TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025125927
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024022205
出願日
2024-02-16
発明の名称
モータ制御装置
出願人
株式会社ジェイテクト
代理人
弁理士法人あい特許事務所
主分類
H02P
27/06 20060101AFI20250821BHJP(電力の発電,変換,配電)
要約
【課題】負荷オブザーバが負荷を正確に推定できるようになるモータ制御装置を提供する。
【解決手段】操舵系にトルクを付与する電動モータの巻線、駆動回路および制御部が複数系統化されたシステムに適用されるモータ制御装置であって、各系統の前記制御部は、互いに通信が可能であり、各系統内の制御部は、電流またはトルクに関するフィードバック値を用いて、操舵系に作用する負荷を推定する負荷オブザーバと、当該系統内の負荷オブザーバによって推定された負荷を用いて、全系統内の駆動回路のうち少なくとも当該系統内の駆動回路を駆動するための指令値を演算する演算部とを含み、通常時には、各系統のフィードバック値は、全ての系統の巻線に流れる電流の総和に応じたフィードバック値に基づいて演算される。
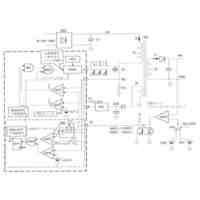
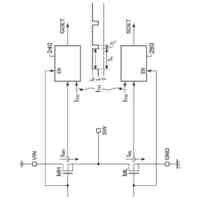
【選択図】図3
特許請求の範囲
【請求項1】
操舵系にトルクを付与する電動モータの巻線、駆動回路および制御部が複数系統化されたシステムに適用されるモータ制御装置であって、
各系統の前記制御部は、互いに通信が可能であり、
各系統内の前記制御部は、電流またはトルクに関するフィードバック値を用いて、前記操舵系に作用する負荷を推定する負荷オブザーバと、当該系統内の前記負荷オブザーバによって推定された負荷を用いて、全系統内の前記駆動回路のうち少なくとも当該系統内の前記駆動回路を駆動するための指令値を演算する演算部とを含み、
通常時には、前記各系統の前記フィードバック値は、全ての系統の巻線に流れる電流の総和に応じたフィードバック値に基づいて演算される、モータ制御装置。
続きを表示(約 970 文字)
【請求項2】
少なくとも2つの系統の前記制御部間の通信が不能となった場合には、
前記各系統の前記制御部は、当該系統の巻線に流れる電流に応じたフィードバック値のみに基づいて前記フィードバック値を演算する、請求項1に記載のモータ制御装置。
【請求項3】
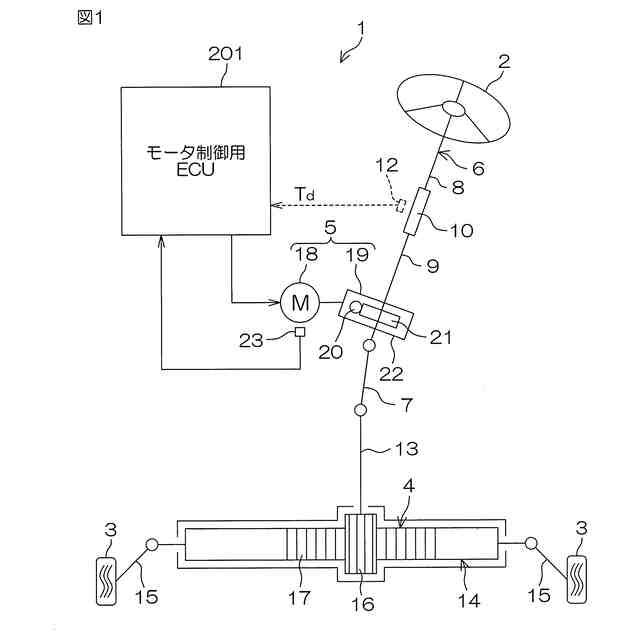
操舵系にトルクを付与する電動モータであって、第1系統巻線と第2系統巻線との2系統の巻線を備えた電動モータと、
前記第1系統巻線に電力を供給するための第1駆動回路と、
前記第2系統巻線に電力を供給するための第2駆動回路と、
前記の第1駆動回路を制御する第1制御部と、
前記の第2駆動回路を制御する第2制御部であって、前記第1制御部との間で相互通信が可能な第2制御部とを有し、
前記第1制御部は、
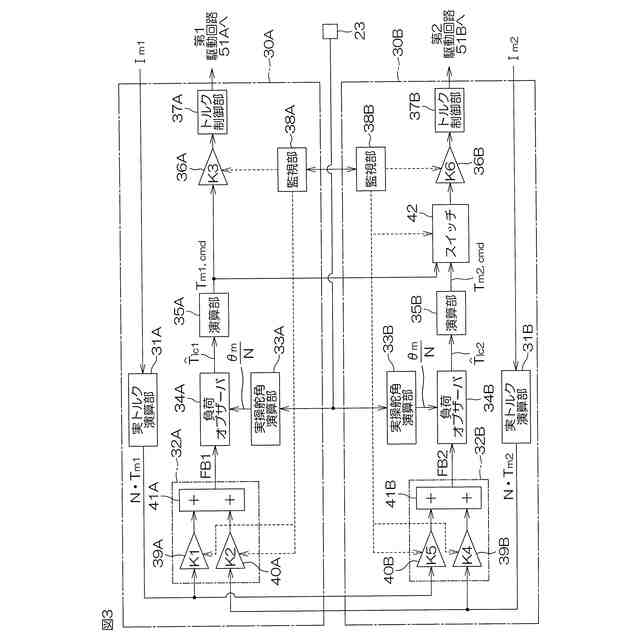
電流またはトルクに関する第1フィードバック値を用いて、前記操舵系に作用する負荷を推定する第1負荷オブザーバと、
前記第1負荷オブザーバによって推定された負荷を用いて、前記第1駆動回路および前記第2駆動回路のうち少なくとも前記第1駆動回路を駆動するための第1指令値を演算する第1演算部とを含み、
前記第2制御部は、
電流またはトルクに関する第2フィードバック値を用いて、前記操舵系に作用する負荷を推定する第2負荷オブザーバと、
前記第2負荷オブザーバによって推定された負荷を用いて、前記第2駆動回路を駆動するための第2指令値を演算する第2演算部とを含み、
通常時には、前記第1フィードバック値および前記第2フィードバック値は、いずれも、前記第1系統巻線に流れる電流に応じたフィードバック値と前記第2系統巻線に流れる電流に応じたフィードバック値との両方に基づいて演算される、モータ制御装置。
【請求項4】
前記第1制御部と前記第2制御部との間の通信が不能となった場合には、
前記第1制御部は、前記第1系統巻線に流れる電流に応じたフィードバック値のみに基づいて前記第1フィードバック値を演算し、
前記第2制御部は、前記第2系統巻線に流れる電流に応じたフィードバック値のみに基づいて前記第2フィードバック値を演算する、請求項3に記載のモータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、舵角制御用の電動モータの制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
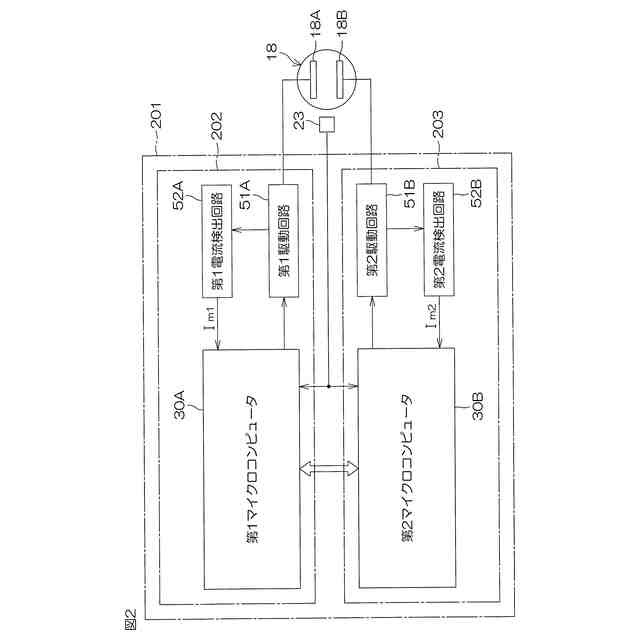
下記特許文献1には、システムに冗長性を持たせるために第1系統電動駆動機器と、第2系統電動駆動機器とを備えた電動駆動装置が開示されている。第1系統電動駆動機器は、第1制御装置、第1駆動回路、第1巻線、第1電流検出器および第1位置検出器を備えている。第2系統電動駆動機器は、第2制御装置、第2駆動回路、第2巻線、第2電流検出器および第2位置検出器を備えている。
【0003】
各制御装置は、上位コントローラからの上位信号および操舵トルク信号、車両状態等からトルク指令値を演算する機能を有している。また、各制御装置は、トルク指令値、電流検出器の電流フィードバック値および位置検出器の位置フィードバック値等に基づいて、トルク指令値と同じトルクを電動駆動装置が発生するように、対応する巻線に通電する電流指令値を演算する機能を有する。
【先行技術文献】
【特許文献】
【0004】
国際公開2017/122562号公報
国際公開2023/286169号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
巻線、駆動回路および制御部(マイクロコンピュータ)が複数系統化された電動パワーステアリングシステム(以下において、「冗長化EPS」という場合がある。)が開発されている。
【0006】
冗長化EPSにおいて、操舵系に作用する負荷を推定する負荷オブサーバをそれぞれの系統に設けた場合、各系統のフィードバック値を対応する系統内の負荷オブサーバに入力しても、各負荷オブサーバは操舵系に作用する負荷を正確に推定することはできないおそれがある。
【0007】
本開示の目的は、操舵系にトルクを付与する電動モータを含み、巻線、駆動回路および制御部が複数系統化されたシステムにおいて、操舵系に作用する負荷を負荷オブザーバが正確に推定できるようになるモータ制御装置を提供することである。
【0008】
本開示の目的は、操舵系にトルクを付与する電動モータを含み、巻線、駆動回路および制御部が2系統化されたシステムにおいて、操舵系に作用する負荷を負荷オブザーバが正確に推定できるようになるモータ制御装置を提供することである。
【課題を解決するための手段】
【0009】
本開示の一実施形態は、操舵系にトルクを付与する電動モータの巻線、駆動回路および制御部が複数系統化されたシステムに適用されるモータ制御装置であって、各系統の前記制御部は、互いに通信が可能であり、各系統内の前記制御部は、電流またはトルクに関するフィードバック値を用いて、前記操舵系に作用する負荷を推定する負荷オブザーバと、当該系統内の前記負荷オブザーバによって推定された負荷を用いて、全系統内の前記駆動回路のうち少なくとも当該系統内の前記駆動回路を駆動するための指令値を演算する演算部とを含み、通常時には、前記各系統の前記フィードバック値は、全ての系統の巻線に流れる電流の総和に応じたフィードバック値に基づいて演算される、モータ制御装置を提供する。
【0010】
この構成では、操舵系にトルクを付与する電動モータを含み、巻線、駆動回路および制御部が複数系統化されたシステムにおいて、操舵系に作用する負荷を負荷オブザーバが正確に推定できるようになる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
充電制御システム
22日前
ニデック株式会社
モータ
1か月前
個人
発電装置
1か月前
個人
電流制御形AC-DC電源
29日前
株式会社ナユタ
電源装置
22日前
個人
移動体を用いる駐車場発電所
今日
キヤノン株式会社
電源装置
1か月前
スズキ株式会社
移動システム
22日前
竹内工業株式会社
配線ダクト
7日前
トヨタ自動車株式会社
駆動装置
1か月前
カヤバ株式会社
モータ制御装置
25日前
カヤバ株式会社
モータ制御装置
25日前
個人
回転力発生装置
28日前
富士電機株式会社
整流装置
15日前
ダイハツ工業株式会社
グロメット
21日前
株式会社ダイヘン
移動装置
今日
株式会社ダイヘン
給電装置
23日前
日産自動車株式会社
回転電機
1か月前
ダイハツ工業株式会社
充電システム
1か月前
住友電装株式会社
電気接続箱
10日前
トヨタ自動車株式会社
電池システム
1か月前
ミツミ電機株式会社
電源回路
1か月前
ローム株式会社
半導体集積回路
9日前
株式会社デンソー
携帯機
21日前
富士電機株式会社
電力変換装置
4日前
富士電機株式会社
電力変換装置
25日前
株式会社豊田自動織機
電動圧縮機
1か月前
住友電装株式会社
ワイヤハーネス
9日前
個人
延線補助具
28日前
ローム株式会社
スナバ回路
3日前
トヨタ自動車株式会社
電力管理システム
1か月前
株式会社豊田自動織機
電動圧縮機
9日前
株式会社アイシン
駆動装置
21日前
株式会社マキタ
充電器
4日前
住友電装株式会社
ワイヤハーネス
17日前
本田技研工業株式会社
電流検出装置
9日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ