TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025115302
公報種別
公開特許公報(A)
公開日
2025-08-06
出願番号
2024009783
出願日
2024-01-25
発明の名称
測量システム
出願人
公益財団法人河川財団
,
株式会社Prodrone
代理人
弁理士法人上野特許事務所
主分類
G01C
15/00 20060101AFI20250730BHJP(測定;試験)
要約
【課題】河川や海、ダム・湖沼等の測量に無人航空機を応用することで、これをより簡便に、より高精度に実施可能とする。
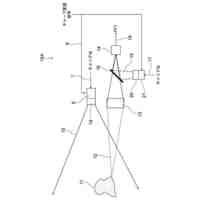
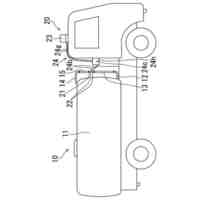
【解決手段】水面に降着可能な無人航空機と、前記無人航空機の着水後に水中の地形データを取得するスキャナー装置と、着水後の前記無人航空機の高度を取得するGNSS装置と、前記GNSS装置が出力する高度値を補正するための補正情報を取得するRTK装置とを備える測量システム、及び、本発明の無人航空機を、河川の上流から下流に向けて、該河川の水流に乗せて流す工程を含む河川測量方法によりこれを解決する。
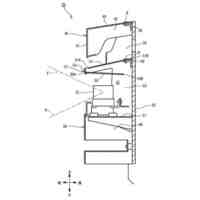
【選択図】図7
特許請求の範囲
【請求項1】
水面に降着可能な無人航空機と、
前記無人航空機の着水後に水中の地形データを取得するスキャナー装置と、
着水後の前記無人航空機の高度を取得するGNSS(Global Navigation Satellite System)装置と、
前記GNSS装置が出力する高度値を補正するための補正情報を取得するRTK(Real Time Kinematic)装置と、を備える、
測量システム。
続きを表示(約 960 文字)
【請求項2】
前記RTK装置は、インターネットを介して前記補正情報を取得する、
請求項1に記載の測量システム。
【請求項3】
前記RTK装置は、移動体通信網を介して前記補正情報を取得する、
請求項1に記載の測量システム。
【請求項4】
前記スキャナー装置はマルチビーム音響測深装置である、
請求項1に記載の測量システム。
【請求項5】
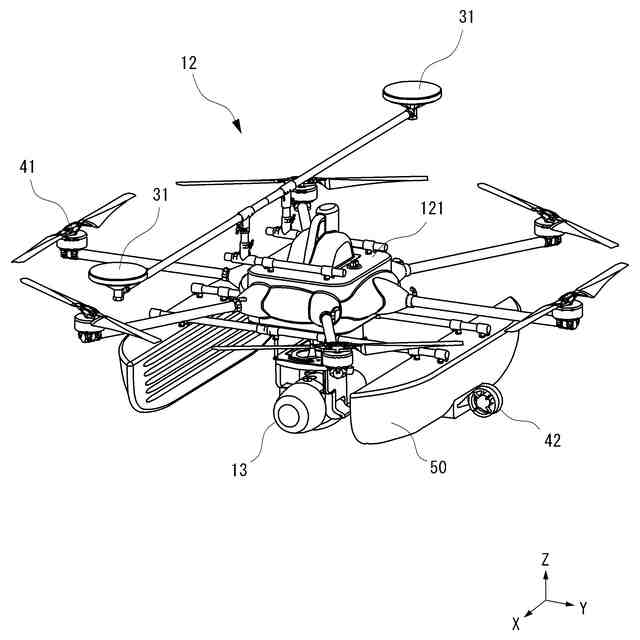
前記無人航空機は、
制御装置と、
空中を移動するための推力源であるロータと、を備え、
前記制御装置は、前記ロータの停止後に/にも、前記GNSS装置から高度を取得する、
請求項1に記載の測量システム。
【請求項6】
前記RTK装置は、前記ロータの停止後に/にも、前記補正情報を取得する、
請求項5に記載の測量システム。
【請求項7】
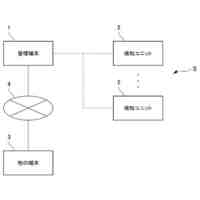
データ統合部を備え、
前記データ統合部は、前記無人航空機の着水後に、
(1)前記スキャナー装置が取得した前記地形データ又はその加工値、及び前記地形データを取得した経緯度または時刻と、
(2)前記高度値、該高度値を前記補正情報で補正した値である補正高度値、又は該補正高度値からジオイド高を除いた値である水面標高、及び前記高度値を取得した経緯度または時刻と、を収集する、
請求項1に記載の測量システム。
【請求項8】
前記データ統合部は、
前記(1)に基づき、河川の流量を算出する、
請求項7に記載の測量システム。
【請求項9】
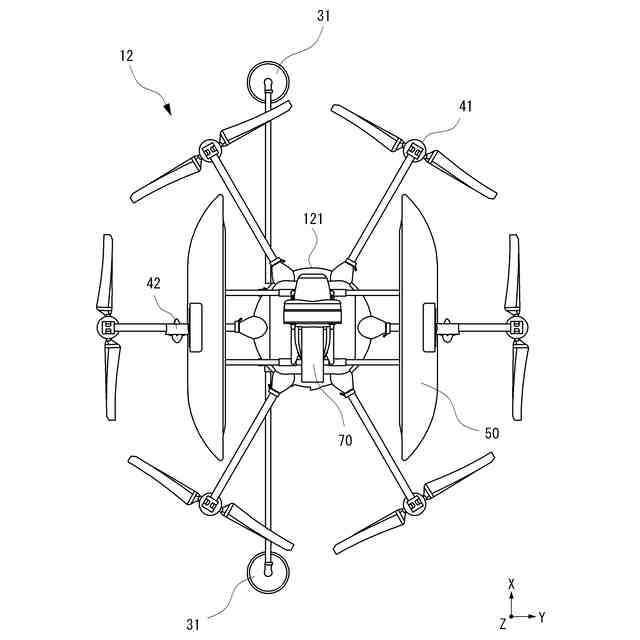
前記無人航空機は、
空中を移動するための推力源であるロータと、
水面上を移動するための推力源である水上推進装置と、を備える、
請求項1に記載の測量システム。
【請求項10】
前記無人航空機は制御装置を備え、
前記制御装置は、
前記ロータで空中を移動する飛行モードと、
前記水上推進装置により水面上を移動する航行モードと、を切り替え可能である、
請求項9に記載の測量システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は無人航空機を用いた測量技術に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
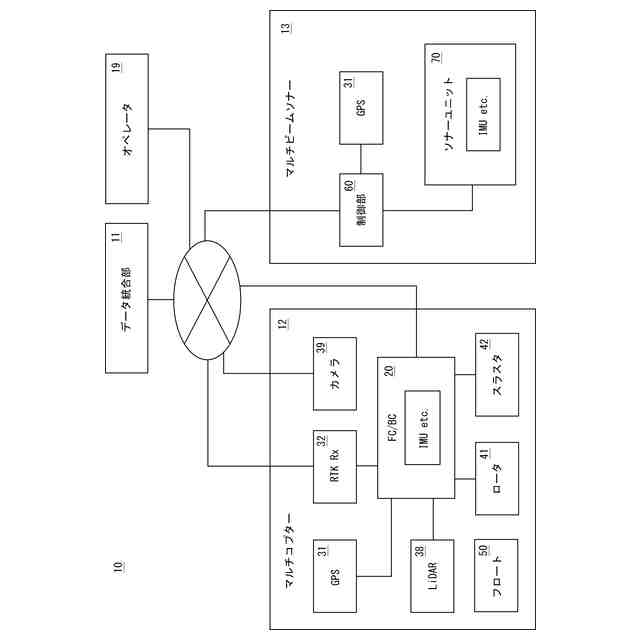
下記特許文献1には、機体を水面に浮かべるためのフロート、水面上の移動手段であるスクリュー、及びマルチビームソナーを備えた無人航空機が開示されている。下記特許文献2にはRTK(Real Time Kinematic)システムを利用した無人航空機が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-041863
国際公開第2018/168564(A1)号パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0004】
地球温暖化による水害の激甚化や、防災に関する法制度の強化に伴い、これに劣後しない新たな治水システム・河川管理手法が求められている。一方、管理の対象である河川は、それぞれが地理的・空間的な個性を有するとともに、洪水により刻々と状態が変化するという予測困難性を有している。河川が将来にわたってその備えるべき安全性を維持し続けるためには、河道変化や、構造物等が破壊されるメカニズム等を解明し、降雨や洪水の水理的影響を定量的に予測できるようにする必要がある。そしてそのためには、地形・地質を含む河川やその流域の状態を正確かつ詳細に測定可能とし、事実・知見を積み重ねていくことが不可欠である。とりわけ、通常時や洪水時の河川の流量、水位(水面の標高)、及びその変化を把握することは河川を管理する上で重要であるが、現状、流量を算出するための河道の形状と流速(流れの速さ)、及び水位を同時に測定可能な仕組みは存在しない。
【0005】
現行の手法では、河道形状が変化しないことを前提に基準観測所の水位から算出した洪水流量を用いているが、河道形状が変化している場合に河川の水位予測が大きく異なり洪水対策・水防活動・避難判断に支障が生じる場合がある。また、ダムにおいては、洪水で流木等が流入しボートでの計測が困難な場合は、河床に堆積した流土砂を計ることが困難であり、有効貯水量の把握に時間を要していた。
【0006】
このような問題に鑑み、本発明が解決しようとする課題は、河川や海、ダム・湖沼等の測量に無人航空機を応用することで、これをより簡便に、より高精度に実施可能とすることにある。
【課題を解決するための手段】
【0007】
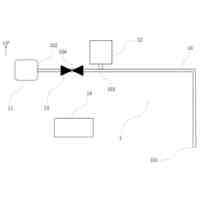
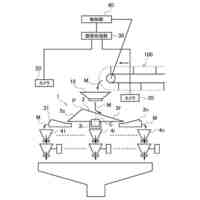
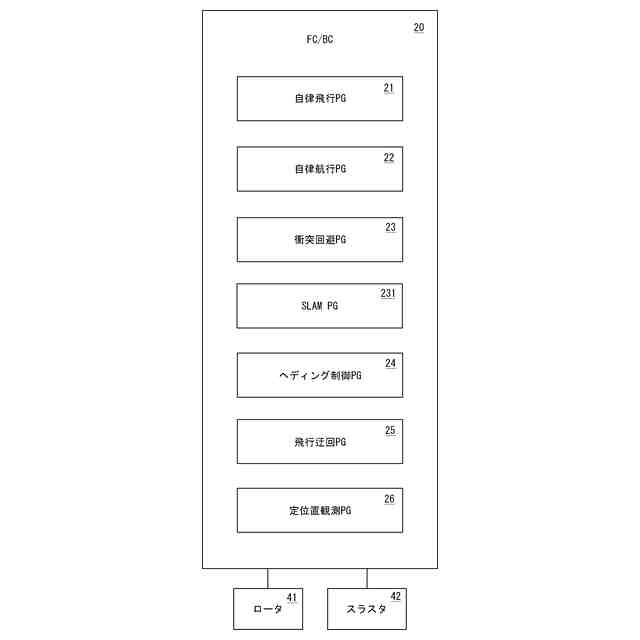
上記課題を解決するため、本発明の測量システムは、水面に降着可能な無人航空機と、前記無人航空機の着水後に水中の地形データを取得するスキャナー装置と、着水後の前記無人航空機の高度を取得するGNSS(Global Navigation Satellite System)装置と、前記GNSS装置が出力する高度値を補正するための補正情報を取得するRTK装置と、を備えることを要旨とする。
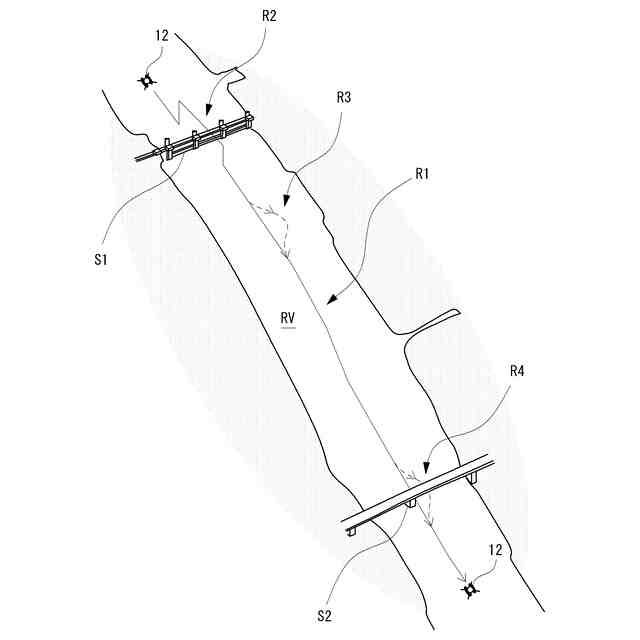
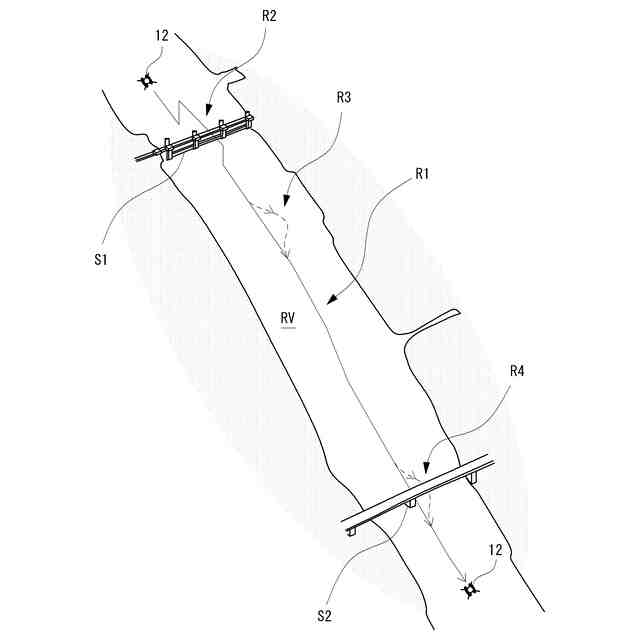
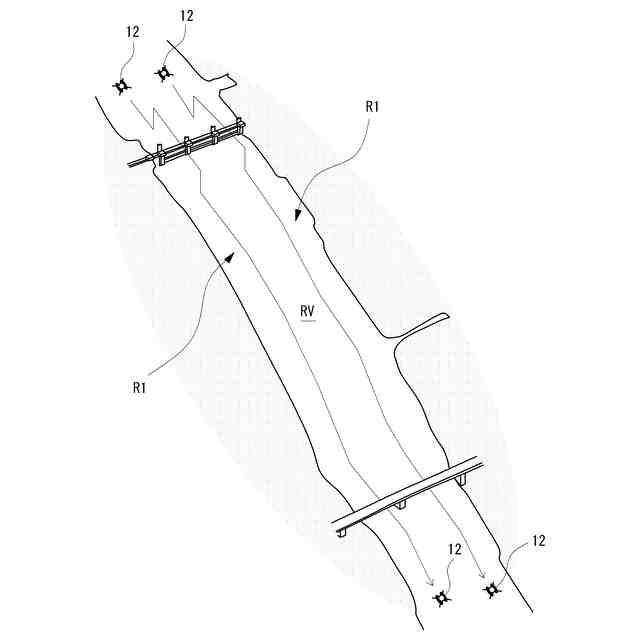
【0008】
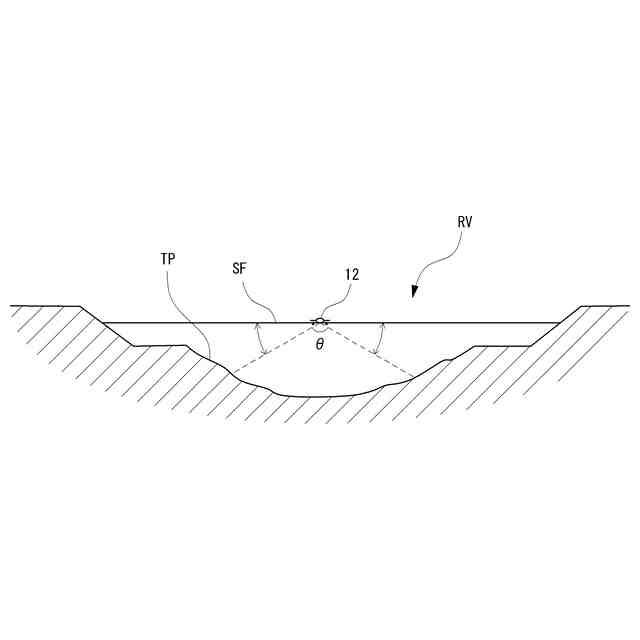
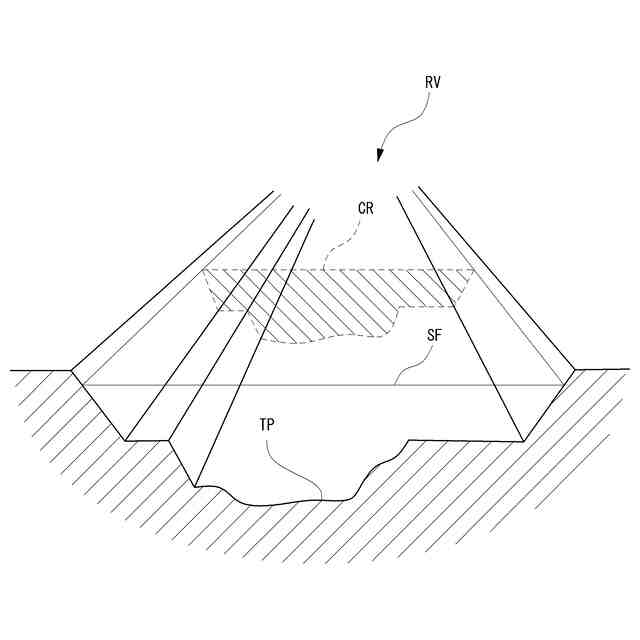
無人航空機を水面に浮かべ、そのGNSS装置が出力する高度値をRTK補正することにより、比較的正確な水位を得ることができる。また、無人航空機を河川に浮かべ、これをその水流に乗せて流すことにより、その河川の流速を得ることができる。河道の地形データ(河川の断面積)と流速が得られれば、その河川の流量を算出することができ、本発明によればさらにその水位までを得ることができる。
【0009】
また、前記RTK装置は、インターネットを介して前記補正情報を取得することが好ましい。同様に、前記RTK装置は、移動体通信網を介して前記補正情報を取得することが好ましい。これにより、測量地点の周囲にRTK基地局(固定局)を都度設置する手間や、RTK基地局との距離の制約から解放され、より迅速・簡便に、かつ広範な測量が可能となる。
【0010】
また、前記スキャナー装置はマルチビーム音響測深装置であることが好ましい。超音波を用いた測距は、光学カメラやグリーンレーザーに比べて濁度による影響を受けにくく、困難な条件下でもより高い精度の地形データが得られるからである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
公益財団法人河川財団
測量システム
3日前
ユニパルス株式会社
力変換器
1日前
横浜ゴム株式会社
音響窓
3日前
株式会社豊田自動織機
産業車両
8日前
日置電機株式会社
測定装置
2日前
個人
センサーを備えた装置
5日前
株式会社国際電気
試験装置
15日前
IPU株式会社
距離検出装置
1日前
日本精機株式会社
施工管理システム
5日前
株式会社東芝
センサ
4日前
株式会社CAST
センサ固定治具
8日前
株式会社田中設備
報知装置
9日前
株式会社熊平製作所
刃物類判別装置
8日前
WOTA株式会社
液位検出システム
15日前
オムロン株式会社
スイッチング装置
15日前
日本装置開発株式会社
X線検査装置
18日前
アズビル株式会社
火炎状態判定装置
2日前
個人
ヨウ素滴定を用いたアミノ酸の定量方法
12日前
TDK株式会社
磁気検出システム
15日前
已久工業股ふん有限公司
空気圧縮機構造
4日前
トヨタ自動車株式会社
表面傷の検査方法
3日前
ミネベアミツミ株式会社
角度センサ
12日前
株式会社 ミックウェア
端末装置及びプログラム
10日前
ミネベアミツミ株式会社
角度センサ
12日前
コニカミノルタ株式会社
光学特性測定装置
8日前
愛知時計電機株式会社
超音波流量計
1日前
新明和工業株式会社
ダンプカー
8日前
株式会社東芝
センサ及び電子装置
8日前
ミネベアミツミ株式会社
ひずみゲージ
2日前
矢崎総業株式会社
導通検査装置
11日前
ミネベアミツミ株式会社
ひずみゲージ
8日前
オプテックス株式会社
検知装置
11日前
DICプラスチック株式会社
検体採取具
2日前
東ソー株式会社
検査カートリッジの判定方法及び装置
8日前
株式会社京都プラテック
光電式液面センサ
10日前
株式会社イシダ
組合せ計量装置
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ