TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025130559
公報種別
公開特許公報(A)
公開日
2025-09-08
出願番号
2024027806
出願日
2024-02-27
発明の名称
ストリーミングデータを入力とする機械学習モデルの学習システム及び学習方法
出願人
株式会社日立製作所
代理人
弁理士法人サンネクスト国際特許事務所
主分類
G06N
20/00 20190101AFI20250901BHJP(計算;計数)
要約
【課題】不均衡ストリーミングデータを入力とする機械学習モデルの予測精度を維持する。
【解決手段】システムは、モデルに入力された不均衡ストリーミングデータにおけるデータ要素毎に、モデルから当該データ要素のクラス予測確率を受け、当該予測確率を基に、当該クラス予測確率に従うクラスの不確実性レベルを算出する。システムは、当該データ要素毎に、クラス毎に用意された不確実性範囲のうち、当該クラス予測確率に従うクラスに対応の不確実性範囲を特定し、当該不確実性レベルが、当該特定された不確実性範囲の外にあるか否かを判定し、当該判定の結果に応じて、当該データ要素についてのラベリング要求を発行する又は発行しない。システムは、発行されたラベリング要求に応答してラベル付けされたデータ要素から成るラベル付けデータセットを基に、モデルを学習する。
【選択図】図1
特許請求の範囲
【請求項1】
不確実性アナライザと学習モジュールとを有し、
前記不確実性アナライザは、機械学習モデルに入力された不均衡ストリーミングデータにおけるデータ要素毎に、
当該機械学習モデルから当該データ要素のクラス予測確率を受け、
当該クラス予測確率を基に、当該クラス予測確率に従うクラスの不確実性レベルを算出し、
前記学習モジュールは、当該データ要素毎に、
クラス毎に用意されており不確実性が高いと定義された範囲である不確実性範囲のうち、当該クラス予測確率に従うクラスに対応の不確実性範囲を特定し、
当該データ要素のクラスについて算出された不確実性レベルが、当該特定された不確実性範囲の外にあるか否かの判定である範囲判定を行い、
当該範囲判定の結果に応じて、当該データ要素についてのラベリング要求を発行し又は非発行とし、
前記学習モジュールは、発行されたラベリング要求に応答してラベル付けされたデータ要素から成るラベル付けデータセットを基に、前記機械学習モデルを学習する、
学習システム。
続きを表示(約 1,800 文字)
【請求項2】
前記範囲判定の結果が真であるデータ要素について、前記学習モジュールは、
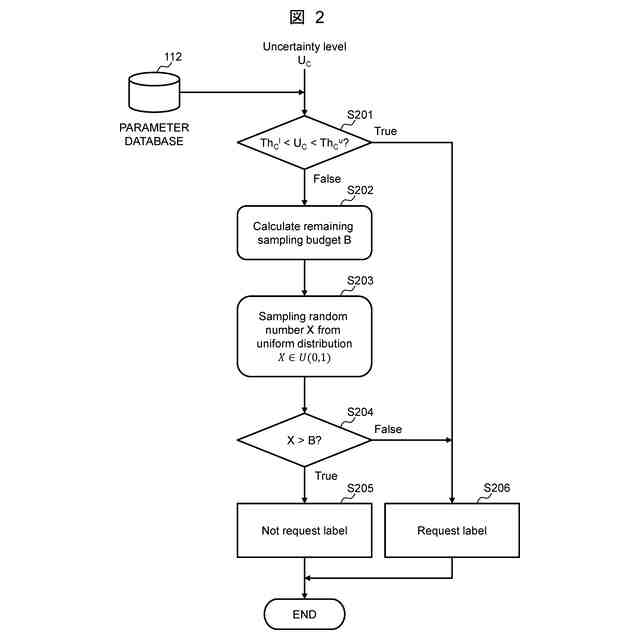
これまでのデータ要素の数に対するこれまで発行されたラベリング要求の数に基づき、閾値である残りサンプリング予算を計算し、
前記不確実性レベルが取り得る範囲からランダム値を取得し、
取得された前記ランダム値が前記残りサンプリング予算より大きいか否かの判定である予算判定を行い、
当該予算判定の結果が偽の場合に、当該データ要素のラベリング要求を発行する、
当該予算判定の結果が真の場合に、当該データ要素のラベリング要求を非発行とする、
請求項1に記載の学習システム。
【請求項3】
前記範囲判定の結果が偽であるデータ要素について、前記学習モジュールは、ラベリング要求を発行する、
請求項1に記載の学習システム。
【請求項4】
不確実性更新モジュールを更に備え、
クラス予測確率と一つ以上の判定閾値との大小関係に応じて予測されたクラスが定まり、
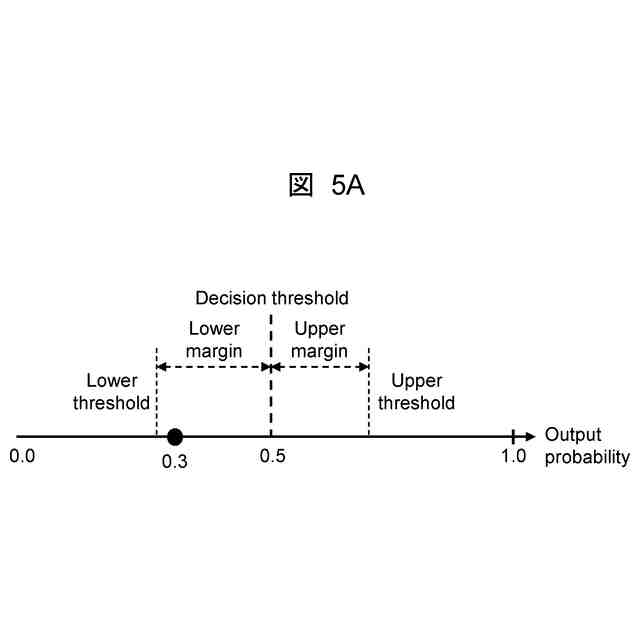
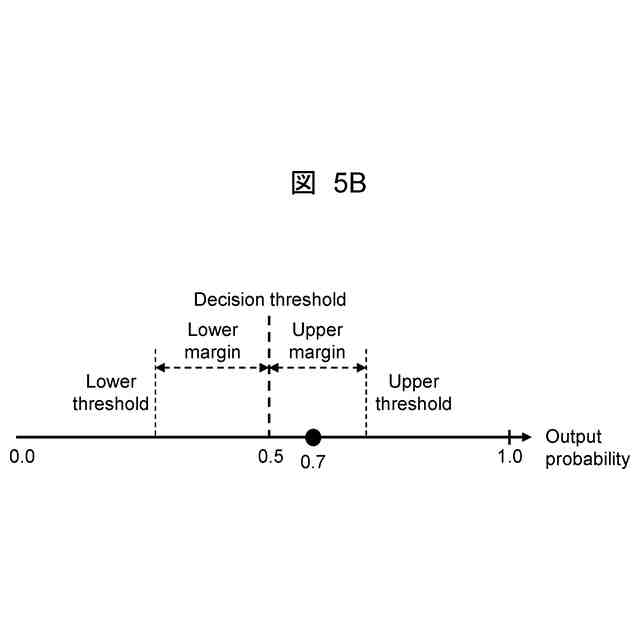
クラス毎に、前記不確実性範囲は、前記一つ以上の判定閾値を境界とする二つ以上の範囲である二つ以上のマージンを有し、
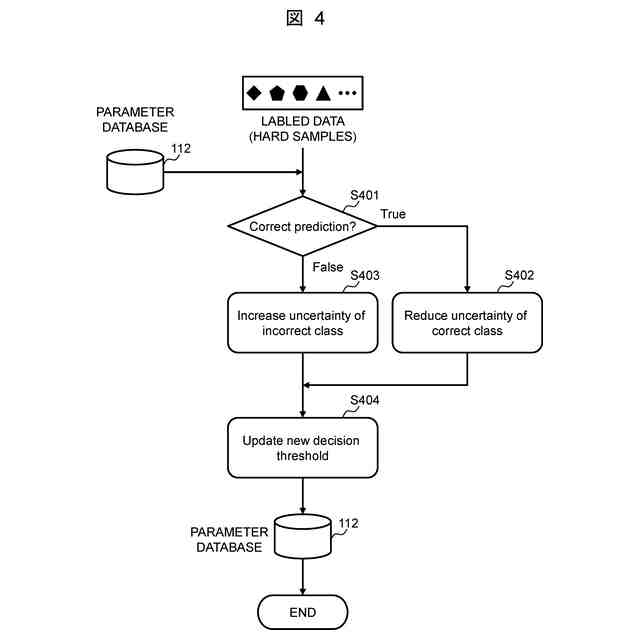
前記不確実性更新モジュールは、ラベリング要求に応答してクラスがラベル付けされたデータ要素毎に、
当該データ要素のクラス予測確率と前記一つ以上の判定閾値との大小関係に応じて定まる予測されたクラスが、ラベル付けされたクラスに一致するか否かの判定である正解判定を行い、
当該正解判定の結果が真の場合、前記予測されたクラスに対応の不確実性範囲を縮小し、
当該正解判定の結果が偽の場合、前記予測されたクラスに対応の不確実性範囲を拡大する、
請求項1に記載の学習システム。
【請求項5】
前記正解判定の結果が真の場合、前記不確実性更新モジュールは、前記予測されたクラスに対応の不確実性範囲のうち、当該クラス予測確率が属するマージンを縮小し、
前記正解判定の結果が偽の場合、前記不確実性更新モジュールは、前記予測されたクラスに対応の不確実性範囲のうち、当該クラス予測確率が属するマージンを拡大する、
請求項4に記載の学習システム。
【請求項6】
不確実性パラメータエスティメータを備え、
前記不確実性パラメータエスティメータは、クラスの予測難易度を表すデータに基づき、当該クラスの予測難易度が高いほど、当該クラスの不確実性範囲が大きく推定し、
クラスの不確実性範囲は、推定された不確実性範囲である、
請求項1に記載の学習システム。
【請求項7】
不確実性パラメータエスティメータを備え、
前記不確実性パラメータエスティメータは、クラスのランクを表すデータに基づき、当該ランクが高い程、不確実性範囲を大きく推定する、
クラスの不確実性範囲は、推定された不確実性範囲である、
請求項1に記載の学習システム。
【請求項8】
不確実性パラメータエスティメータを備え、
前記不確実性パラメータエスティメータは、クラスの割合の分布を表すデータを含み、当該分布を基に、不確実性範囲を推定する、
クラスの不確実性範囲は、推定された不確実性範囲である、
請求項1に記載の学習システム。
【請求項9】
機械学習モデルに入力された不均衡ストリーミングデータにおけるデータ要素毎に、
当該機械学習モデルから当該データ要素のクラス予測確率を受け、
当該クラス予測確率を基に、当該クラス予測確率に従うクラスの不確実性レベルを算出し、
当該データ要素毎に、
クラス毎に用意されており不確実性が高いと定義された範囲である不確実性範囲のうち、当該クラス予測確率に従うクラスに対応の不確実性範囲を特定し、
当該データ要素のクラスについて算出された不確実性レベルが、当該特定された不確実性範囲の外にあるか否かの判定である範囲判定を行い、
当該範囲判定の結果に応じて、当該データ要素についてのラベリング要求を発行し又は非発行とし、
発行されたラベリング要求に応答してラベル付けされたデータ要素から成るラベル付けデータセットを基に、前記機械学習モデルを学習する、
ことをコンピュータにより行う学習方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、概して、ストリーミングデータを入力とする機械学習モデルの学習に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
機械学習モデルの処理に関し、例えば、特許文献1及び2に開示の技術、並びに、非特許文献1に開示の技術が知られている。
【先行技術文献】
【特許文献】
【0003】
JP2022-184272
WO2008/047835
【非特許文献】
【0004】
Liu, Weike, et al. “A comprehensive active learning method for multiclass imbalanced data streams with concept drift.”.Knowledge-Based Systems 215 (2021):106778.
【発明の概要】
【発明が解決しようとする課題】
【0005】
ストリーミングデータを入力とする機械学習モデルから、ストリーミングデータにおけるデータ要素毎の予測の結果が出力される。
【0006】
クラスが不均衡なデータである不均衡データが知られている。不均衡データとしてのストリーミングデータ、つまり、不均衡ストリーミングデータがある。不均衡ストリーミングデータが入力される機械学習モデルの予測精度は、下記(a)及び(b)のうちの少なくとも一つを理由に低下し得る。
(a)機械学習モデルを用いた検出の対象データ(例えば、不良品のデータ)の低い存在可能性。
(b)ストリーミングデータのデータソース(例えば監視カメラやセンサ)の劣化や交換等により発生し得るコンセプトドリフト。
【0007】
このような課題を解決する技術は、特許文献1及び2、並びに、非特許文献1のいずれにも開示も示唆もされていない。
【課題を解決するための手段】
【0008】
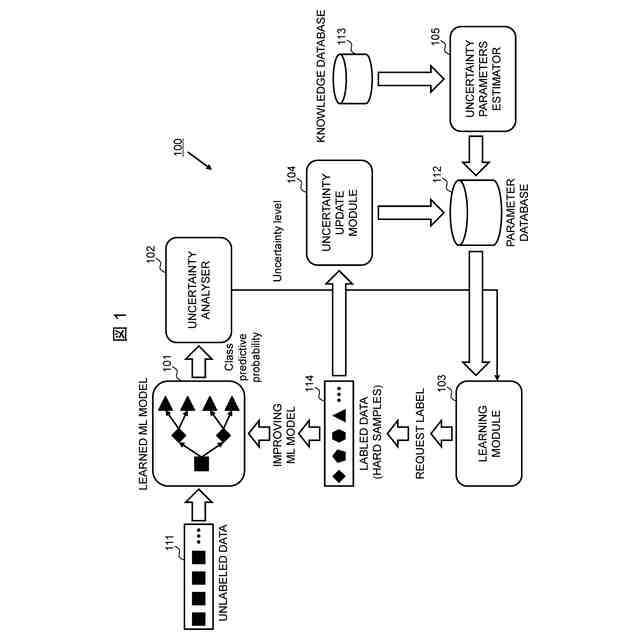
学習システムは、機械学習モデルに入力された不均衡ストリーミングデータにおけるデータ要素毎に、当該機械学習モデルから当該データ要素のクラス予測確率を受け、当該予測確率を基に、当該クラス予測確率に従うクラスの不確実性レベルを算出する。学習システムは、当該データ要素毎に、クラス毎に用意されており不確実性が高いと定義された範囲である不確実性範囲のうち、当該クラス予測確率に従うクラスに対応の不確実性範囲を特定し、当該不確実性レベルが、当該特定された不確実性範囲の外にあるか否かの判定である範囲判定を行い、当該範囲判定の結果に応じて、当該データ要素についてのラベリング要求を発行する又は発行しない。学習システムは、発行されたラベリング要求に応答してラベル付けされたデータ要素から成るラベル付けデータセットを基に、機械学習モデルを学習する。
【発明の効果】
【0009】
本発明によれば、不均衡ストリーミングデータを入力とする機械学習モデルの予測精度を維持することができる。上記した以外の課題、構成および効果は、以下の発明を実施するための形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
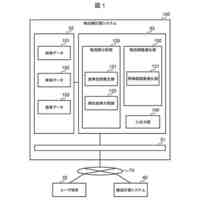
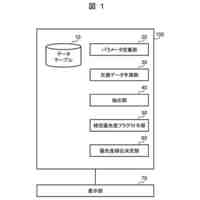
実施形態に係るデータ処理システムの概要を示す。
学習モジュールが行う処理の流れを示す。
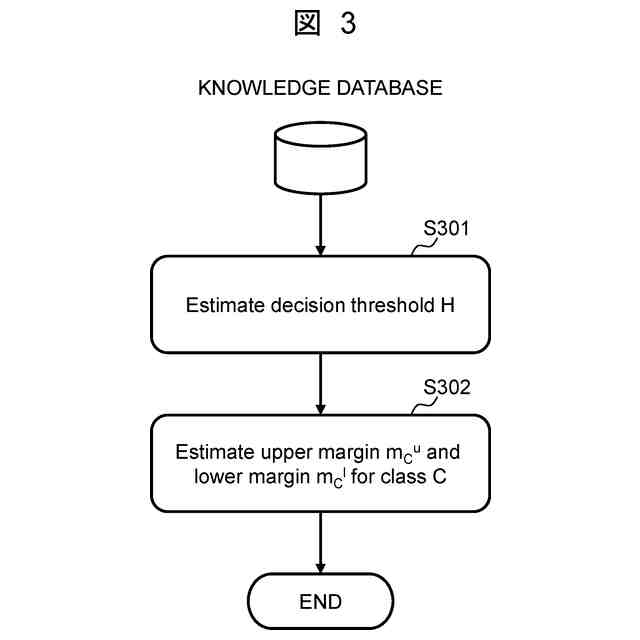
不確実性パラメータエスティメータが行う処理の流れを示す。
不確実性更新モジュールが行う処理の流れを示す。
クラス予測確率が不確実性範囲のうちの下位マージンに属する例を示す。
クラス予測確率が不確実性範囲のうちの上位マージンに属する例を示す。
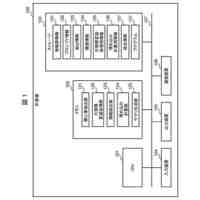
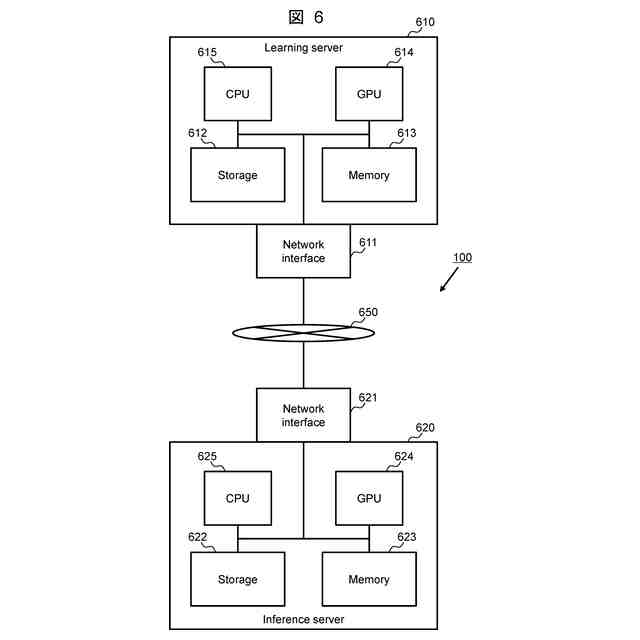
データ処理システムのハードウェア構成の例を示す。
図6に示したシステムでの学習と推論の概要を示す。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立製作所
制御装置
15日前
株式会社日立製作所
レール把持装置
12日前
株式会社日立製作所
電動機制御装置
22日前
株式会社日立製作所
環境評価システム
17日前
株式会社日立製作所
機能割付システム
29日前
株式会社日立製作所
航空機用の推進装置
22日前
株式会社日立製作所
沿岸環境監視システム
22日前
株式会社日立製作所
欠陥知識循環システム
2日前
株式会社日立製作所
受診支援装置および方法
11日前
株式会社日立製作所
直動接点および巻線切替装置
10日前
株式会社日立製作所
対話システムおよび対話方法
11日前
株式会社日立製作所
人物特性推定システム及び方法
3日前
株式会社日立製作所
搬送制御装置及び搬送制御方法
11日前
株式会社日立製作所
設計支援装置および設計支援方法
12日前
株式会社日立製作所
情報処理システム、情報処理方法
10日前
株式会社日立製作所
再エネ調達手段選定支援システム
10日前
株式会社日立製作所
障害対応システム及び障害対応方法
2日前
株式会社日立製作所
ログ抽出方法及びログ抽出システム
4日前
株式会社日立製作所
情報処理システム及び情報処理方法
15日前
株式会社日立製作所
情報抽出システム及び情報抽出方法
18日前
株式会社日立製作所
情報処理システム及び情報処理方法
25日前
株式会社日立製作所
ワークフロー作成支援装置及び方法
11日前
株式会社日立製作所
行動解析システム、及び行動解析方法
29日前
株式会社日立製作所
図面整合システムおよび図面整合方法
5日前
株式会社日立製作所
水電解システム及び絶縁配管の保守方法
16日前
株式会社日立製作所
管理装置、管理方法、及び制御システム
15日前
株式会社日立製作所
鉄道システムおよび鉄道車両の制御方法
4日前
株式会社日立製作所
物流網計画システムおよび物流網計画方法
18日前
株式会社日立製作所
サービス提供方法調整システムおよび方法
24日前
株式会社日立製作所
水素製造計画装置および水素製造システム
10日前
株式会社日立製作所
プロトコル分析装置及びプロトコル分析方法
19日前
株式会社日立製作所
ガイドレール取り付け方法及び接続クランプ
24日前
株式会社日立製作所
計算機システム及びパラメータ探索支援方法
25日前
株式会社日立製作所
欠損データ補完装置及び欠損データ補完方法
16日前
株式会社日立製作所
寸法計測管理システム及び寸法計測管理方法
8日前
株式会社日立製作所
電力系統安定化装置および電力系統安定化方法
23日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ