TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025038870
公報種別
公開特許公報(A)
公開日
2025-03-19
出願番号
2024131210
出願日
2024-08-07
発明の名称
システム、制御装置、制御方法およびプログラム
出願人
キヤノン株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
H04N
23/61 20230101AFI20250312BHJP(電気通信技術)
要約
【課題】撮影位置や撮影方向が異なる複数の撮像装置により特定の被写体を追尾することが可能となるシステムを提供する。
【解決手段】撮影方向が異なる第1及び第2撮像装置と、第1及び第2撮像装置により撮像された第1または第2画像に基づいて所定の被写体を追尾するように第2撮像装置を制御する第1制御装置及び第2制御装置とを含むシステムであって、第2制御装置は、第2画像に含まれる被写体の第2特徴情報を生成する第2生成手段と、第1制御装置により生成された第1特徴情報と第2生成手段により生成された第2特徴情報とを比較する比較手段とを有し、第1及び第2特徴情報は、撮影方向が異なる複数の撮像装置により同一の被写体が撮影されている場合に同一の被写体であることが特定可能な情報であり、比較手段の結果に基づいて、第1制御装置が第2撮像装置を制御する第1状態と、第2制御装置が第2撮像装置を制御する第2状態とを切り替える。
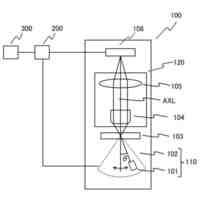
【選択図】図3
特許請求の範囲
【請求項1】
撮影方向が異なる第1の撮像装置および第2の撮像装置と、前記第1の撮像装置により撮像された第1の画像または前記第2の撮像装置により撮像された第2の画像に基づいて所定の被写体を追尾するように前記第2の撮像装置を制御する第1の制御装置および第2の制御装置と、を含むシステムであって、
前記第1の制御装置は、
前記第1の画像に含まれる前記所定の被写体の第1の特徴情報を生成する第1の生成手段と、
前記第1の特徴情報に基づいて前記所定の被写体を追尾するように前記第2の撮像装置を制御する第1の制御手段と、を有し、
前記第2の制御装置は、
前記第2の画像に含まれる被写体の第2の特徴情報を生成する第2の生成手段と、
前記第1の制御装置により生成された前記第1の特徴情報と前記第2の生成手段により生成された前記第2の特徴情報とを比較する比較手段と、
前記第2の特徴情報に基づいて前記所定の被写体を追尾するように前記第2の撮像装置を制御する第2の制御手段と、を有し、
前記第1の特徴情報および前記第2の特徴情報は、撮影方向が異なる複数の撮像装置により同一の被写体が撮影されている場合に、同一の被写体であることが特定可能な情報であり、
前記比較手段による比較の結果に基づいて、前記第1の特徴情報に基づいて前記所定の被写体を追尾するように前記第1の制御装置が前記第2の撮像装置を制御する第1の状態と、前記第2の特徴情報に基づいて前記所定の被写体を追尾するように前記第2の制御装置が前記第2の撮像装置を制御する第2の状態とを切り替えることを特徴とするシステム。
続きを表示(約 1,500 文字)
【請求項2】
前記第1の制御装置は、前記第1の特徴情報を前記第2の制御装置に送信し、
前記第1の制御手段は、前記比較手段による比較の結果に基づいて、前記第1の特徴情報と前記第2の特徴情報とが所定の条件を満たす場合は、前記第2の状態に切り替え、
前記第1の特徴情報と前記第2の特徴情報とが前記所定の条件を満たさない場合は、前記第1の状態に切り替えることを特徴とする請求項1に記載のシステム。
【請求項3】
前記所定の条件は、前記第1の特徴情報と前記第2の特徴情報の類似度が閾値以上の場合であり、
前記比較手段は、前記第1の特徴情報と前記第2の特徴情報の類似度を算出し、前記類似度と前記閾値との比較結果を出力することを特徴とする請求項2に記載のシステム。
【請求項4】
前記第2の制御手段は、前記所定の被写体が前記第2の撮像装置の撮影範囲に存在する場合に、前記所定の被写体を追尾するように前記第2の撮像装置を制御し、
前記所定の被写体が前記第2の撮像装置の撮影範囲に存在しなくなった場合は、前記所定の被写体の追尾を継続できないことを前記第1の制御装置に通知し、
前記第1の制御手段は、前記通知を受けて前記第2の状態から前記第1の状態に切り替えることを特徴とする請求項1に記載のシステム。
【請求項5】
前記所定の被写体が変更された場合、前記第1の制御手段は、前記第2の状態から前記第1の状態に切り替えることを特徴とする請求項1に記載のシステム。
【請求項6】
前記所定の被写体が変更された場合、前記第1の制御手段は、前記第1の特徴情報と前記第2の特徴情報とが所定の条件を満たす場合は、前記第1の状態から前記第2の状態に切り替える請求項5に記載のシステム。
【請求項7】
前記第1の制御装置は、
前記第1の画像から検出された被写体から前記所定の被写体を決定する第1の追尾対象決定手段と、
前記所定の被写体の前記第1の特徴情報を決定し、前記第2の制御装置に送信する特徴情報決定手段と、
前記所定の被写体を追尾するように前記第2の制御装置の撮影方向を制御する第1の制御情報を生成する第1の制御情報生成手段と、を有し、
前記第2の制御装置は、
前記第2の画像から検出された被写体の前記第2の特徴情報と、前記第1の制御装置から受信した前記所定の被写体の前記第1の特徴情報とに基づいて前記第2の画像から検出された被写体から前記所定の被写体を決定する第2の追尾対象決定手段と、
前記所定の被写体を追尾するように前記第2の制御装置の撮影方向を制御する第2の制御情報を生成する第2の制御情報生成手段と、を有することを特徴とする請求項1に記載のシステム。
【請求項8】
前記第2の撮像装置は、前記第1の制御装置または前記第2の制御装置から取得した制御情報に基づいて前記所定の被写体を追尾するように前記第2の制御装置の撮影方向を制御することを特徴とする請求項7に記載のシステム。
【請求項9】
前記第2の撮像装置は、前記第1の制御装置と前記第2の制御装置から取得した制御情報のいずれかに基づいて前記所定の被写体を追尾するように前記第2の制御装置の撮影方向を制御することを特徴とする請求項7に記載のシステム。
【請求項10】
前記制御情報は、パン値とチルト値の少なくともいずれかを含むことを特徴とする請求項7に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、撮影位置や撮影方向が異なる複数の撮像装置により特定の被写体を追尾するシステムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
パン/チルト/ズーム(PTZ)を遠隔から自動制御可能な撮像装置により特定の被写体を追尾する技術がある。このような自動追尾制御では、追尾対象の被写体を撮影画角内の所望の位置に配置するようにPTZを自動的に制御する。
【0003】
特許文献1には、撮影画角が広角に固定された撮像装置(画角固定カメラ)と、PTZ機能を有する撮像装置(PTZカメラ)とを連携させて特定の被写体を追尾する技術が記載されている。特許文献1では、追尾対象の被写体が画角固定カメラの画角外に移動して捕捉できなくなった場合であっても追尾対象の被写体の移動予測を行うことによりPTZカメラにより捕捉できるようにしている。
【0004】
また、特許文献2には、第1の撮像装置の撮影範囲の境界付近に追尾対象の被写体が移動した場合に、第1の撮像装置で生成された追尾対象の被写体のテンプレートデータを第2の撮像装置に送信し、第2の撮像装置に追尾対象を引き継ぐ技術が記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2017-204795号公報
特許第3814779号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1、2では、テンプレートマッチングにより追尾対象の被写体を判別しているため、複数の撮像装置により特定の被写体を追尾する場合、複数の撮像装置を撮影位置や撮影方向が近づくように配置する必要がある。そのため、複数の撮像装置の撮影位置や撮影方向を離して配置した場合、複数の撮像装置により特定の被写体を追尾することが困難となる。
【0007】
本発明は、上記課題に鑑みてなされ、その目的は、撮影位置や撮影方向が異なる複数の撮像装置により特定の被写体を追尾することが可能となるシステムを実現することである。
【課題を解決するための手段】
【0008】
上記課題を解決し、目的を達成するために、本発明は、撮影方向が異なる第1の撮像装置および第2の撮像装置と、前記第1の撮像装置により撮像された第1の画像または前記第2の撮像装置により撮像された第2の画像に基づいて所定の被写体を追尾するように前記第2の撮像装置を制御する第1の制御装置および第2の制御装置と、を含むシステムであって、前記第1の制御装置は、前記第1の画像に含まれる前記所定の被写体の第1の特徴情報を生成する第1の生成手段と、前記第1の特徴情報に基づいて前記所定の被写体を追尾するように前記第2の撮像装置を制御する第1の制御手段と、を有し、前記第2の制御装置は、前記第2の画像に含まれる被写体の第2の特徴情報を生成する第2の生成手段と、前記第1の制御装置により生成された前記第1の特徴情報と前記第2の生成手段により生成された前記第2の特徴情報とを比較する比較手段と、前記第2の特徴情報に基づいて前記所定の被写体を追尾するように前記第2の撮像装置を制御する第2の制御手段と、を有し、前記第1の特徴情報および前記第2の特徴情報は、撮影方向が異なる複数の撮像装置により同一の被写体が撮影されている場合に、同一の被写体であることが特定可能な情報であり、前記比較手段による比較の結果に基づいて、前記第1の特徴情報に基づいて前記所定の被写体を追尾するように前記第1の制御装置が前記第2の撮像装置を制御する第1の状態と、前記第2の特徴情報に基づいて前記所定の被写体を追尾するように前記第2の制御装置が前記第2の撮像装置を制御する第2の状態とを切り替える。
【発明の効果】
【0009】
本発明によれば、撮影位置や撮影方向が異なる複数の撮像装置により特定の被写体を追尾すること可能となる。
【図面の簡単な説明】
【0010】
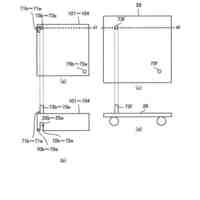
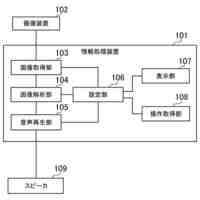
実施形態1のシステム構成を例示する図。
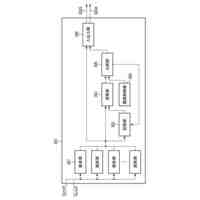
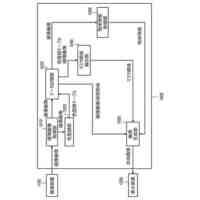
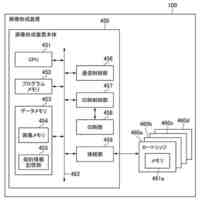
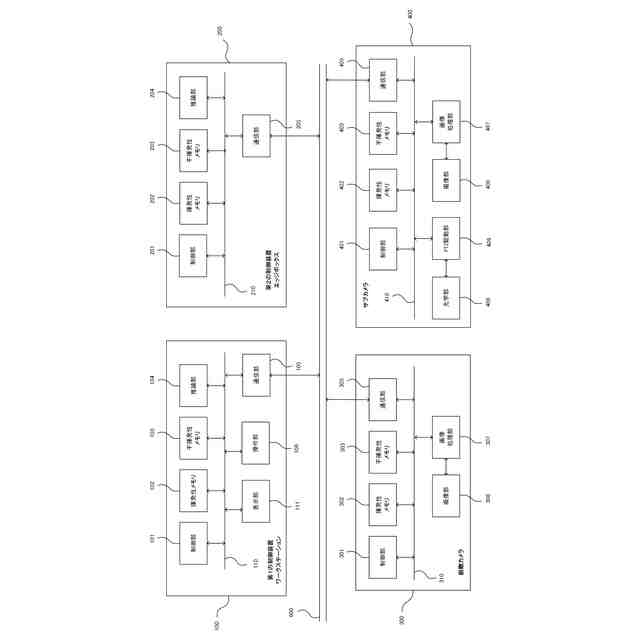
実施形態1のシステムを構成する装置のハードウェア構成を例示する図。
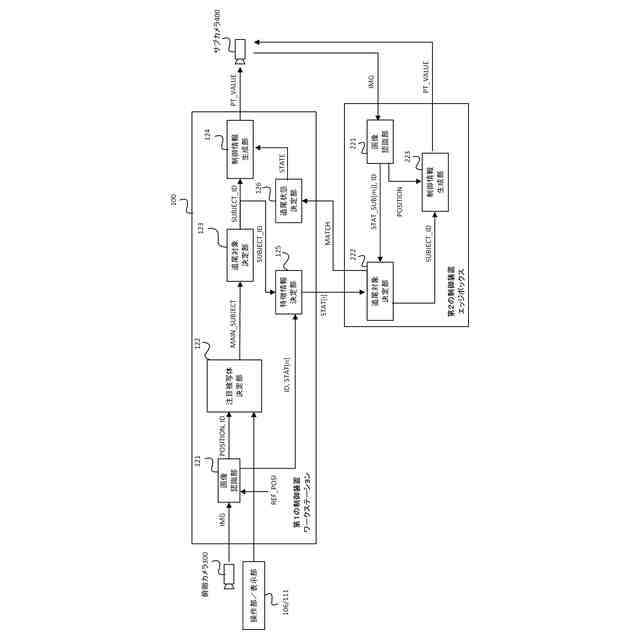
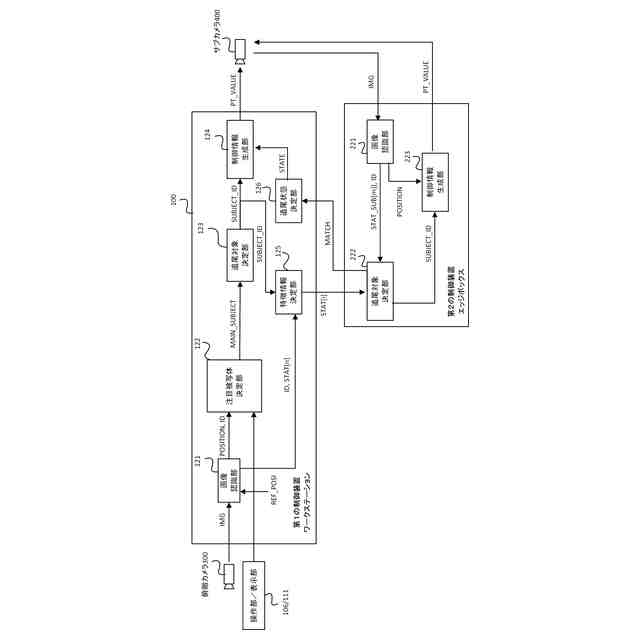
実施形態1のシステムを構成する装置の機能構成を例示する図。
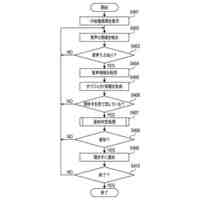
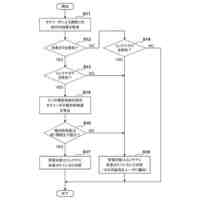
実施形態1のシステムを構成する装置の基本動作を例示するフローチャート。
実施形態1の撮影画像の座標変換方法を説明する図。
実施形態1の被写体検出方法と座標変換方法を説明する図。
実施形態1のパン制御を説明する図。
実施形態1のチルト制御を説明する図。
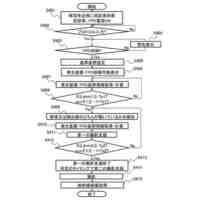
実施形態1の制御処理を例示するフローチャート。
実施形態1の追尾対象の被写体の決定方法を説明する図。
実施形態2のシステムを構成する装置の機能構成を例示する図。
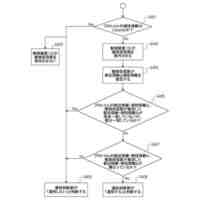
実施形態2の制御処理を例示するフローチャート。
実施形態2の制御処理を例示するフローチャート。
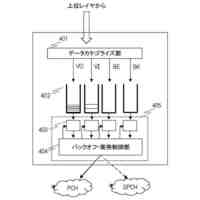
実施形態3のシステム構成を例示する図。
実施形態3の撮像装置に設定可能な役割と内容を例示する図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
電子機器
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
光電変換装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成システム
2日前
キヤノン株式会社
放射線撮影システム
3日前
キヤノン株式会社
画像記録装置及び制御方法
3日前
キヤノン株式会社
ズームレンズおよび撮像装置
2日前
キヤノン株式会社
レンズユニットおよび撮像装置
2日前
キヤノン株式会社
通信装置、制御方法、プログラム
3日前
キヤノン株式会社
光電変換装置及び光電変換システム
2日前
キヤノン株式会社
基板、分析方法、装置および製造方法
3日前
キヤノン株式会社
通信装置、通信方法、及びプログラム
3日前
キヤノン株式会社
記録装置、制御方法、およびプログラム
3日前
キヤノン株式会社
露光装置、物品の製造方法、及び露光方法
2日前
キヤノン株式会社
合金部材、機器および合金部材の製造方法
3日前
キヤノン株式会社
情報処理装置、情報処理方法、プログラム
2日前
キヤノン株式会社
画像処理方法、画像処理装置および撮像装置
2日前
キヤノン株式会社
レンズユニット、レンズ鏡筒および撮像装置
2日前
キヤノン株式会社
情報処理装置、情報処理方法、及びプログラム
2日前
キヤノン株式会社
画像処理装置、画像処理方法およびプログラム
3日前
キヤノン株式会社
異物検査装置、露光装置、及び物品の製造方法
2日前
キヤノン株式会社
画像処理装置、画像処理方法およびプログラム
3日前
キヤノン株式会社
画像処理装置、および、画像処理装置の学習方法
3日前
キヤノン株式会社
画像処理装置、撮像装置、制御方法及びプログラム
2日前
キヤノン株式会社
通信装置、通信装置の制御方法、およびプログラム
3日前
キヤノン株式会社
放射線撮影システム、その制御方法及びプログラム
2日前
キヤノン株式会社
多面鏡
9日前
キヤノン株式会社
画像処理装置、画像処理方法、プログラム及び記憶媒体
2日前
キヤノン株式会社
情報処理装置、制御方法、プログラム及び支援システム
2日前
キヤノン株式会社
画像処理装置、画像処理装置の制御方法およびプログラム
2日前
キヤノン株式会社
情報処理装置、情報処理装置の制御方法、およびプログラム
2日前
キヤノン株式会社
液体吐出ヘッド、液体吐出装置、液体吐出ヘッドの製造方法
2日前
キヤノン株式会社
ステータス管理システム、方法、プログラム及び情報処理装置
2日前
キヤノン株式会社
画像形成装置、その制御方法、プログラム、定額利用システム
2日前
キヤノン株式会社
インク組成物
2日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ