TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025009566
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023112653
出願日
2023-07-07
発明の名称
案内制御装置、案内制御方法、及び案内制御プログラム
出願人
株式会社デンソー
代理人
弁理士法人太陽国際特許事務所
主分類
G08G
1/005 20060101AFI20250110BHJP(信号)
要約
【課題】案内ロボットに案内されている人が案内ロボットから離脱した場合に、離脱したことに対応することができる案内制御装置、案内制御方法、及び案内制御プログラムを提供する。
【解決手段】案内制御装置は、人を案内する案内ロボット(20)と前記人が所持する携帯端末(50)との通信状態を取得する取得部(72)と、前記取得部によって取得された前記通信状態に基づいて、前記人が前記案内ロボットの通信範囲から離脱したか否かを判定する判定部(73)と、前記人が前記案内ロボットの通信範囲から離脱したと前記判定部によって判定された場合に、離脱データを出力する出力部(74)と、を備える。
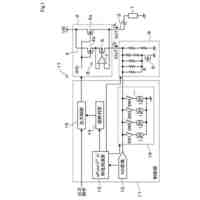
【選択図】図4
特許請求の範囲
【請求項1】
人を案内する案内ロボット(20)と前記人が所持する携帯端末(50)との通信状態を取得する取得部(72)と、
前記取得部によって取得された前記通信状態に基づいて、前記人が前記案内ロボットの通信範囲から離脱したか否かを判定する判定部(73)と、
前記人が前記案内ロボットの通信範囲から離脱したと前記判定部によって判定された場合に、離脱データを出力する出力部(74)と、
を備える案内制御装置(60)。
続きを表示(約 920 文字)
【請求項2】
前記判定部は、前記取得部によって取得された前記通信状態に基づいて、前記人が前記通信範囲の境界領域に存在するか否かを判定し、
前記出力部は、前記人が前記通信範囲の境界領域に存在すると前記判定部によって判定された場合に、警告データを出力する、
請求項1に記載の案内制御装置。
【請求項3】
前記案内ロボットは、複数の前記人を案内し、
前記案内制御装置は、複数の前記人の数に応じて前記通信範囲の広さを調整する調整部(71)をさらに備える、
請求項1に記載の案内制御装置。
【請求項4】
前記出力部は、前記携帯端末に対して前記離脱データを出力する、
請求項1に記載の案内制御装置。
【請求項5】
前記案内ロボットは、複数の前記人を案内し、
前記出力部は、複数の前記人のうち、前記通信範囲の内側に残存する残存者が所持する携帯端末に対して前記離脱データを出力する、
請求項1に記載の案内制御装置。
【請求項6】
前記出力部は、前記通信範囲から離脱した前記人としての離脱者を探索する探索装置(10、20B、30)に対して前記離脱データを出力する、
請求項1に記載の案内制御装置。
【請求項7】
前記探索装置は、前記通信範囲の外側に存在する別の案内ロボット(20B)を含む
請求項6に記載の案内制御装置。
【請求項8】
前記探索装置は、カメラ(30)を含む、
請求項6に記載の案内制御装置。
【請求項9】
前記探索装置は、前記通信範囲の外側に存在する別の案内ロボット、及び、カメラの少なくとも一方と通信可能に接続されたサーバ(10)を含む、
請求項6に記載の案内制御装置。
【請求項10】
前記出力部は、前記通信範囲から離脱した前記人としての離脱者が前記探索装置によって発見されていない場合に、ランドマークを表すランドマークデータを出力する、
請求項1に記載の案内制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、案内制御装置、案内制御方法、及び案内制御プログラムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特許文献1には、人間を先導して目的地まで案内する人間型の案内ロボットが開示されている。案内ロボットは、案内タスクを設定するタスク設定手段と、タスク設定手段に設定された案内タスクが不特定多数の人間を対象とするとき、体の向きを後ろ方向に向けた状態で移動するように制御する第1移動制御手段とを備える。
【先行技術文献】
【特許文献】
【0003】
特開2011-000656号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術では、案内ロボットに案内されている人が案内ロボットから離脱することが想定されていない。
【0005】
本開示は、一例として、案内ロボットに案内されている人が案内ロボットから離脱した場合に、離脱したことに対応することができる案内制御装置、案内制御方法、及び案内制御プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る案内制御装置は、人を案内する案内ロボット(20)と前記人が所持する携帯端末(50)との通信状態を取得する取得部(72)と、前記取得部によって取得された前記通信状態に基づいて、前記人が前記案内ロボットの通信範囲から離脱したか否かを判定する判定部(73)と、前記人が前記案内ロボットの通信範囲から離脱したと前記判定部によって判定された場合に、離脱データを出力する出力部(74)と、を備える。
【0007】
本開示に係る案内制御方法は、コンピュータが、人を案内する案内ロボット(20)と前記人が所持する携帯端末(50)との通信状態を取得すること、前記通信状態に基づいて、前記人が前記案内ロボットの通信範囲から離脱したか否かを判定すること、及び、前記人が前記案内ロボットの通信範囲から離脱したと判定した場合に、離脱データを出力することを含む処理を実行する方法である。
【0008】
本開示に係る案内制御プログラムは、コンピュータに、人を案内する案内ロボット(20)と前記人が所持する携帯端末(50)との通信状態を取得すること、前記通信状態に基づいて、前記人が前記案内ロボットの通信範囲から離脱したか否かを判定すること、及び、前記人が前記案内ロボットの通信範囲から離脱したと判定した場合に、離脱データを出力することを含む処理を実行させるためのプログラムである。
【発明の効果】
【0009】
本開示によれば、一例として、案内ロボットに案内されている人が案内ロボットから離脱した場合に、離脱したことに対応することができる案内制御装置、案内制御方法、及び案内制御プログラムが提供される。
【図面の簡単な説明】
【0010】
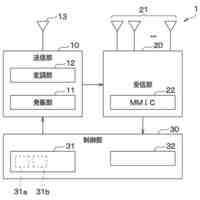
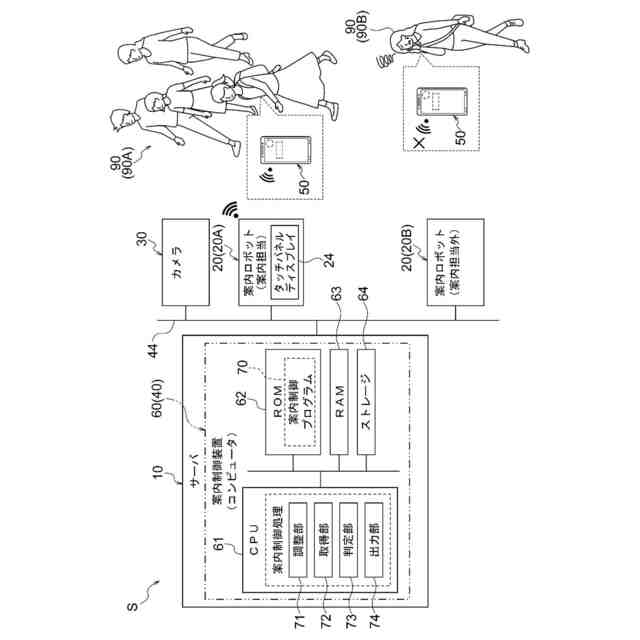
案内システムの一例を示す図である。
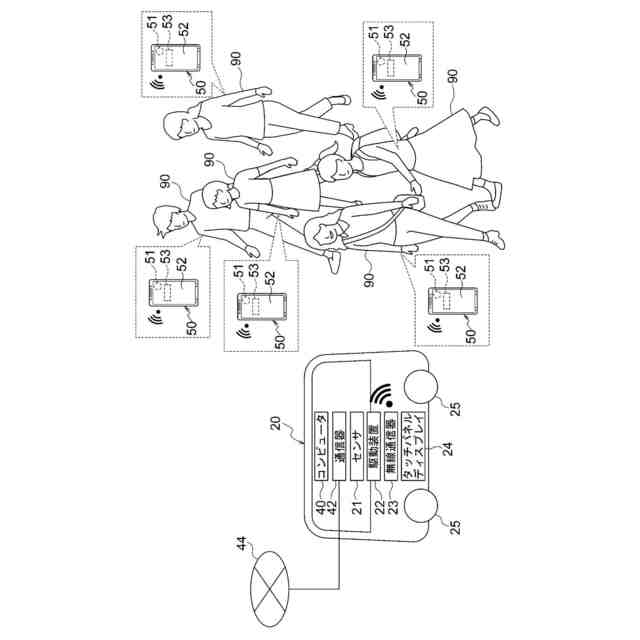
案内ロボットによって複数のメンバが案内されている様子の一例を示す図である。
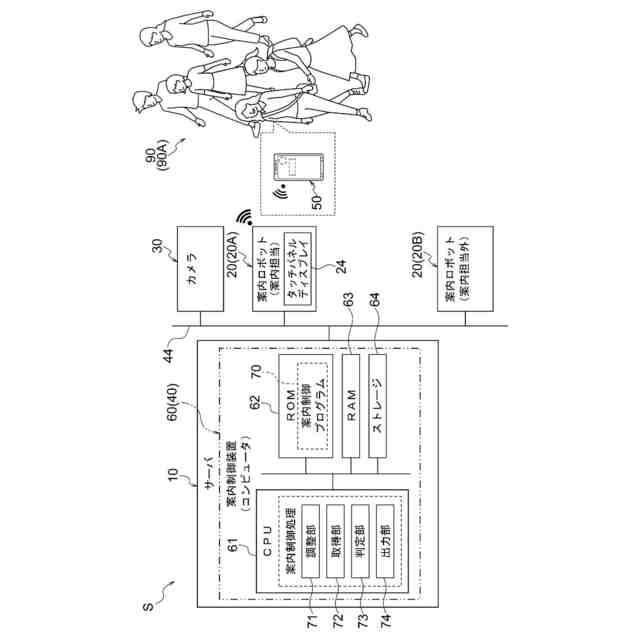
第1実施形態に係る案内制御装置が適用された案内システムを示す図であって、離脱メンバいない状態を示す図である。
第1実施形態に係る案内制御装置が適用された案内システムを示す図であって、離脱メンバいる状態を示す図である。
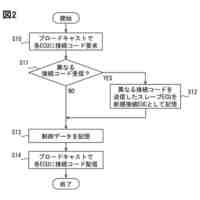
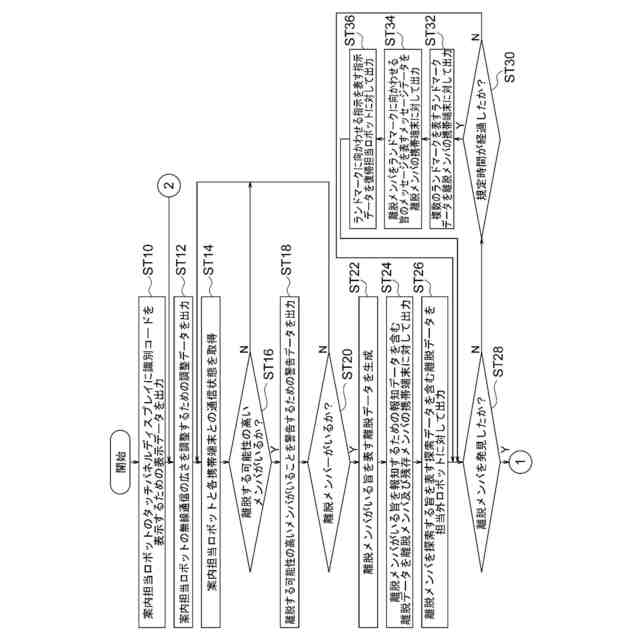
第1実施形態に係る案内制御処理の前半部分の流れを示すフローチャートである。
第1実施形態に係る案内制御処理の後半部分の流れを示すフローチャートである。
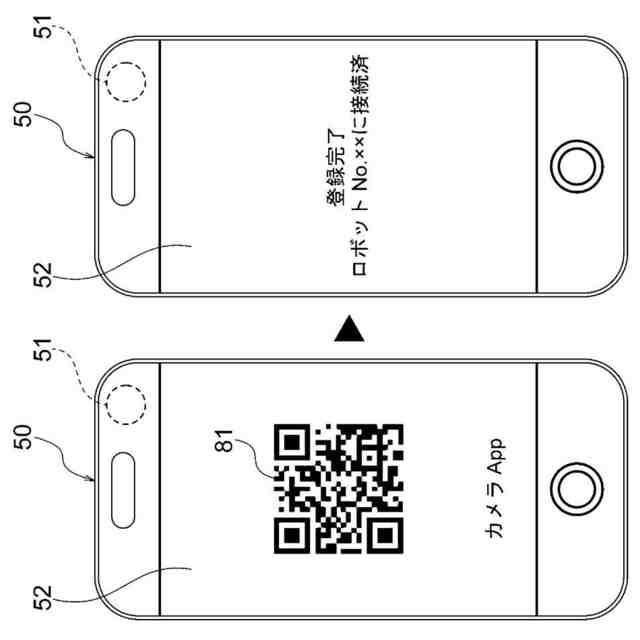
案内システムの利用を開始する場合に案内担当ロボットのタッチパネルディスプレイに表示される画像の一例を示す図である。
案内システムの利用を開始する場合に携帯端末のタッチパネルディスプレイに表示される画像の一例を示す図である。
通信範囲の境界領域に存在するメンバがいる場合に案内担当ロボットのタッチパネルディスプレイに表示される画像の一例を示す図である。
離脱メンバがいると判定された場合に案内担当ロボットのタッチパネルディスプレイに表示される画像の一例を示す図である。
離脱メンバがいると判定された場合に残存メンバの携帯端末のタッチパネルディスプレイに表示される画像の一例を示す図である。
離脱メンバがいると判定された場合に離脱メンバの携帯端末のタッチパネルディスプレイに表示される画像の一例を示す図である。
離脱メンバが発見された場合に残存メンバの携帯端末のタッチパネルディスプレイに表示される画像の一例を示す図である。
離脱メンバが複数のランドマークを選択する場合に残存メンバの携帯端末のタッチパネルディスプレイに表示される画像の一例を示す図である。
復帰担当ロボットがランドマークに向かっている場合に離脱メンバの携帯端末のタッチパネルディスプレイに表示される画像の一例を示す図である。
離脱メンバに複数のルートから一つのルートを選択させる場合に離脱メンバの携帯端末のタッチパネルディスプレイに表示される画像の一例を示す図である。
離脱メンバがルートを選択した場合に離脱メンバの携帯端末のタッチパネルディスプレイに表示される画像の一例を示す図である。
離脱メンバがルートを選択した場合に残存メンバの携帯端末のタッチパネルディスプレイに表示される画像の一例を示す図である。
第2実施形態に係る案内制御装置が適用された案内システムを示す図である。
離脱メンバがメインカメラによって発見された場合に離脱メンバの携帯端末のタッチパネルディスプレイに表示される画像の一例を示す図である。
第3実施形態に係る案内制御装置が適用された案内システムを示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
診断装置
3日前
株式会社デンソー
回転電機
3日前
株式会社デンソー
演算装置
3日前
株式会社デンソー
測距装置
3日前
株式会社デンソー
駆動回路
今日
株式会社デンソー
半導体装置
今日
株式会社デンソー
半導体装置
3日前
株式会社デンソー
レーダ装置
3日前
株式会社デンソー
レーダ装置
3日前
株式会社デンソー
レーダ装置
3日前
株式会社デンソー
半導体装置
3日前
株式会社デンソー
半導体装置
今日
株式会社デンソー
半導体装置
今日
株式会社デンソー
半導体装置
今日
株式会社デンソー
半導体装置
今日
株式会社デンソー
半導体装置
今日
株式会社デンソー
半導体装置
今日
株式会社デンソー
電力供給装置
3日前
株式会社デンソー
電力供給装置
3日前
株式会社デンソー
固定子ユニット
3日前
株式会社デンソー
バスバモジュール
3日前
株式会社デンソー
半導体モジュール
今日
株式会社デンソー
半導体モジュール
今日
株式会社デンソーウェーブ
空調コントローラ
今日
株式会社デンソー
巻線界磁型回転電機
今日
株式会社デンソー
巻線界磁型回転電機
今日
株式会社デンソー
二酸化炭素回収装置
今日
株式会社デンソー
デルタシグマ型変調器
今日
株式会社デンソー
デルタシグマ型変調器
今日
株式会社デンソー
ブリッジ回路の駆動装置
今日
株式会社デンソー
ブリッジ回路の駆動装置
今日
株式会社SOKEN
遮音部
今日
株式会社デンソー
方位推定装置、方位推定方法
今日
株式会社デンソーテン
情報処理装置及び情報処理方法
今日
株式会社デンソー
Al-AlN複合材料の製造方法
今日
株式会社デンソー
レゾルバの励磁装置及び励磁方法
3日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ