TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023165189
公報種別
公開特許公報(A)
公開日
2023-11-15
出願番号
2022075935
出願日
2022-05-02
発明の名称
搬送システム、制御装置、移動体、制御方法、プログラム、及び記憶媒体
出願人
株式会社東芝
代理人
弁理士法人iX
主分類
G05D
1/02 20200101AFI20231108BHJP(制御;調整)
要約
【課題】移動体による搬送対象の位置をより正確に得ることが可能な、搬送システム、制御装置、移動体、制御方法、プログラム、及び記憶媒体を提供する。
【解決手段】実施形態に係る搬送システムは、移動体、被検出体、及び第1検出部を備える。前記移動体は、走行し、対象物を搬送可能である。前記被検出体は、前記対象物に取り付けられ、前記移動体が走行する面を基準にして前記対象物よりも高い位置に設けられる。前記第1検出部は、前記面を基準として前記対象物よりも高い位置に設けられ、前記被検出体を検出する。
【選択図】図1
特許請求の範囲
【請求項1】
走行し、対象物を搬送可能な移動体と、
前記対象物に取り付けられ、前記移動体が走行する面を基準にして前記対象物よりも高い位置に設けられる被検出体と、
前記面を基準として前記対象物よりも高い位置に設けられ、前記被検出体を検出する第1検出部と、
を備えた搬送システム。
続きを表示(約 970 文字)
【請求項2】
前記第1検出部による前記被検出体の検出結果に基づき、前記移動体の走行を制御する制御装置をさらに備えた請求項1記載の搬送システム。
【請求項3】
前記制御装置は、検出された前記被検出体が取り付けられた前記対象物に向けて、前記移動体を走行させる、請求項2記載の搬送システム。
【請求項4】
前記移動体が別の前記対象物を搬送している場合、前記制御装置は、検出された前記被検出体が取り付けられた前記対象物に隣接する位置へ、前記移動体を走行させる、請求項2記載の搬送システム。
【請求項5】
前記制御装置は、検出された前記被検出体の位置を、地図上での前記対象物の停止位置と比較することで、前記被検出体の前記位置における前記対象物の有無を判定する、請求項2~4のいずれか1つに記載の搬送システム。
【請求項6】
前記移動体に取り付けられ、前記第1検出部よりも低い位置に設けられる第2検出部をさらに備え、
前記制御装置は、前記第1検出部及び前記第2検出部による検出結果から、前記対象物の位置及び姿勢を算出する、請求項2~4のいずれか1つに記載の搬送システム。
【請求項7】
複数の前記被検出体が前記対象物に取り付けられ、
前記制御装置は、前記第1検出部による前記複数の被検出体の検出結果に基づき、前記対象物の位置及び姿勢を算出する、請求項2~4のいずれか1つに記載の搬送システム。
【請求項8】
複数の前記被検出体が前記対象物に取り付けられ、
前記対象物は、開閉可能な扉を有し、
前記複数の被検出体の1つは前記扉に取り付けられ、
前記制御装置は、前記第1検出部による前記複数の被検出体の検出結果に基づき、前記扉の状態を算出する、請求項2~4のいずれか1つに記載の搬送システム。
【請求項9】
前記第1検出部は、前記移動体に取り付けられる、請求項1~4のいずれか1つに記載の搬送システム。
【請求項10】
前記被検出体は、人によって、搬送が決定された前記対象物に取り付けられる、請求項1~4のいずれか1つに記載の搬送システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、搬送システム、制御装置、移動体、制御方法、プログラム、及び記憶媒体に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
走行する移動体を用いて、物品を搬送させるシステムがある。このシステムについて、移動体による搬送対象の位置をより正確に得ることが可能な技術が求められている。
【先行技術文献】
【特許文献】
【0003】
特開2020-191008号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明が解決しようとする課題は、移動体による搬送対象の位置をより正確に得ることが可能な、搬送システム、制御装置、移動体、制御方法、プログラム、及び記憶媒体を提供することである。
【課題を解決するための手段】
【0005】
実施形態に係る搬送システムは、移動体、被検出体、及び第1検出部を備える。前記移動体は、走行し、対象物を搬送可能である。前記被検出体は、前記対象物に取り付けられ、前記移動体が走行する面を基準にして前記対象物よりも高い位置に設けられる。前記第1検出部は、前記面を基準として前記対象物よりも高い位置に設けられ、前記被検出体を検出する。
【図面の簡単な説明】
【0006】
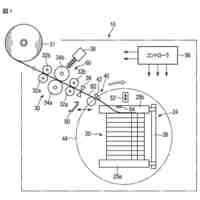
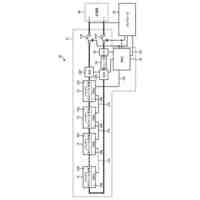
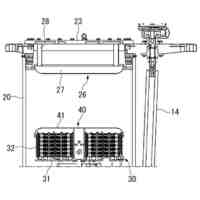
図1は、実施形態に係る移動体を示す斜視図である。
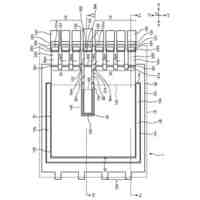
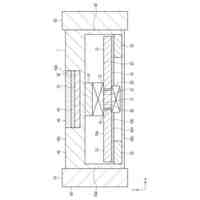
図2は、実施形態に係る移動体及び搬送対象物を示す側面図である。
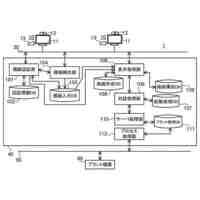
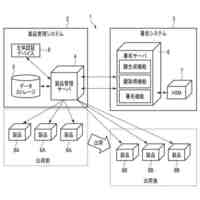
図3は、実施形態に係る搬送システムを示す模式図である。
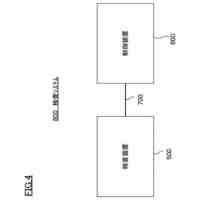
図4は、実施形態に係る搬送システムの適用例を示す模式図である。
図5(a)及び図5(b)は、実施形態に係る搬送システムの動作を示す模式図である。
図6(a)及び図6(b)は、実施形態に係る搬送システムの動作を示す模式図である。
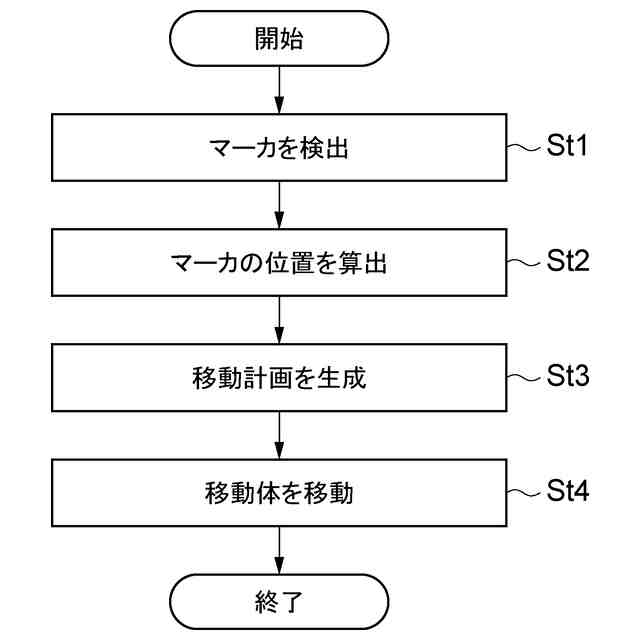
図7は、実施形態に係る制御方法を示すフローチャートである。
図8は、実施形態に係る搬送システムによる処理を説明するための模式図である。
図9は、実施形態に係る搬送システムによる処理を説明するための模式図である。
図10は、実施形態に係る搬送システムによる処理を説明するための模式図である。
図11は、実施形態に係る搬送システムによる処理を説明するための模式図である。
図12は、実施形態の第1変形例に係る移動体を示す斜視図である。
図13は、実施形態の第1変形例に係る搬送システムを示す模式図である。
図14は、実施形態の第2変形例に係る移動体を示す斜視図である。
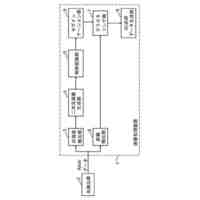
図15は、ハードウェア構成を表す模式図である。
【発明を実施するための形態】
【0007】
以下に、本発明の各実施形態について図面を参照しつつ説明する。
図面は模式的または概念的なものであり、各部分の厚みと幅との関係、部分間の大きさの比率などは、必ずしも現実のものと同一とは限らない。また、同じ部分を表す場合であっても、図面により互いの寸法や比率が異なって表される場合もある。
本願明細書と各図において、既に説明したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
【0008】
図1は、実施形態に係る移動体を示す斜視図である。
実施形態に係る移動体10は、床面を走行して移動し、物品を搬送可能である。図1に示すように、移動体10は、車体11、車輪12、リフタ13、筐体14、支持部材15、表示灯16、及び駆動制御部17を含む。
【0009】
車体11は、前後方向に延びた形状を有する。ここでは、移動体10の進行方向を「前方」とする。前方と反対の方向を「後方」とする。車輪12は、車体11の下面にそれぞれ設けられる。例えば、複数の車輪12は特殊車輪を用いた駆動輪であって、移動体10は全方向に走行する。車輪12は、不図示の駆動源、バッテリーなどにより駆動される。車輪12は、駆動輪及び従動輪を含み、移動体10は差動駆動方式により走行してもよい。車輪12はステアリングホイール等で構成されても良い。
【0010】
車体11は、平坦な上面11aを有する。車体11には、リフタ13が設けられる。リフタ13は、車体11に対して昇降可能である。リフタ13が上昇すると、リフタ13の平坦な上面が、車体11の上面に対して上方に移動する。筐体14は、直方体状であり、車体11の前方に設けられる。支持部材15は、筐体14の上に設けられ、上方に向けて延びている。図示した例では、支持部材15は、鉛直方向に延びる支柱15a及び水平方向に延びる支柱15bを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
回転子
8日前
株式会社東芝
センサ
1か月前
株式会社東芝
電源装置
4日前
株式会社東芝
開閉装置
1か月前
株式会社東芝
除去装置
1日前
株式会社東芝
結束装置
25日前
株式会社東芝
高周波回路
10日前
株式会社東芝
打込み治具
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
磁気記録装置
1か月前
株式会社東芝
超電導コイル
26日前
株式会社東芝
電源システム
4日前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
画像処理装置
4日前
株式会社東芝
膨れ検出装置
3日前
株式会社東芝
検査システム
1か月前
株式会社東芝
監視システム
26日前
株式会社東芝
電源システム
1日前
株式会社東芝
電力変換装置
19日前
株式会社東芝
電力補償装置
4日前
株式会社東芝
電子モジュール
1か月前
株式会社東芝
加速器システム
2か月前
株式会社東芝
レーダシステム
10日前
株式会社東芝
スラスト軸受装置
1か月前
株式会社東芝
半導体モジュール
1か月前
株式会社東芝
ダム管理システム
23日前
株式会社東芝
運転支援システム
4日前
株式会社東芝
ダイヤ修正支援装置
19日前
株式会社東芝
センサ及び電子装置
10日前
株式会社東芝
負荷時タップ切換器
1か月前
株式会社東芝
暗号鍵管理システム
1か月前
株式会社東芝
高周波バイアス回路
1か月前
株式会社東芝
フォトニックアセンブリ
2か月前
株式会社東芝
タービン動翼の固定構造
1か月前
株式会社東芝
光検出装置及び測距装置
1か月前
株式会社東芝
ゲートドライブ制御装置
19日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ