の位置から前記所定の実空間位置へ移動したように、前記指示シンボルの表示サイズと表示位置を調整する、前記指示シンボルの移動制御を実行し、続いて、前記指示シンボルが前記所定の実空間位置での案内方向を提示した状態で前記所定の実空間位置に停滞したように、前記指示シンボルの表示サイズと表示位置を調整する、前記指示シンボルの停滞制御を実行する表示制御装置である。
【0010】
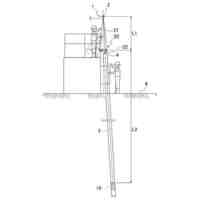
ここで、「仮想オブジェクト」とは、例えば、路面に重畳したように、あるいは路面から離れ、路面に沿って随時位置を変えて路面上を走行するように表示される、車両1のAR要素(拡張現実要素)である、矢印マーク等で表現される指示シンボルのことをいう。また、「所定の実空間位置」とは、進路変更地点である、例えば、交差点での車両の回転操縦を要する地点をいい、また、「車両の前方に所定の距離だけはなれた所定の位置」とは、例えば、車両の4m前方の位置をいい、また、「一定時間だけ留まる」とは、視認者である乗員が指示シンボルにより所定の実空間位置での案内方向を十分に知覚可能な、例えば、2秒程度停滞することをいう。第1の態様では、制御部が、車両の前方案内を行う仮想オブジェクトとしての指示シンボルを路面に沿って移動したように表示させる前に、当該指示シンボルを、車両の前方に所定の距離だけ離れた所定の位置に一定時間留まるように所定の実空間位置での車両の案内方向を予告する予告制御を実行することにより、視認者である乗員は、所定の実空間位置での案内方向(視認者である乗員が車両を回転操縦すべき方向)を事前に知覚することができ、ウインカーを操縦する適切なタイミングを把握することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ユニパルス株式会社
力変換器
17日前
横浜ゴム株式会社
音響窓
19日前
三菱電機株式会社
計測器
11日前
個人
センサーを備えた装置
21日前
株式会社辰巳菱機
システム
5日前
日置電機株式会社
測定装置
18日前
IPU株式会社
距離検出装置
17日前
日本精機株式会社
施工管理システム
21日前
株式会社FRPカジ
FRP装置
7日前
株式会社東芝
センサ
20日前
株式会社カワタ
サンプリング装置
今日
株式会社CAST
センサ固定治具
24日前
大和製衡株式会社
組合せ計量装置
7日前
日本精工株式会社
分注装置
3日前
富士レビオ株式会社
嵌合システム
10日前
学校法人立命館
液面レベルセンサ
4日前
富士電機株式会社
半導体パッケージ
13日前
アズビル株式会社
火炎状態判定装置
18日前
三菱マテリアル株式会社
温度センサ
3日前
本多電子株式会社
超音波ソナー装置
12日前
株式会社熊平製作所
刃物類判別装置
24日前
戸田建設株式会社
測量機
3日前
已久工業股ふん有限公司
空気圧縮機構造
20日前
三和テッキ株式会社
架線の高さ、偏位測定装置
5日前
トヨタ自動車株式会社
表面傷の検査方法
19日前
東ソー株式会社
クロマトグラムの形状判定方法
13日前
トヨタ自動車株式会社
データの補正方法
12日前
コニカミノルタ株式会社
光学特性測定装置
24日前
本田技研工業株式会社
外界認識装置
7日前
アクト電子株式会社
レーザドップラ速度計
7日前
株式会社エイアンドティー
電解質分析装置
3日前
本田技研工業株式会社
物体検出装置
3日前
大豊建設株式会社
鉛直精度測定装置
7日前
大豊建設株式会社
直線精度測定装置
7日前
愛知時計電機株式会社
超音波流量計
17日前
ミネベアミツミ株式会社
ひずみゲージ
24日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ