TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025123366
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2025099190,2022141963
出願日
2025-06-13,2022-09-07
発明の名称
制御装置、レーザレーダ装置、制御方法、プログラム、車載システム、及び移動装置
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G01S
17/931 20200101AFI20250815BHJP(測定;試験)
要約
【課題】小型で、広い範囲で物体検出や距離測定を行うことが可能なレーザレーダ装置を実現するための制御装置を提供すること。
【解決手段】制御装置は、光源からのレーザ光を偏向して物体を走査すると共に、物体からの反射光を偏向する走査部と、反射光を検出する検出部とを備えるレーザレーダ装置を制御すると共に、検出部からの出力に基づいて物体に関する情報を取得するための制御装置であって、光源に第1信号を供給させることで光源に第1出力値の第1レーザ光を射出させ、光源に第2信号を供給させることで光源に第1出力値より小さい第2出力値の第2レーザ光を射出させる出力制御部と、第1レーザ光が射出される場合、走査部の第1走査範囲における物体に関する情報を取得し、第2レーザ光が射出される場合、第1走査範囲より走査部に近い第2走査範囲における物体に関する情報を取得する取得部とを有する。
【選択図】図1
特許請求の範囲
【請求項1】
レーザレーダ装置を有する移動体であって、
前記レーザレーダ装置は、
光源からのレーザ光を偏向して物体を走査すると共に、該物体からの反射光を偏向する走査部と、
前記反射光を検出する検出部と、
前記検出部からの出力に基づいて前記物体に関する情報を取得するための制御装置とを有し、
前記走査部は、走査角度が最大値になるまで徐々に増加させた後、前記走査角度が徐々に最小値になるまで減少させるように走査し、
前記制御装置は、
前記光源に第1信号値の信号を供給させることで前記光源に第1出力値の第1レーザ光を射出させ、前記光源に前記第1信号値より小さい第2信号値の信号を供給させることで前記光源に前記第1出力値より小さい第2出力値の第2レーザ光を射出させる出力制御部と、
前記第1レーザ光が射出される場合、前記走査部の走査範囲のうち前記走査角度が所定値から前記最大値までの範囲である第1走査範囲における前記物体に関する情報を取得し、前記第2レーザ光が射出される場合、前記走査範囲のうち前記第1走査範囲より前記移動体に近く、前記走査角度が前記最小値から前記所定値までの範囲であるい第2走査範囲における前記物体に関する情報を取得する取得部とを有し、
前記取得部は、前記第1走査範囲における前記物体に関する情報を取得する処理と、前記第2走査範囲における前記物体に関する情報を取得する処理と、を交互に行い、
前記出力制御部は、 前記走査角度が前記最小値から前記所定値に変化する間、前記光源に前記第2信号を供給させ、前記走査角度が前記所定値から前記最大値に変化する間、前記光源に前記第1信号を供給させ、前記走査角度が前記最大値から前記所定値に変化する間、前記光源に前記第1信号を供給させ、前記走査角度が前記所定値から前記最小値に変化する間、前記光源に前記第2信号を供給させることを特徴とする移動体。
続きを表示(約 1,200 文字)
【請求項2】
前記第1走査範囲における前記物体に関する情報と前記第2走査範囲における前記物体に関する情報とを合成した情報を表示部に表示させる表示制御部を更に有することを特徴とする請求項1に記載の移動体。
【請求項3】
前記レーザレーダ装置は、前記光源をパルス発光させるためのパルス駆動部を更に有することを特徴とする請求項1に記載の移動体。
【請求項4】
前記レーザレーダ装置によって得られた前記物体に関する情報に基づいて自車両と前記物体との衝突可能性を判定することを特徴とする請求項1に記載の移動体。
【請求項5】
自車両と前記物体との衝突可能性が有ると判定された場合に、自車両に制動力を発生させる制御信号を出力する制御部を備えることを特徴とする請求項1に記載の移動体。
【請求項6】
自車両と前記物体との衝突可能性が有ると判定された場合に、自車両の運転者に対して警告を行う警告部を備えることを特徴とする請求項1に記載の移動体。
【請求項7】
光源からのレーザ光を偏向して物体を走査すると共に、該物体からの反射光を偏向する走査部と、
前記反射光を検出する検出部と、
前記検出部からの出力に基づいて前記物体に関する情報を取得するための制御装置とを有し、
前記走査部は、走査角度が最大値になるまで徐々に増加させた後、前記走査角度が徐々に最小値になるまで減少させるように走査し、
前記制御装置は、
前記光源に第1信号値の信号を供給させることで前記光源に第1出力値の第1レーザ光を射出させ、前記光源に前記第1信号値より小さい第2信号値の信号を供給させることで前記光源に前記第1出力値より小さい第2出力値の第2レーザ光を射出させる出力制御部と、
前記第1レーザ光が射出される場合、前記走査部の走査範囲のうち前記走査角度が所定値から前記最大値までの範囲である第1走査範囲における前記物体に関する情報を取得し、前記第2レーザ光が射出される場合、前記走査範囲のうち前記第1走査範囲よりレーザレーダ装置に近く、前記走査角度が前記最小値から前記所定値までの範囲である第2走査範囲における前記物体に関する情報を取得する取得部とを有し、
前記取得部は、前記第1走査範囲における前記物体に関する情報を取得する処理と、前記第2走査範囲における前記物体に関する情報を取得する処理と、を交互に行い、
前記出力制御部は、 前記走査角度が前記最小値から前記所定値に変化する間、前記光源に前記第2信号を供給させ、前記走査角度が前記所定値から前記最大値に変化する間、前記光源に前記第1信号を供給させ、前記走査角度が前記最大値から前記所定値に変化する間、前記光源に前記第1信号を供給させ、前記走査角度が前記所定値から前記最小値に変化する間、前記光源に前記第2信号を供給させることを特徴とするレーザレーダ装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、レーザレーダ装置、制御方法、プログラム、車載システム、及び移動装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、レーザ光を物体に照射し、物体からの反射光を検出することで物体検出や距離測定を行うレーザレーダ装置が知られている。
【0003】
特許文献1には、レーザ光を強度の異なる複数のレーザ光に分岐させると共に、複数のレーザ光の強度を制御する構成が開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第3156690号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の構成では、1つのレーザ光を強度が異なる複数のレーザ光に分岐させるための光学部材が必要である。また、複数のレーザ光を走査するための複数の走査機構や、複数のレーザ光を選択的に射出させるための制御機構が必要となる。
【0006】
本発明は、小型で、遠距離から近距離まで広い範囲で物体検出や距離測定を行うことが可能なレーザレーダ装置を実現するための制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の移動体は、レーザレーダ装置を有する移動体であって、レーザレーダ装置は、光源からのレーザ光を偏向して物体を走査すると共に、物体からの反射光を偏向する走査部と、反射光を検出する検出部と、検出部からの出力に基づいて物体に関する情報を取得するための制御装置とを有し、走査部は、走査角度が最大値になるまで徐々に増加させた後、走査角度が徐々に最小値になるまで減少させるように走査し、制御装置は、光源に第1信号値の信号を供給させることで光源に第1出力値の第1レーザ光を射出させ、光源に第1信号値より小さい第2信号値の信号を供給させることで光源に第1出力値より小さい第2出力値の第2レーザ光を射出させる出力制御部と、第1レーザ光が射出される場合、走査部の走査範囲のうち走査角度が所定値から最大値までの範囲である第1走査範囲における物体に関する情報を取得し、第2レーザ光が射出される場合、走査範囲のうち第1走査範囲より移動体に近く、走査角度が最小値から所定値までの範囲である第2走査範囲における物体に関する情報を取得する取得部とを有し、取得部は、第1走査範囲における物体に関する情報を取得する処理と、第2走査範囲における物体に関する情報を取得する処理と、を交互に行い、出力制御部は、走査角度が最小値から所定値に変化する間、光源に第2信号を供給させ、走査角度が所定値から最大値に変化する間、光源に第1信号を供給させ、走査角度が最大値から所定値に変化する間、光源に第1信号を供給させ、走査角度が所定値から最小値に変化する間、光源に第2信号を供給させることを特徴とする。
【発明の効果】
【0008】
本発明によれば、小型で、遠距離から近距離まで広い範囲で物体検出や距離測定を行うことが可能なレーザレーダ装置を実現するための制御装置を提供することができる。
【図面の簡単な説明】
【0009】
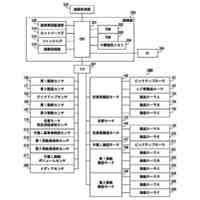
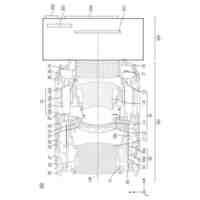
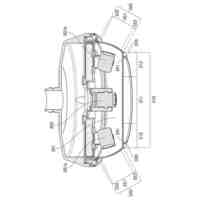
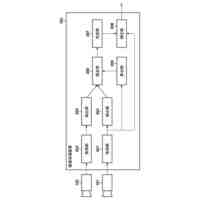
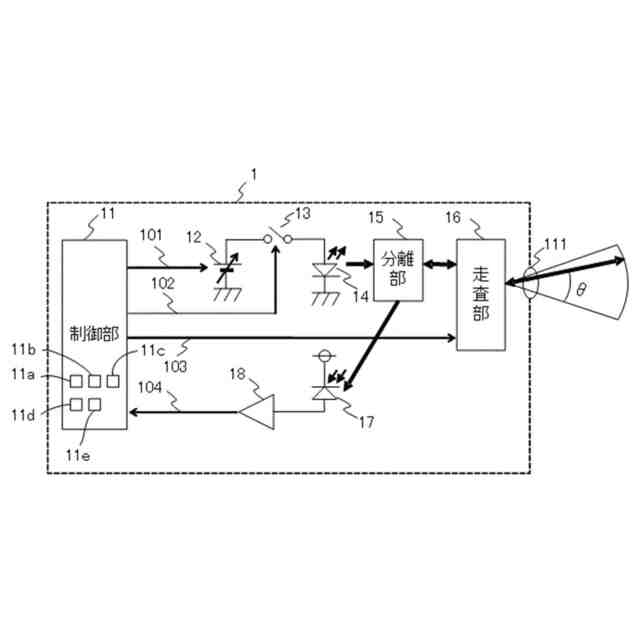
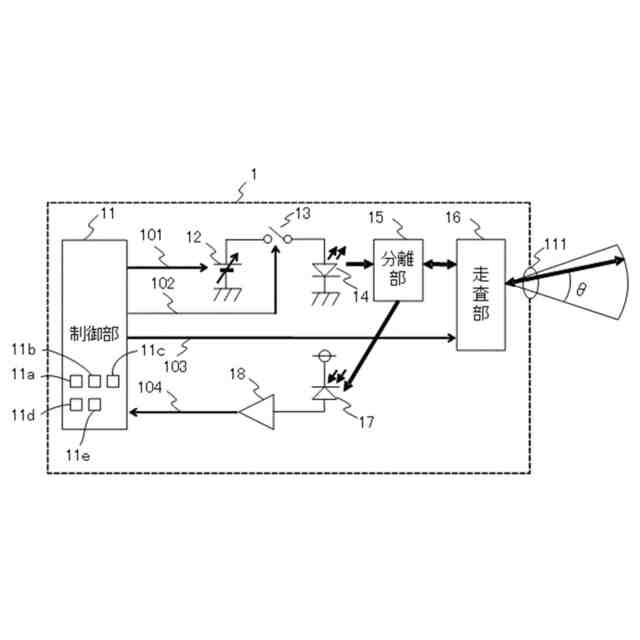
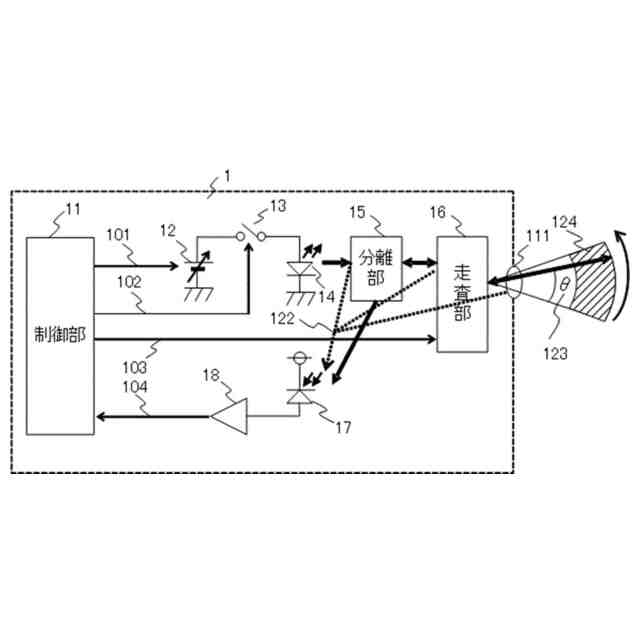
第1の実施形態のレーザレーダ装置の構成図である。
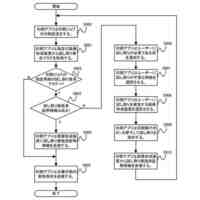
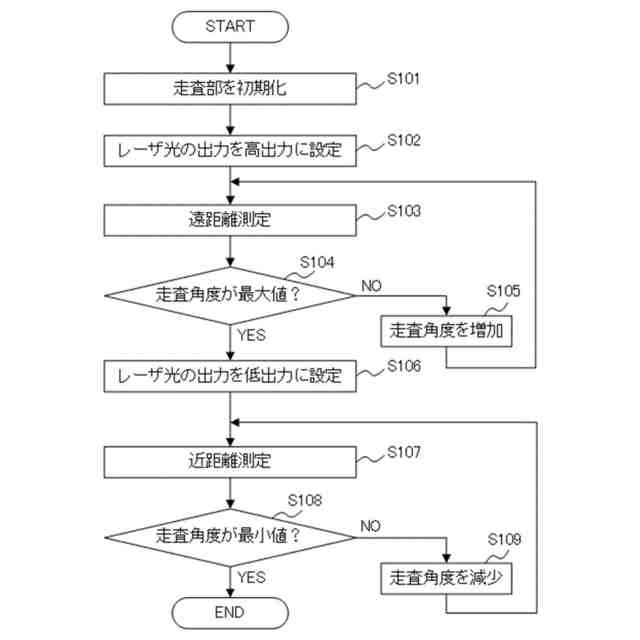
第1の実施形態の制御部による制御動作を示すフローチャートである。
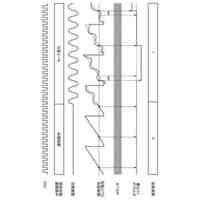
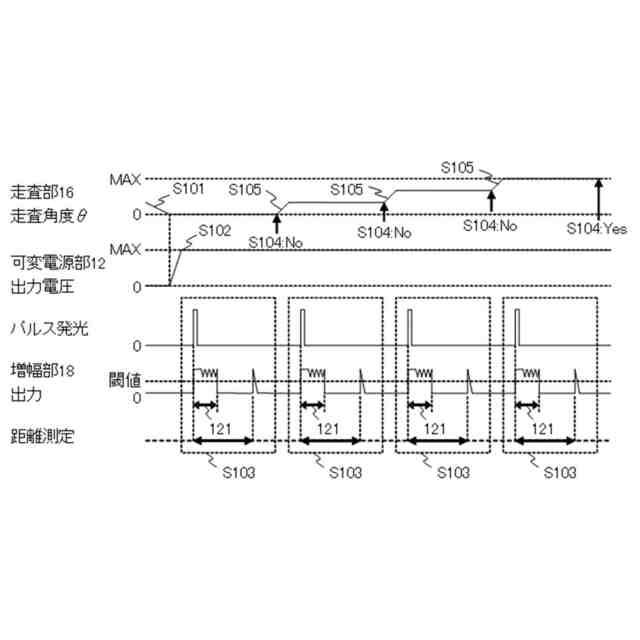
図2のステップS101からステップS105の各処理における各部の波形を示す図である。
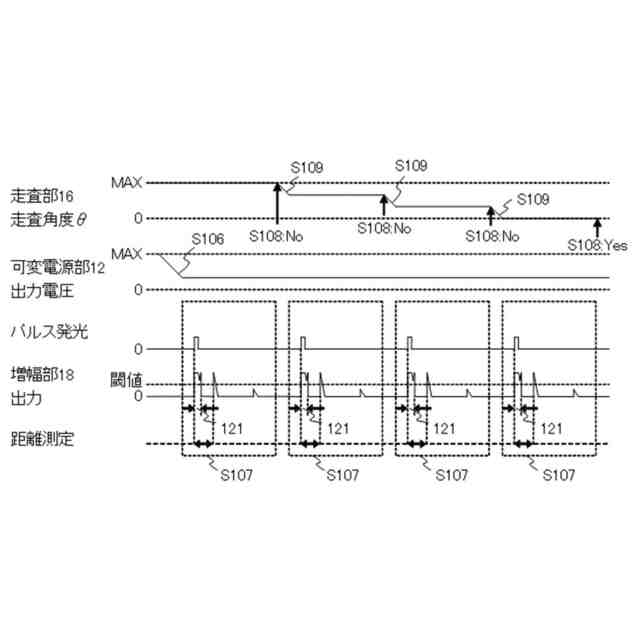
図2のステップS106からステップS109の各処理における各部の波形を示す図である。
図2のステップS103における、迷光が検出部に入射する様子と走査範囲を示す図である。
図2のステップS107における、迷光が検出部に入射する様子と走査範囲を示す図である。
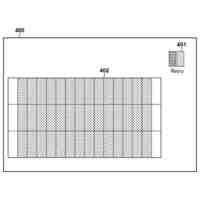
表示部に表示される第1の実施形態の走査範囲を示す図である。
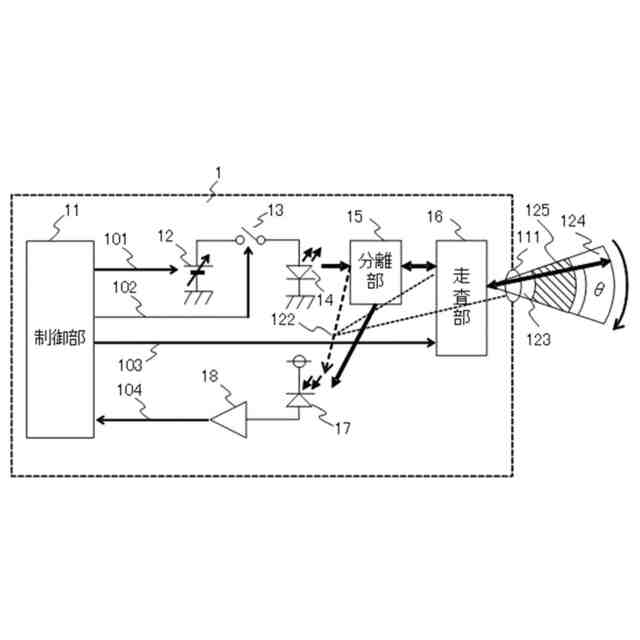
第2の実施形態のレーザレーダ装置の構成図である。
第2の実施形態のレーザレーダ装置の走査範囲を示す図である。
第2の実施形態の制御部による制御動作を示すフローチャートである。
第3の実施形態のレーザレーダ装置の構成図である。
第3の実施形態の制御部による制御動作を示すフローチャートである。
図12の各ステップの処理における各部の波形を示す図である。
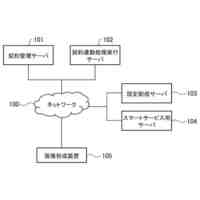
車載システムの構成図である。
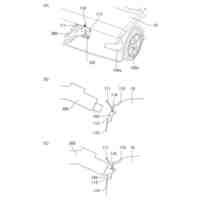
車両(移動装置)の模式図である。
車載システムの動作例を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施例について、図面を参照しながら詳細に説明する。各図において、同一の部材については同一の参照番号を付し、重複する説明は省略する。
<第1の実施形態>
図1は、本実施形態のレーザレーダ装置1の構成図である。レーザレーダ装置1は、制御部(制御装置)11、可変電源部12、パルス駆動部13、レーザ発光部(光源)14、分離部15、走査部16、検出部17、増幅部18、及び光学部材111を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
キヤノン株式会社
移動体
8日前
キヤノン株式会社
発光装置
7日前
キヤノン株式会社
発光装置
2日前
キヤノン株式会社
光学機器
2日前
キヤノン株式会社
撮像装置
今日
キヤノン株式会社
電子機器
今日
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像表示装置
8日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成システム
1日前
キヤノン株式会社
プログラム、方法
今日
キヤノン株式会社
制御装置、制御方法
今日
キヤノン株式会社
演算装置、演算方法
2日前
キヤノン株式会社
光学装置及び撮像装置
8日前
キヤノン株式会社
光学系および撮像装置
2日前
キヤノン株式会社
保護カバー及び撮像装置
3日前
キヤノン株式会社
光電変換装置および機器
8日前
キヤノン株式会社
レンズ装置および撮像装置
3日前
キヤノン株式会社
情報処理システム及び方法
4日前
キヤノン株式会社
発光装置及びその製造方法
3日前
キヤノン株式会社
光加工方法及び光加工装置
8日前
キヤノン株式会社
露光装置及び画像形成装置
8日前
キヤノン株式会社
液体吐出装置及び吐出方法
3日前
キヤノン株式会社
通信装置およびその制御方法
1日前
キヤノン株式会社
情報処理装置、情報処理方法
8日前
キヤノン株式会社
定着装置および画像形成装置
8日前
キヤノン株式会社
画像処理装置、画像処理方法
4日前
キヤノン株式会社
電子モジュール及び電子機器
7日前
キヤノン株式会社
走査光学装置及び画像形成装置
3日前
キヤノン株式会社
レンズユニット、及び撮像装置
7日前
キヤノン株式会社
レンズ装置および撮像システム
2日前
キヤノン株式会社
通信システム及び画像形成装置
1日前
キヤノン株式会社
インク及び感熱転写記録用シート
9日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ