TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025104350
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2025025134,2022179326
出願日
2025-02-19,2022-11-09
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20250702BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】圃場に合った自動走行を実行する作業車両を提供すること。
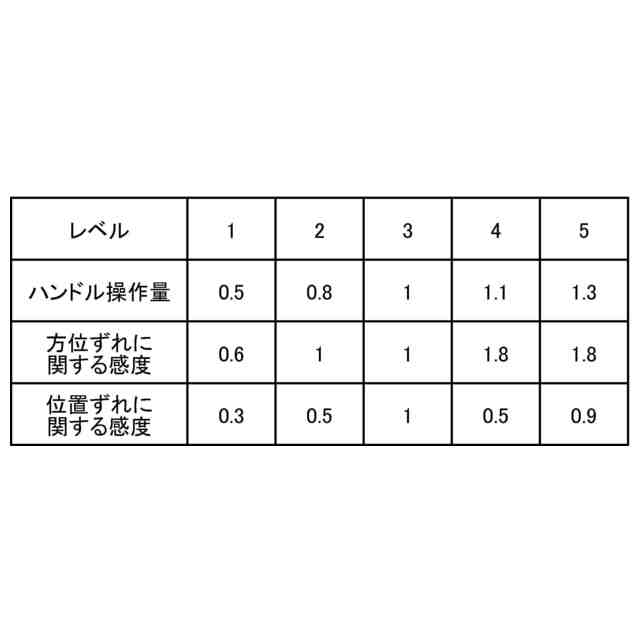
【解決手段】走行車体に設けられた作業機と、走行車体に設けられたハンドルと、各部の操作を行う操作部と、走行車体の位置、および、走行車体の方位に関する情報を検出する位置検出装置と、走行車体の走行モードが自動走行モードである場合、ハンドルを駆動するモータと、走行モードが自動走行モードである場合、位置検出装置によって検出される情報に基づいて、モータを制御する制御装置とを備え、制御装置は、走行車体の走行レベルを作業者によって複数のレベルの中から設定可能であり、複数のレベルには、複数のパラメータがそれぞれ紐付けられ、複数のパラメータは、ハンドルの操作量と、走行車体の方位ずれに関する感度または走行車体の位置ずれに関する感度であり、作業者による操作部の操作に基づいて、走行レベルを設定する。
【選択図】図6
特許請求の範囲
【請求項1】
走行車体と、
前記走行車体に設けられた作業機と、
前記走行車体に設けられたハンドルと、各部の操作を行う操作部と、
前記走行車体の位置、および、前記走行車体の方位に関する情報を検出する位置検出装置と、
前記走行車体の走行モードが自動走行モードである場合、前記ハンドルを駆動するモータと、
前記走行モードが前記自動走行モードである場合、前記位置検出装置によって検出される情報に基づいて、前記モータを制御する制御装置と
を備え、
前記制御装置は、
前記走行車体の走行レベルを作業者によって複数のレベルの中から設定可能であり、
前記複数のレベルには、複数のパラメータがそれぞれ紐付けられ、
前記複数のパラメータは、前記ハンドルの操作量と、前記走行車体の方位ずれに関する感度または前記走行車体の位置ずれに関する感度であり、
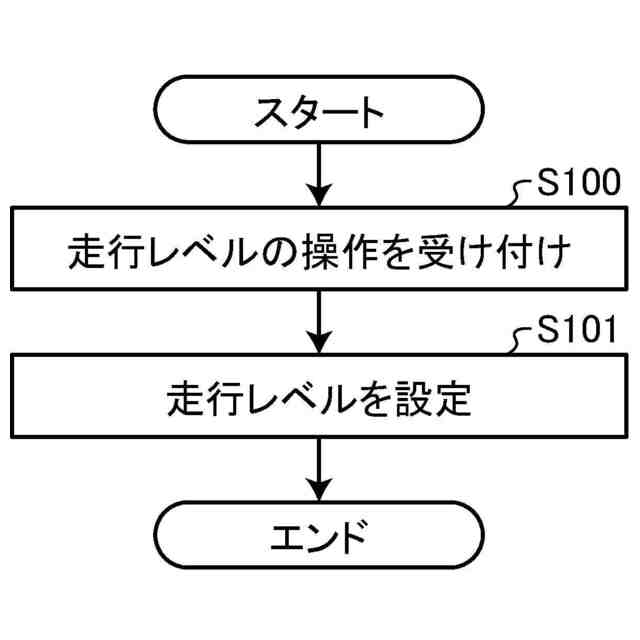
作業者による前記操作部の操作に基づいて、前記走行レベルを設定する作業車両。
続きを表示(約 310 文字)
【請求項2】
前記制御装置は、作業者による前記操作部の操作に基づいて設定される前記走行車体のタイヤの種類に応じて、前記複数のパラメータの少なくとも一部を変更する、請求項1に記載の作業車両。
【請求項3】
エンジンと、
前記エンジンによって発生する回転が伝達されて発生する油圧によって、前記走行車体
の操舵輪の向きを変更する調整機構と
を備え、
前記制御装置は、前記走行モードが自動旋回モードの状態で、前記走行車体が旋回しており、かつ、実ハンドル角速度が、目標ハンドル角速度よりも小さい場合、前記エンジンの回転数を増加させる、請求項1~3のいずれか1つに記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、作業者の操作によらず走行する自動走行を実行可能な苗移植機が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2019-76056号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、圃場の状態は、圃場に応じて異なることがあり、自動走行によって走行する場合、圃場に合った自動走行を実行できないおそれがあり、改善の余地がある。
【0005】
本発明は、上記に鑑みてなされたものであって、圃場に合った自動走行を実行する作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記した課題を解決し、目的を達成するために、実施形態の一態様に係る作業車両は、走行車体と、前記走行車体に設けられた作業機と、前記走行車体に設けられたハンドルと、各部の操作を行う操作部と、前記走行車体の位置、および、前記走行車体の方位に関する情報を検出する位置検出装置と、前記走行車体の走行モードが自動走行モードである場合、前記ハンドルを駆動するモータと、前記走行モードが前記自動走行モードである場合、前記位置検出装置によって検出される情報に基づいて、前記モータを制御する制御装置とを備え、前記制御装置は、前記走行車体の走行レベルを作業者によって複数のレベルの中から設定可能であり、前記複数のレベルには、複数のパラメータがそれぞれ紐付けられ、前記複数のパラメータは、前記ハンドルの操作量と、前記走行車体の方位ずれに関する感度または前記走行車体の位置ずれに関する感度であり、作業者による前記操作部の操作に基づいて、前記走行レベルを設定する。
【発明の効果】
【0007】
実施形態の一態様によれば、作業車両は、圃場に合った自動走行を実行することができる。
【図面の簡単な説明】
【0008】
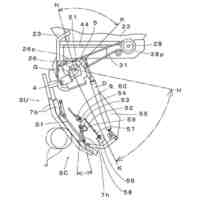
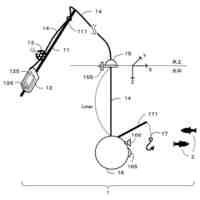
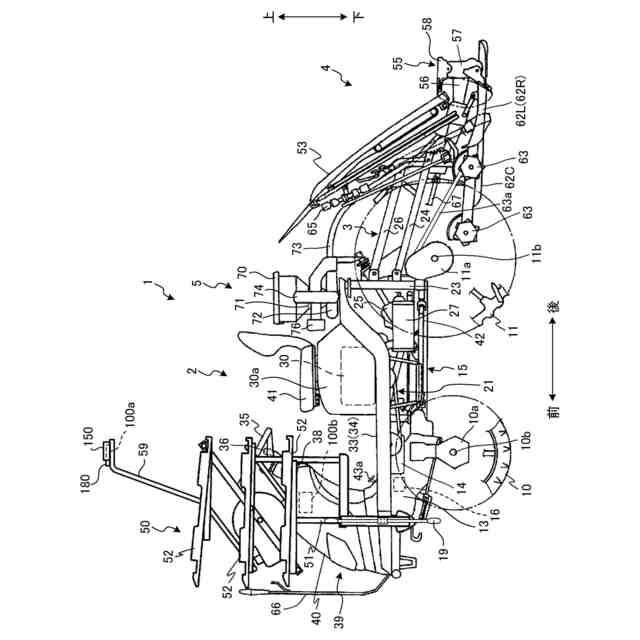
図1は、作業車両を示す側面図である。
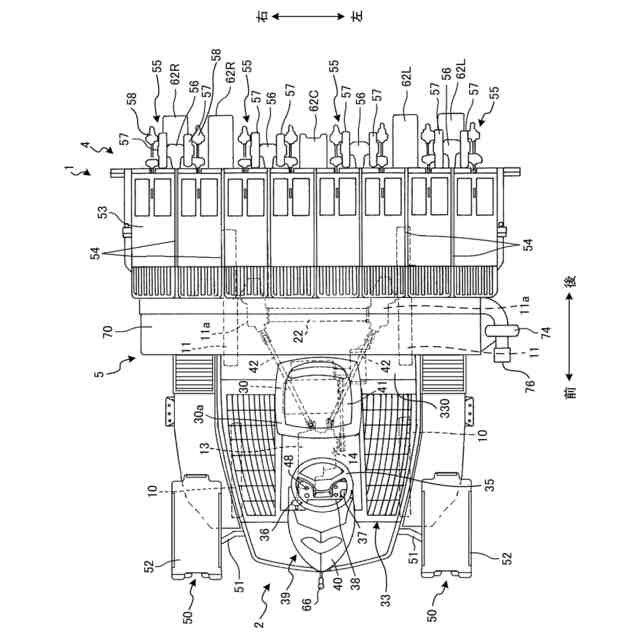
図2は、作業車両を示す平面図である。
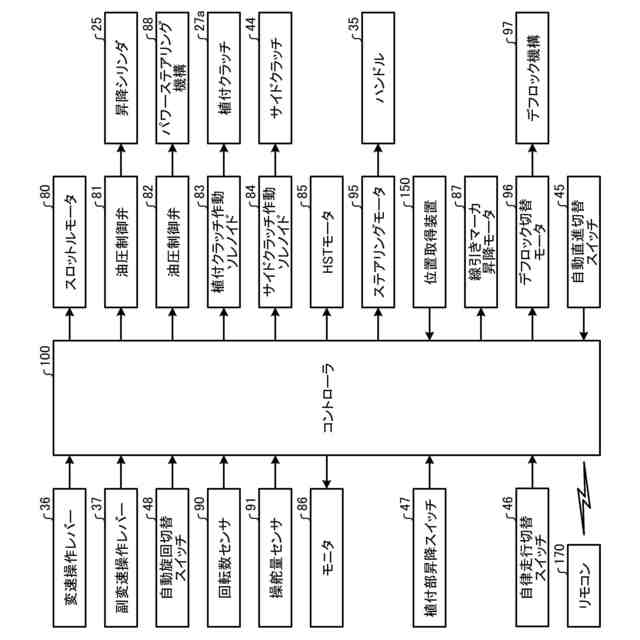
図3は、苗移植機の制御装置を中心とした制御系を示すブロック図である。
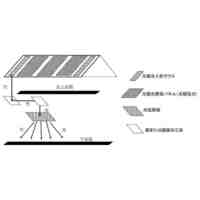
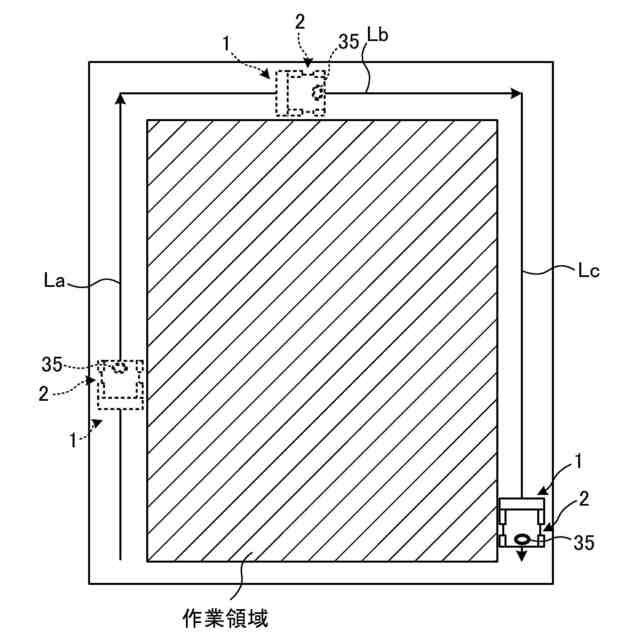
図4は、実施形態に係るティーチング走行による作業領域の設定方法を示す図である。
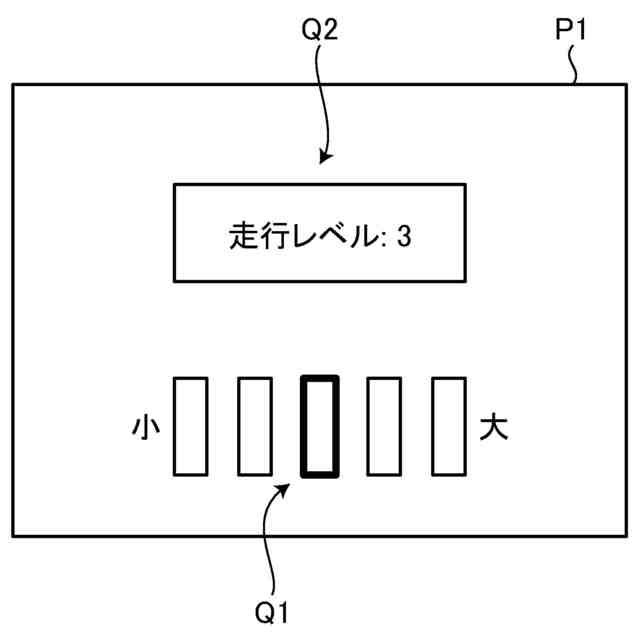
図5は、走行レベルを示す画像の一例である。
図6は、各レベルと、複数のパラメータとの関係を示す図である。
図7は、実施形態に係る走行レベルの設定処理を説明するフローチャートである。
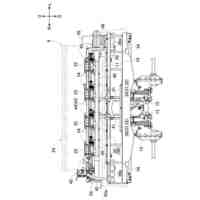
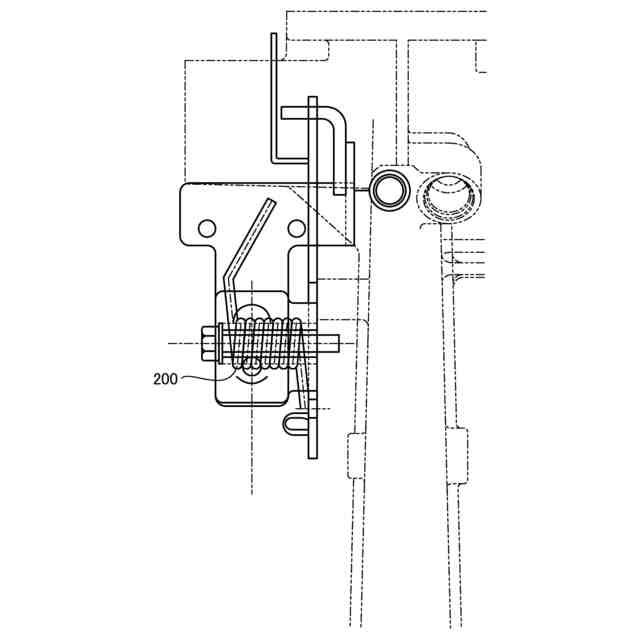
図8は、苗移植機の一部の構成を示す図である。
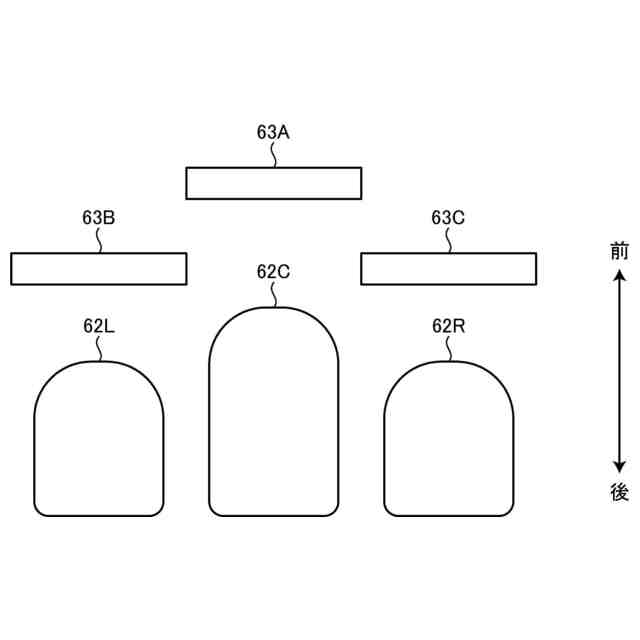
図9は、苗移植機の3つの整地ロータの配置を示す図である。
図10は、リモコンや、タブレットに表示される画像の一例を示す図である。
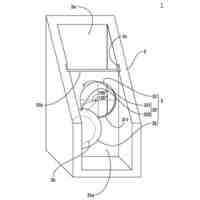
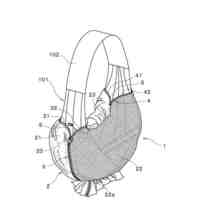
図11は、変形例に係る苗移植機の後方斜視図である。
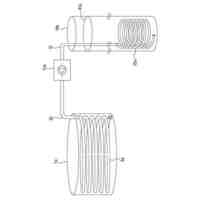
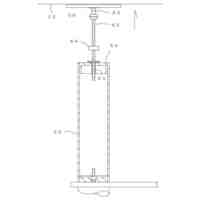
図12は、シートを引き出す構成を説明する概略図である。
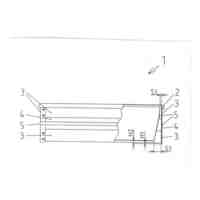
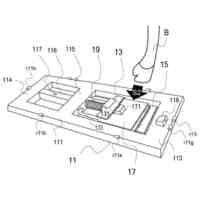
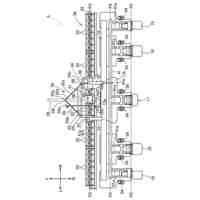
図13は、変形例に係る苗移植機の搬送部、および、敷設部を示す斜視図である。
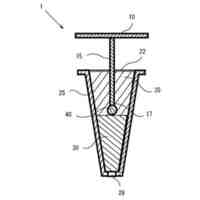
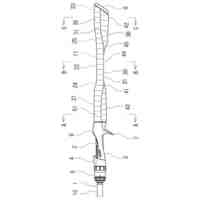
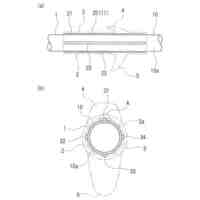
図14は、変形例に係る苗移植機の植込杆の構成を示す断面図である。
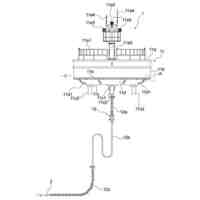
図15は、変形例に係る植込杆のブッシュの構成を示す図である。
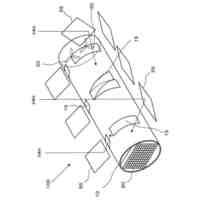
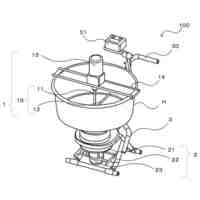
図16は、変形例に係るドローンの斜視図である。
図17は、変形例に係る苗移植機の前輪側の構成を示す図である。
図18は、変形例に係る苗移植機のフリーホイル機構を説明する分解図である。
【発明を実施するための形態】
【0009】
まず、図1および図2を参照して実施形態に係る作業車両1の概要について説明する。図1は、作業車両1を示す側面図である。図2は、作業車両1を示す平面図である。
【0010】
なお、以下の説明では、前後方向とは、作業車両1の直進時における進行方向であり、進行方向の前方側を「前」、後方側を「後」と規定する。作業車両1の進行方向とは、直進時において、操縦席41からハンドル35(ステアリング装置)に向かう方向である(図1および図2参照)。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
ルアー
19日前
個人
播種装置
16日前
個人
虫の生け捕り具
4日前
個人
プランターセット
23日前
個人
養殖システム
11日前
個人
生命力近親交配方法
23日前
個人
獣捕獲罠装置
26日前
株式会社シマノ
釣竿
12日前
岡部株式会社
浮魚礁
4日前
個人
ペット用オムツカバー
1か月前
株式会社アテックス
草刈機
1か月前
株式会社シマノ
釣竿
1か月前
井関農機株式会社
作業車両
9日前
個人
植物栽培装置
1か月前
井関農機株式会社
収穫作業車両
5日前
中国電力株式会社
巣撤去具
2日前
個人
漁業支援装置及び方法
17日前
ウエダ産業株式会社
切断装置
12日前
株式会社フルトン
水中捕捉装置
1か月前
株式会社パクマケ
植栽用遮光板
1か月前
第一衛材株式会社
ペット用おむつ
2日前
個人
害虫捕獲、解放及び駆除装置
26日前
鹿島建設株式会社
レインガーデン
20日前
個人
落口枡用取付部材及び落口枡
20日前
株式会社泰
愛玩動物用タワー家具
1か月前
株式会社ササキコーポレーション
農作業機
18日前
OTIS株式会社
ルアー用スカート
16日前
株式会社和コーポレーション
肥料散布機
1か月前
個人
ペット搬送用バッグの開放部カバー
1か月前
株式会社クボタ
水田作業機
23日前
株式会社クボタ
圃場作業機
11日前
株式会社Personal AI
反射光拡散装置
23日前
株式会社トクイテン
青果物収穫装置
5日前
有限会社小阪組
切り株処理方法及び積層体
27日前
株式会社シマノ
ルアー
18日前
株式会社シマノ
ルアー
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ