TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043300
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2024153560
出願日
2024-09-06
発明の名称
人体のキーポイントの検出方法及び装置
出願人
富士通株式会社
代理人
弁理士法人ITOH
主分類
G01S
13/88 20060101AFI20250321BHJP(測定;試験)
要約
【課題】本発明の実施例は、人体のキーポイントの検出方法及び装置を提供する。
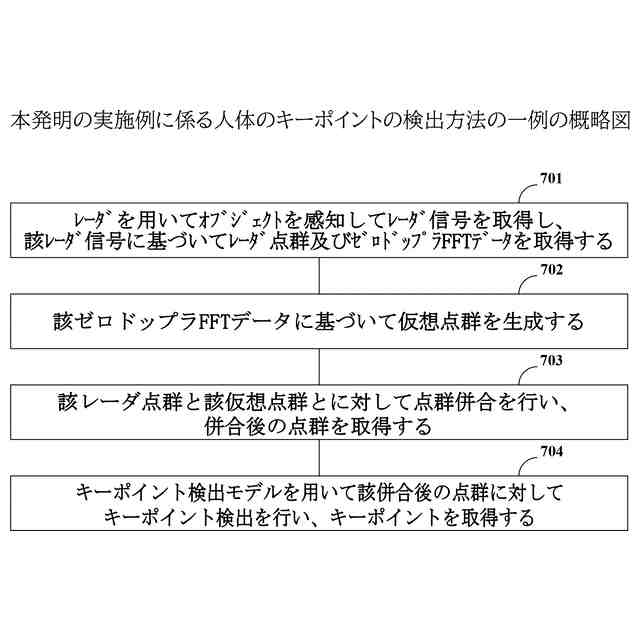
【解決手段】該方法は、レーダを用いてオブジェクトを感知してレーダ信号を取得し、レーダ信号に基づいてレーダ点群及びゼロドップラFFTデータを取得するステップと、該ゼロドップラFFTデータに基づいて仮想点群を生成するステップと、該レーダ点群と該仮想点群とに対して点群併合を行い、併合後の点群を取得するステップと、キーポイント検出モデルを用いて該併合後の点群に対してキーポイント検出を行い、キーポイントを取得するステップと、を含む。本発明の実施例によれば、運動部位に対応するレーダ点群及び静止部位に対応する仮想点群に基づいて人体のキーポイントを検出することによって、より完全な目標情報を提供することができるため、検出精度を向上させることができる。
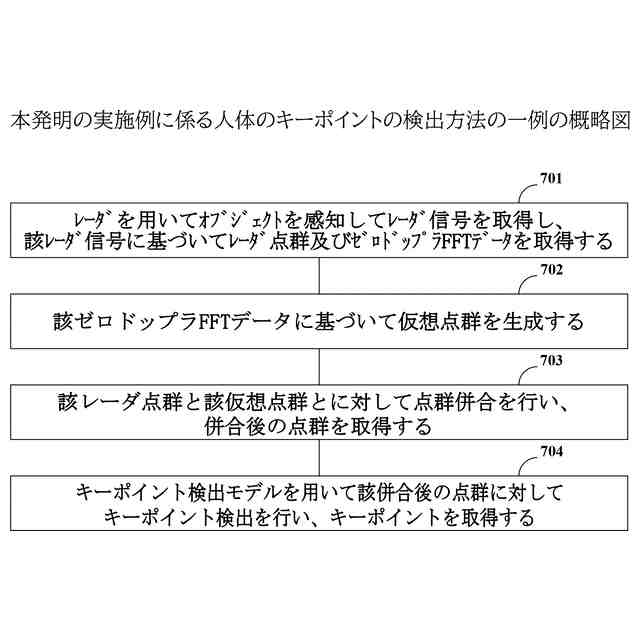
【選択図】図7
特許請求の範囲
【請求項1】
人体のキーポイントの検出装置であって、
レーダを用いてオブジェクトを感知してレーダ信号を取得し、前記レーダ信号に基づいてレーダ点群及びゼロドップラFFTデータを取得する取得部と、
前記ゼロドップラFFTデータに基づいて仮想点群を生成する生成部と、
前記レーダ点群と前記仮想点群とに対して点群併合を行い、併合後の点群を取得する併合部と、
キーポイント検出モデルを用いて前記併合後の点群に対してキーポイント検出を行い、キーポイントを取得する検出部と、を含む、装置。
続きを表示(約 1,800 文字)
【請求項2】
前記生成部は、前記ゼロドップラFFTデータに基づいて仮想点群を生成する際に、
前記ゼロドップラFFTデータに対して2次元のフーリエ変換を行い、角度FFTデータを取得し、
T個のフレームの角度FFTデータに基づいて、直前のフレームと直後のフレームとの差分値の平均値を計算し、Tは0よりも大きく、
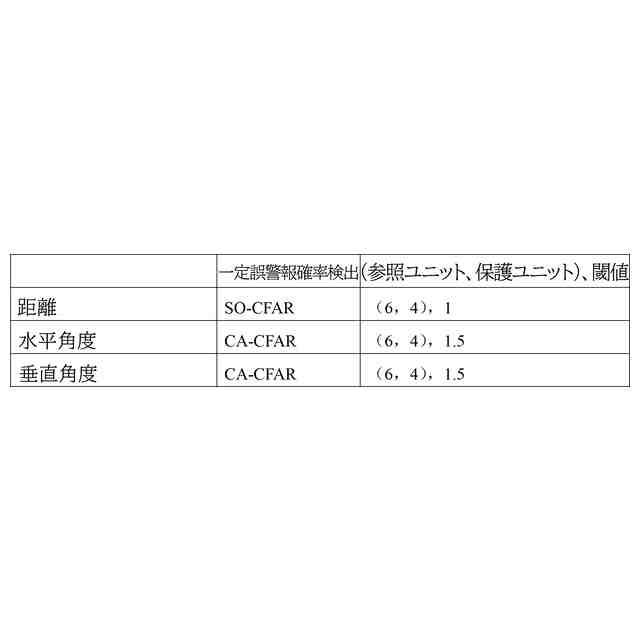
前記平均値の垂直角度、水平角度及び距離の3つの方向に、一定誤警報確率検出をそれぞれ行い、位置の値が何れも所定の一定誤警報確率検出閾値よりも大きい位置を仮想点群の目標位置として判断し、
前記目標位置を座標に変換し、前記仮想点群を取得する、請求項1に記載の装置。
【請求項3】
所定の距離範囲以外の仮想点群をフィルタリングにより除去するように、前記仮想点群と前記レーダ点群との間の距離に基づいて、前記仮想点群をフィルタリングするフィルタリング部、をさらに含む、請求項1に記載の装置。
【請求項4】
前記フィルタリング部は、前記レーダ点群の中心からの距離が第1の所定の閾値以上である仮想点群をフィルタリングにより除去し、或いは、
前記フィルタリング部は、レーダ点群からの面取り距離が第2の所定の閾値以上である仮想点群をフィルタリングにより除去する、請求項3に記載の装置。
【請求項5】
所定の規則に従って前記仮想点群を並べ替える並び替え部と、
並べ替えられた上位の所定の数の仮想点群を最終的な結果として選択する選択部と、をさらに含む、請求項1に記載の装置。
【請求項6】
前記所定の規則は、T個のフレームの角度FFTデータの直前のフレームと直後のフレームとの差分値の平均値を含み、Tは0よりも大きく、
前記並び替え部は、T個のフレームの角度FFTデータの直前のフレームと直後のフレームとの差分値の平均値に従って前記仮想点群を並び替え、
前記選択部は、上位のM個の仮想点群を選択し、Mは0よりも大きい、請求項5に記載の装置。
【請求項7】
前記所定の規則は、前記仮想点群と前記レーダ点群の中心との距離を含み、
前記並び替え部は、前記仮想点群と前記レーダ点群の中心との距離に従って前記仮想点群を並び替え、
前記選択部は、距離が最も小さいM個の仮想点群を選択し、Mは0よりも大きい、請求項5に記載の装置。
【請求項8】
前記併合部は、前記レーダ点群と前記仮想点群とに対して点群併合を行う際に、
前記レーダ点群の数と前記仮想点群の数との和を併合後の点群の数とし、
前記レーダ点群の特徴及び前記仮想点群の特徴を、v、p、x、y、z、fID及びAM_differenceにそれぞれ対応する7つにそれぞれ拡張し、
前記レーダ点群の特徴について、v、p、x、y、z、fIDの値は真値であり、AM_differenceの値は0又は対応する仮想点群の真値であり、
前記仮想点群の特徴について、v及びpの値は0であり、x、y、zの値は真値であり、fIDの値は固定値であり、AM_differenceの値は0又は真値であり、
vはドップラであり、pは信号強度であり、fIDはフレーム番号であり、x、y、zは点群の空間位置の座標であり、AM_differenceはT個のフレームの角度FFTデータにおける直前のフレームと直後のフレームとの差分値の平均値である、請求項1に記載の装置。
【請求項9】
人体のキーポイントの検出方法であって、
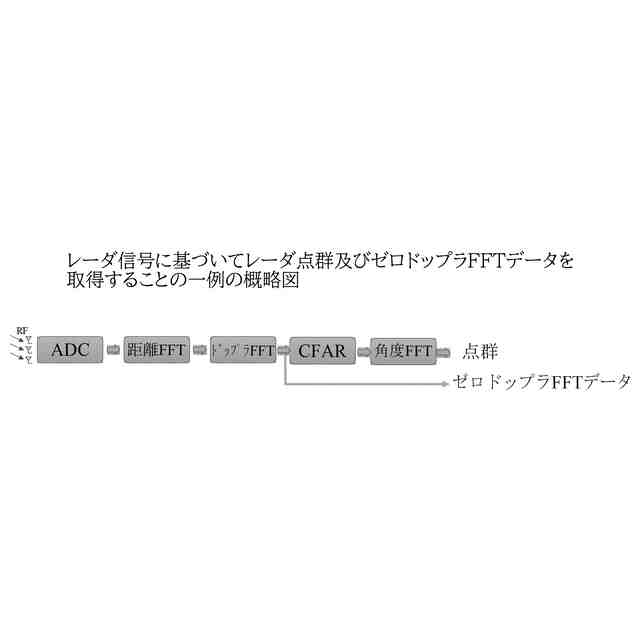
レーダを用いてオブジェクトを感知してレーダ信号を取得し、前記レーダ信号に基づいてレーダ点群及びゼロドップラFFTデータを取得するステップと、
前記ゼロドップラFFTデータに基づいて仮想点群を生成するステップと、
前記レーダ点群と前記仮想点群とに対して点群併合を行い、併合後の点群を取得するステップと、
キーポイント検出モデルを用いて前記併合後の点群に対してキーポイント検出を行い、キーポイントを取得するステップと、を含む、方法。
【請求項10】
コンピュータプログラムが記憶されたメモリと、プロセッサと、を含む、電子機器であって、前記プロセッサは、請求項9に記載の方法を実現するように、前記コンピュータプログラムを実行するように構成される、電子機器。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施例は、レーダ検出の技術分野に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
レーダ点群に基づく人体のキーポイントの検出方法は、プライバシーを侵害せず、光がなく、又は部分的に遮蔽されているシーンにおいて動作でき、且つ人体のキーポイントの実の空間位置を取得できるため、広く応用されている。
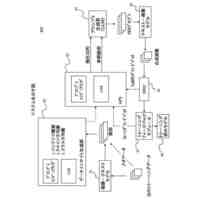
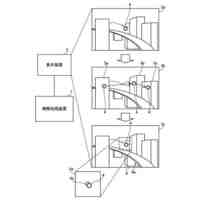
【0003】
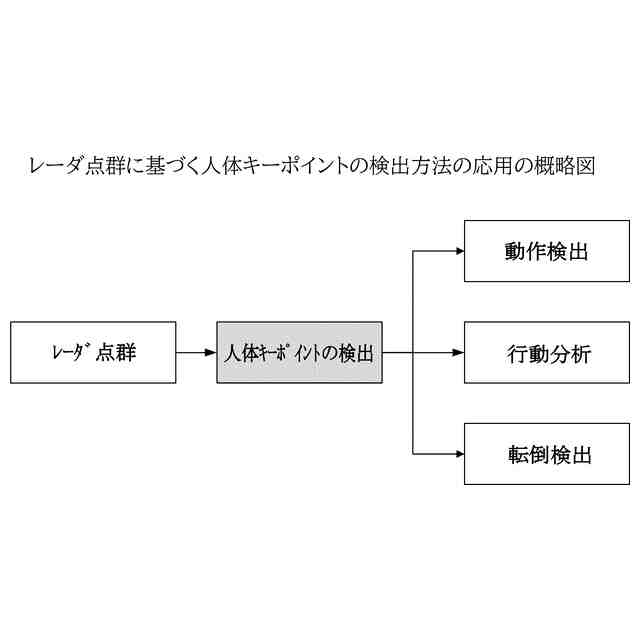
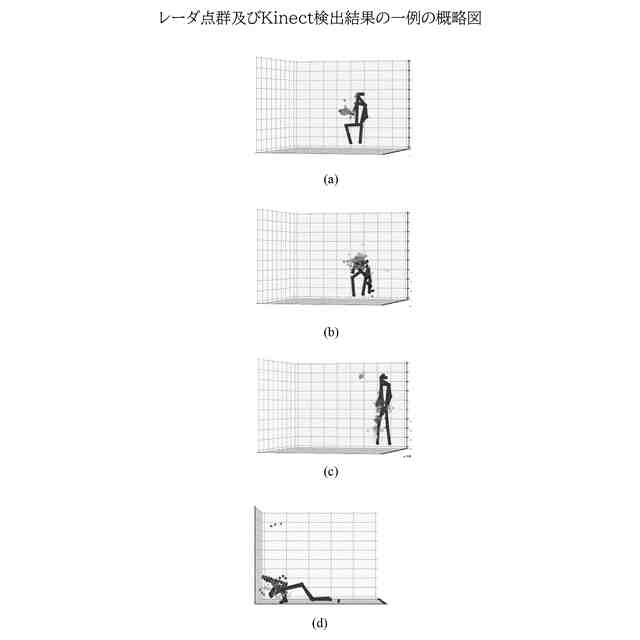
図1は、レーダ点群に基づく人体キーポイントの検出方法の応用の概略図である。図1に示すように、人体が動いている際に、レーダから対応する点群を取得し、点群から人体のキーポイント情報を検出することができ、該人体のキーポイント情報は、動作検出、行動分析及び転倒検出などに利用することができる。
【0004】
動作検出及び行動分析では、キーポイントの相対位置及び統計情報を分析することによって、動作及び行動を決定することができる。転倒検出では、人体のキーポイント位置の高さ情報に基づいて、目標が転倒したか否かを判断することができる。
【0005】
なお、上述した技術背景の説明は、本発明の技術案を明確、完全に理解させるための説明であり、当業者を理解させるために記述されているものである。これらの技術案は、単なる本発明の背景技術部分として説明されたものであり、当業者により周知されたものではない。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の発明者の発見によると、通常、レーダにより出力された点群(レーダ点群又は基礎点群又は元の点群と称される)は、目標の運動により発生し、目標の運動部位の情報を反映し、一方、速度がゼロである静止部位には点群がない。このため、点群が目標を完全に表すことができない場合がある。また、入力されたレーダ点群の品質は、キーポイントの検出精度に直接影響を及ぼす。
【0007】
上記の技術的問題を鑑み、本発明の実施例は、検出精度を向上させることができるキーポイントの検出方法及び装置を提供する。
【課題を解決するための手段】
【0008】
本発明の実施例の1つの態様では、人体のキーポイントの検出方法であって、レーダを用いてオブジェクトを感知してレーダ信号を取得し、前記レーダ信号に基づいてレーダ点群及びゼロドップラFFTデータを取得するステップと、前記ゼロドップラFFTデータに基づいて仮想点群を生成するステップと、前記レーダ点群と前記仮想点群とに対して点群併合を行い、併合後の点群を取得するステップと、キーポイント検出モデルを用いて前記併合後の点群に対してキーポイント検出を行い、キーポイントを取得するステップと、を含む、方法を提供する。
【0009】
本発明の実施例のもう1つの態様では、人体のキーポイントの検出装置であって、レーダを用いてオブジェクトを感知してレーダ信号を取得し、前記レーダ信号に基づいてレーダ点群及びゼロドップラFFTデータを取得する取得部と、前記ゼロドップラFFTデータに基づいて仮想点群を生成する生成部と、前記レーダ点群と前記仮想点群とに対して点群併合を行い、併合後の点群を取得する併合部と、キーポイント検出モデルを用いて前記併合後の点群に対してキーポイント検出を行い、キーポイントを取得する検出部と、を含む、装置を提供する。
【0010】
本発明の実施例のもう1つの態様では、コンピュータプログラムが記憶されたメモリと、プロセッサと、を含む、電子機器であって、前記プロセッサは、上記の人体のキーポイントの検出方法を実現するように、前記コンピュータプログラムを実行するように構成される、電子機器を提供する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
富士通株式会社
半導体装置
1か月前
富士通株式会社
行列演算回路
1か月前
富士通株式会社
周波数変換器
1か月前
富士通株式会社
メッシュ微細化
1か月前
富士通株式会社
画像処理モデル
1か月前
富士通株式会社
半導体デバイス
1か月前
富士通株式会社
演算器及び演算方法
1か月前
富士通株式会社
ポイントクラウド分類
1か月前
富士通株式会社
ハイブリッド光増幅器
2か月前
富士通株式会社
冷却装置及び電子機器
1か月前
富士通株式会社
アレイアンテナモジュール
1か月前
富士通株式会社
電子機器筐体及び電子機器
1か月前
富士通株式会社
OLT及びPONシステム
18日前
富士通株式会社
光送信器及び光トランシーバ
1か月前
富士通株式会社
演算処理装置及び情報処理装置
28日前
富士通株式会社
情報処理装置及び情報処理方法
4日前
富士通株式会社
演算処理装置及び演算処理方法
2か月前
富士通株式会社
通信制御装置及び移動中継装置
1か月前
富士通株式会社
プログラム及びデータ処理装置
12日前
富士通株式会社
基板及びこれを備えた電子装置
1か月前
富士通株式会社
テキスト案内される画像エディタ
1か月前
富士通株式会社
波長変換装置および波長変換方法
1か月前
富士通株式会社
メモリ管理装置及びメモリ管理方法
1か月前
富士通株式会社
動的多次元メディアコンテンツ投影
2か月前
富士通株式会社
ラックマウント装置及びラック装置
1か月前
富士通株式会社
ポイントクラウドレジストレーション
3か月前
富士通株式会社
不正検知プログラム、方法、及び装置
4日前
富士通株式会社
異常予測方法および異常予測プログラム
2か月前
富士通株式会社
視線誘導方法および視線誘導プログラム
3か月前
富士通株式会社
通知プログラム、通知方法および通知装置
17日前
富士通株式会社
受光デバイス及び受光デバイスの製造方法
17日前
富士通株式会社
生成人工知能を使用したデータセット符号化
2か月前
富士通株式会社
管理装置、管理方法、および管理プログラム
1か月前
富士通株式会社
コンパイルプログラムおよびコンパイル方法
12日前
富士通株式会社
演算システムおよび演算システムの制御方法
2か月前
富士通株式会社
交通シミュレーションのための方法および装置
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ