TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025126713
公報種別
公開特許公報(A)
公開日
2025-08-29
出願番号
2024023098
出願日
2024-02-19
発明の名称
振動体の実装構造および慣性センサ
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人ゆうあい特許事務所
主分類
G01C
19/5691 20120101AFI20250822BHJP(測定;試験)
要約
【課題】アライメントのズレに起因する振動体と複数の電極部との接触抑制が可能な実装構造およびこれを用いた慣性センサを提供する。
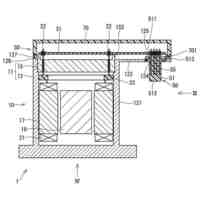
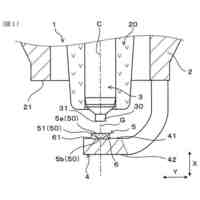
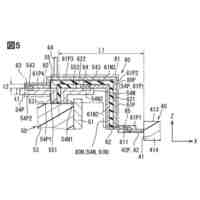
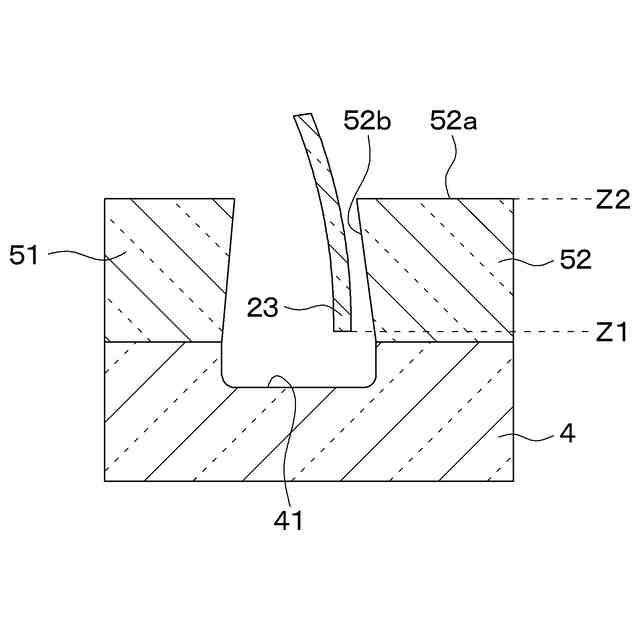
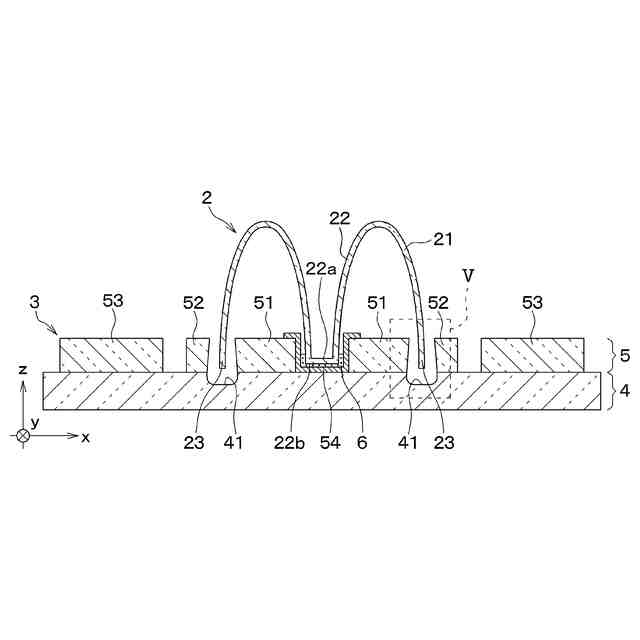
【解決手段】振動体が実装基板に実装された実装構造は、実装基板が振動体のリム23と距離を隔てて対向する複数の電極部52を有する。電極部52のうちリム23と対向する対向面52bは、少なくとも一部が、実装基板のなす平面に対する法線方向に対して傾斜している。振動体のリム23の最大径を振動体最大径とし、複数の電極部52のうち実装基板のなす平面において実装中心を軸とする径方向に沿って対向する2つの電極部を結ぶ直線の長さを電極径とする。このとき、対向面52bは、電極径が最小となる電極最小径の高さ位置Z2が、振動体最大径の高さ位置Z1とは異なる形状となっている。また、上記の実装構造を有する慣性センサとする。
【選択図】図5
特許請求の範囲
【請求項1】
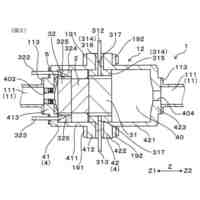
振動体(2)が実装基板(3)に実装されてなる実装構造であって、
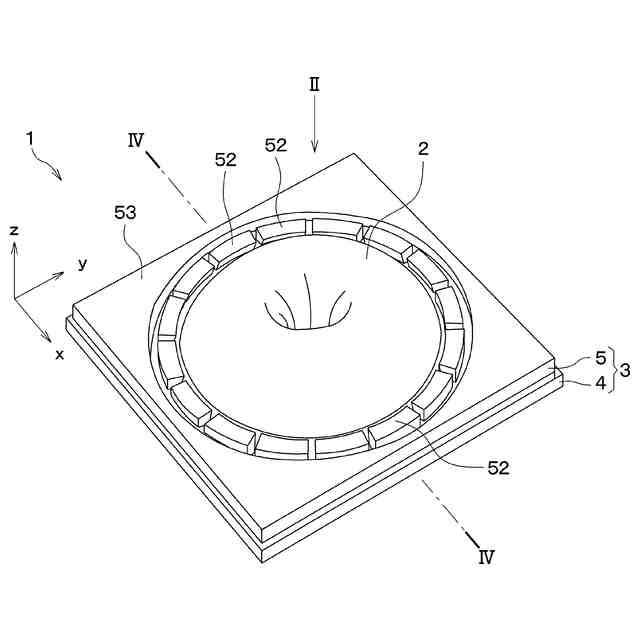
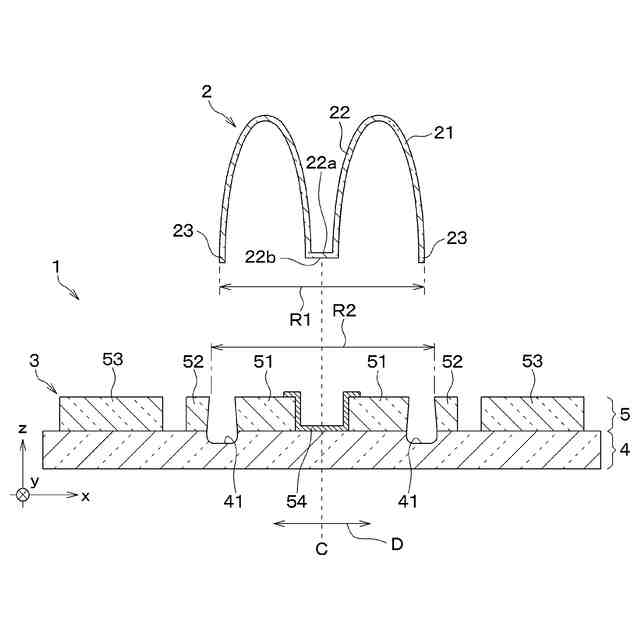
前記振動体は、三次元曲面を有する曲面部(21)と、前記曲面部から前記曲面部の内側中心に延設された接続部(22)とを有し、
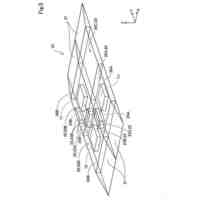
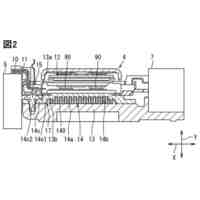
前記実装基板は、前記接続部が接合される部位を囲む位置に配置され、前記曲面部のうち前記接続部とは反対側の端部のリム(23)と距離を隔てて対向する複数の電極部(52)を有し、
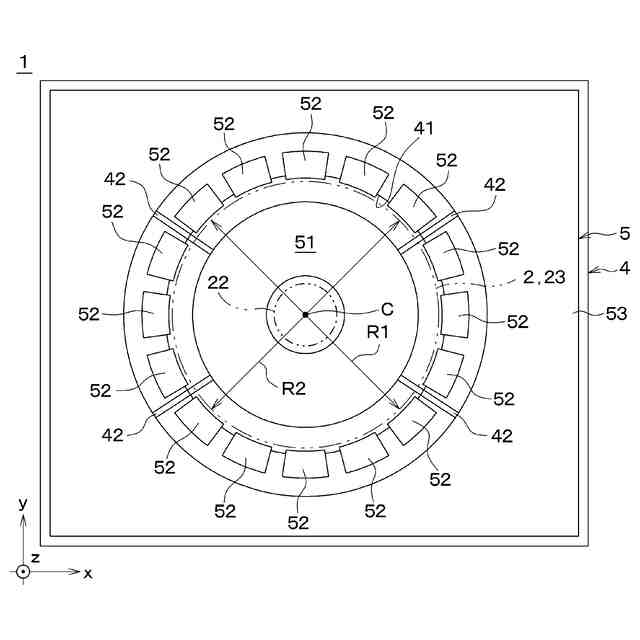
前記実装基板のうち前記接続部の実装面(22b)の中心直下に位置する点を実装中心(C)とし、前記実装基板のなす平面のうち前記実装中心を軸とする径方向を基板径方向(D)とし、前記基板径方向に沿って対向する2つの前記電極部を結ぶ直線の長さを電極径とし、前記平面に対する法線方向における位置を高さ位置として、
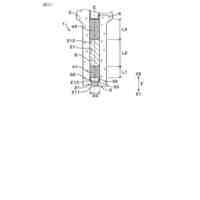
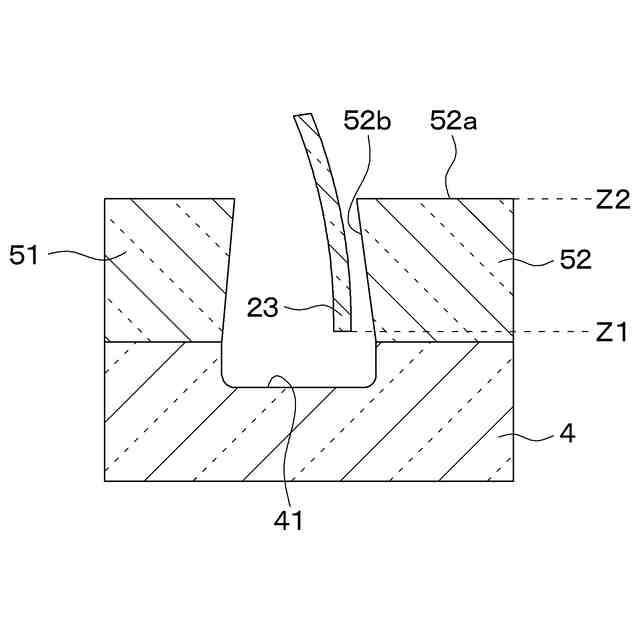
複数の前記電極部は、前記リムと対向する対向面(52b)の少なくとも一部が前記法線方向に対して傾斜しており、前記電極径が最小となる電極最小径(R2)の高さ位置(Z2)が、前記リムの直径が最大となる振動体最大径(R1)の高さ位置(Z1)とは異なっている、実装構造。
続きを表示(約 480 文字)
【請求項2】
複数の前記電極部は、前記対向面の少なくとも一部が前記リムから遠ざかる逆テーパ形状で傾斜している、請求項1に記載の実装構造。
【請求項3】
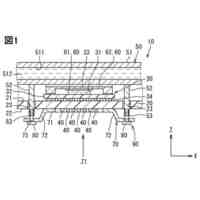
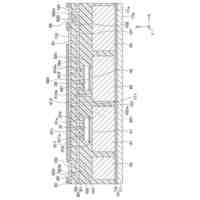
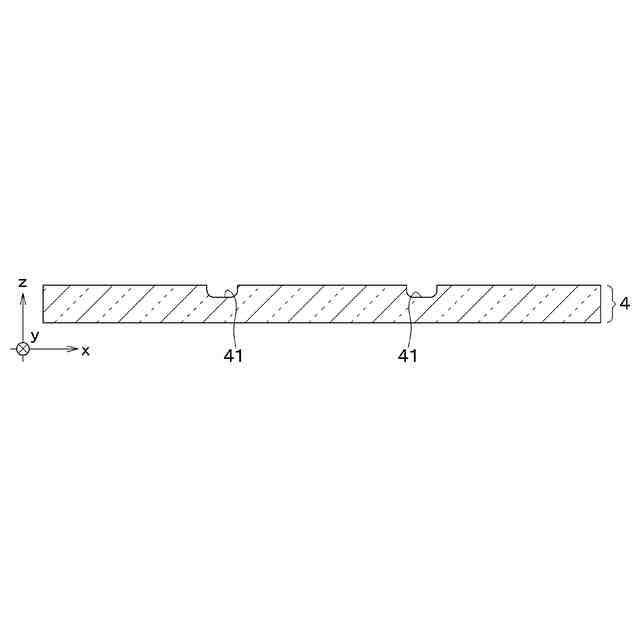
前記実装基板は、下部基板(4)と、上部基板(5)とを有し、前記下部基板に前記上部基板が接合されており、
複数の前記電極部は、前記上部基板の一部であるとともに、前記対向面のうち前記下部基板とは反対側の上端から所定の一部の領域が前記リムから遠ざかる逆テーパ形状で傾斜している、請求項2に記載の実装構造。
【請求項4】
前記実装基板は、下部基板(4)と、上部基板(5)とを有し、前記下部基板に前記上部基板が接合されており、
複数の前記電極部は、前記上部基板の一部であるとともに、前記対向面のうち前記下部基板とは反対側の上端から所定の一部の領域が前記リムに近づく順テーパ形状で傾斜し、残部の領域が前記リムから遠ざかる逆テーパ形状で傾斜している、請求項2に記載の実装構造。
【請求項5】
請求項1ないし4のいずれか1つに記載の実装構造を備える慣性センサ。
発明の詳細な説明
【技術分野】
【0001】
本開示は、三次元曲面を有する振動体が実装基板に実装された実装構造およびこれを用いた慣性センサに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、三次元曲面を有する振動体が複数の電極を有する実装基板に実装された実装構造を有する慣性センサが知られている(例えば特許文献1)。特許文献1に記載の慣性センサは、ワイングラスモードで振動する略半球形状の三次元曲面を有する振動体を有し、実装基板に形成され、互いに独立する複数の電極が当該振動体と距離を隔てつつ、振動体との距離が等しくなるように配置されたBRGである。BRGとは、Bird-bath Resonator Gyroscopeの略称である。この慣性センサは、振動体における振動の状態を表すQ値が10
6
以上に達する構造であるため、従来よりも高精度が見込まれる。
【先行技術文献】
【特許文献】
【0003】
米国特許出願公開第2019/0094024号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
この種の慣性センサは、振動体の半球状部位のうち実装基板に接合される部分とは反対側に位置する端部とこれと対向する電極との間における静電容量に基づき、振動体の駆動および印加された物理量の検出を行う。この種の慣性センサは、振動体とこれと対向する複数の電極との距離、すなわち電極間ギャップを狭く、かつ均一にすることで性能が確保されるため、振動体を実装基板の複数の電極に実装する際に、高精度の位置制御が必要となる。
【0005】
半球状形状を有する振動体は、振動のQ値を高くする観点からアライメントマークを付すことが好ましくない。アライメントマークのない振動体は、例えば、カメラ等の撮像装置による外形認識がなされた後に、認識された外形の情報に基づいてフリップチップ実装により実装基板に組付けられる。しかしながら、この方法は、アライメント精度が低いため、振動体と実装基板の電極とが接触し、短絡や振動体の振動不良が生じ、歩留まり低下の要因となりうる。
【0006】
特許文献1に記載の実装構造は、半球状形状を有する振動体を実装基板に搭載した後、振動体とこれに対向する複数の電極との間にこれらを一時的に繋ぐ犠牲層を設け、犠牲層の一部をエッチングして分離する工程を経て得られる。また、この実装構造は、実装基板に予め振動体の位置調整用のバネ構造を形成しておき、振動体を実装基板に搭載した後に当該バネ構造を用いて振動体と複数の電極との距離が略同一となるように位置調整を行うことでも得られる。
【0007】
しかしながら、上記の製造方法は、振動体を実装基板に接合した後に、振動体と複数の電極とが直に接触することが抑制され、歩留まり低下を抑制できる一方、犠牲層またはバネ構造の除去工程が必要となるため、時間を要する上、製造コストが増大してしまう。
【0008】
本開示は、上記の点に鑑み、振動体と実装基板とのアライメントずれが生じた場合であっても、実装基板に実装された振動体と複数の電極との接触を抑制し、歩留まり低下を抑制可能な振動体の実装構造およびこれを用いた慣性センサを提供することを目的とする。
【課題を解決するための手段】
【0009】
本開示の1つの観点によれば、振動体の実装構造は、
振動体(2)が実装基板(3)に実装されてなる実装構造であって、
振動体は、三次元曲面を有する曲面部(21)と、曲面部から曲面部の内側中心に延設された接続部(22)とを有し、
実装基板は、接続部が接合される部位を囲む位置に配置され、曲面部のうち接続部とは反対側の端部のリム(23)と距離を隔てて対向する複数の電極部(52)を有し、
実装基板のうち接続部の実装面(22b)の中心直下に位置する点を実装中心(C)とし、実装基板のなす平面のうち実装中心を軸とする径方向を基板径方向(D)とし、基板径方向に沿って対向する2つの電極部を結ぶ直線の長さを電極径とし、平面に対する法線方向における位置を高さ位置として、
複数の電極部は、リムと対向する対向面(52b)の少なくとも一部が法線方向に対して傾斜しており、電極径が最小となる電極最小径(R2)の高さ位置(Z2)が、リムの直径が最大となる振動体最大径(R1)の高さ位置(Z1)とは異なっている。
【0010】
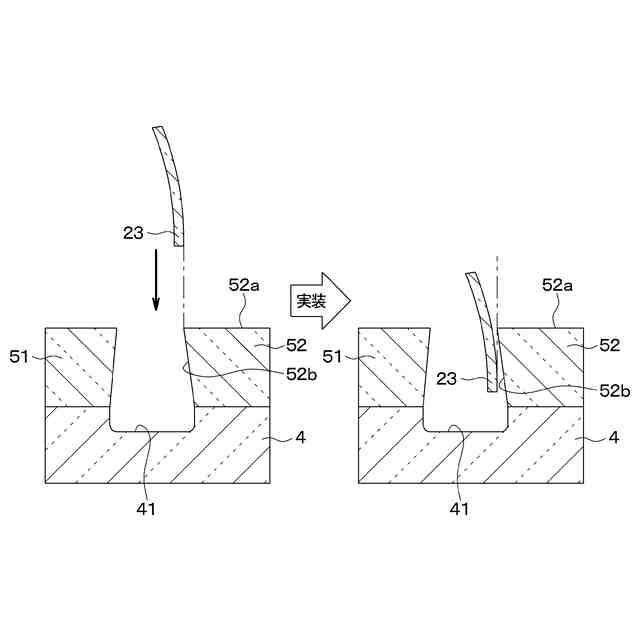
この実装構造は、三次元曲面の曲面部と接続部とを有する振動体が複数の電極部を有する実装基板に実装されてなり、複数の電極のうち振動体の曲面部の端部のリムと対向する対向面の少なくとも一部が実装基板のなす平面に対する法線方向において傾斜している。そして、当該法線方向における位置を高さ位置として、実装構造は、振動体のリムにおける直径が最大となる振動体最大径の高さ位置と、基板径方向Dに沿って対向する2つの電極部を結ぶ直線の長さである径が最小となる電極最小径の高さ位置とが異なる。これにより、振動体を実装基板に搭載した後に、振動体のリムと実装基板の複数の電極部との隙間が確保され、振動体の位置合わせにズレが生じたとしても、リムと電極部との接触が抑制され、歩留まり低下が抑制される実装構造となる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソー
携帯機
22日前
株式会社デンソー
通信装置
29日前
株式会社デンソー
電子装置
8日前
株式会社デンソー
送電装置
11日前
株式会社デンソー
ステータ
15日前
株式会社デンソー
電子装置
15日前
株式会社デンソー
電子装置
11日前
株式会社デンソー
電子装置
26日前
株式会社デンソー
駆動装置
25日前
株式会社デンソー
駆動装置
25日前
株式会社デンソー
圧電素子
24日前
株式会社デンソー
電子機器
22日前
株式会社デンソー
ステータ
10日前
株式会社デンソー
測距装置
1日前
株式会社デンソーウェーブ
携帯端末
17日前
株式会社デンソー
光学部材
29日前
株式会社デンソー
レーダ装置
8日前
株式会社デンソー
半導体装置
11日前
株式会社デンソー
熱音響装置
15日前
株式会社デンソー
半導体装置
18日前
株式会社デンソー
点火プラグ
10日前
株式会社デンソー
電子制御装置
8日前
株式会社デンソー
小型電動車両
4日前
株式会社デンソー
特性補償回路
23日前
株式会社デンソー
電力変換装置
26日前
株式会社デンソー
中継システム
1日前
株式会社デンソーテン
電源制御装置
18日前
株式会社デンソーウェーブ
情報読取端末
4日前
株式会社デンソーウェーブ
光学読取装置
18日前
株式会社デンソーウェーブ
無線通信装置
1か月前
株式会社デンソー
アクセル装置
16日前
株式会社デンソー
電力変換装置
2日前
株式会社デンソー
電子制御装置
18日前
株式会社デンソー
電子制御装置
10日前
株式会社デンソー
電力変換装置
4日前
株式会社デンソー
スパークプラグ
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ