TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025109594
公報種別
公開特許公報(A)
公開日
2025-07-25
出願番号
2024003579
出願日
2024-01-12
発明の名称
同期モータの制御装置
出願人
株式会社ニッキ
代理人
弁理士法人平和国際特許事務所
主分類
H02P
21/05 20060101AFI20250717BHJP(電力の発電,変換,配電)
要約
【課題】なるべく省構成かつ高トルクで同期モータを制御する装置を提供する。
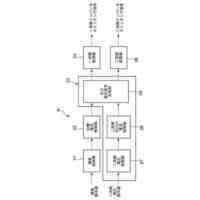
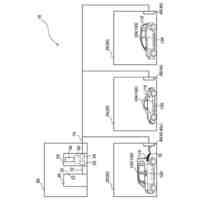
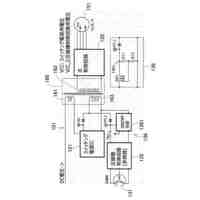
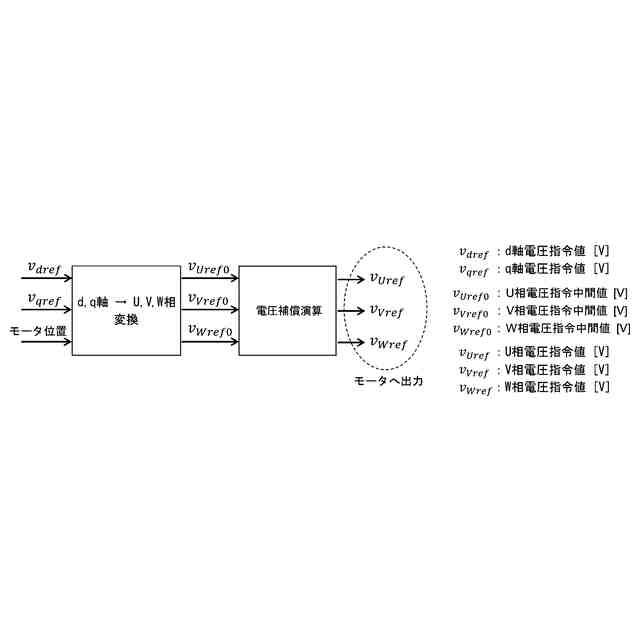
【解決手段】同期モータの制御装置は、永久磁石を用いた回転子を有する同期モータと、d軸電圧指令値,q軸電圧指令値及びモータ位置に応じて、d軸電流及びq軸電流を三相電圧指令中間値に変換する電圧指令値変換手段と、前記三相電圧指令中間値に基づいて電圧補償演算を行い、三相電圧指令値を算出する電圧補償演算手段と、前記三相電圧指令値に基づいて前記同期モータに電圧を出力するインバータと、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
永久磁石を用いた回転子を有する同期モータと、
d軸電圧指令値,q軸電圧指令値及びモータ位置に応じて、d軸電流及びq軸電流を三相電圧指令中間値に変換する電圧指令値変換手段と、
前記三相電圧指令中間値に基づいて電圧補償演算を行い、三相電圧指令値を算出する電圧補償演算手段と、
前記三相電圧指令値に基づいて前記同期モータに電圧を出力するインバータと、を備える、
ことを特徴とする同期モータの制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記d軸電圧指令値および前記q軸電圧指令値の最大値は、電気角60度間隔で前記三相電圧指令値の最大電圧と等しく、前記電気角60度間隔以外の電気角において前記三相電圧指令値の最大電圧よりも大きい、
ことを特徴とする請求項1記載の同期モータの制御装置。
【請求項3】
前記電圧補償演算は、以下のA,B,C,Dの4条件のいずれに該当するかに応じて演算される、
条件A:U相電圧指令中間値が、V相電圧指令中間値以上、且つ、W相電圧指令中間値以上、且つ、前記三相電圧指令値の最大電圧以上、を満たす場合
条件B:前記条件Aを満たさず、V相電圧指令中間値が、U相電圧指令中間値以上、且つ、W相電圧指令中間値以上、且つ、前記三相電圧指令値の最大電圧以上、を満たす場合
条件C:前記条件Bを満たさず、W相電圧指令中間値が、U相電圧指令中間値以上、且つ、V相電圧指令中間値以上、且つ、前記三相電圧指令値の最大電圧以上、を満たす場合
条件D:前記条件A,B,Cのいずれも満たさない場合
ことを特徴とする請求項1記載の同期モータの制御装置。
【請求項4】
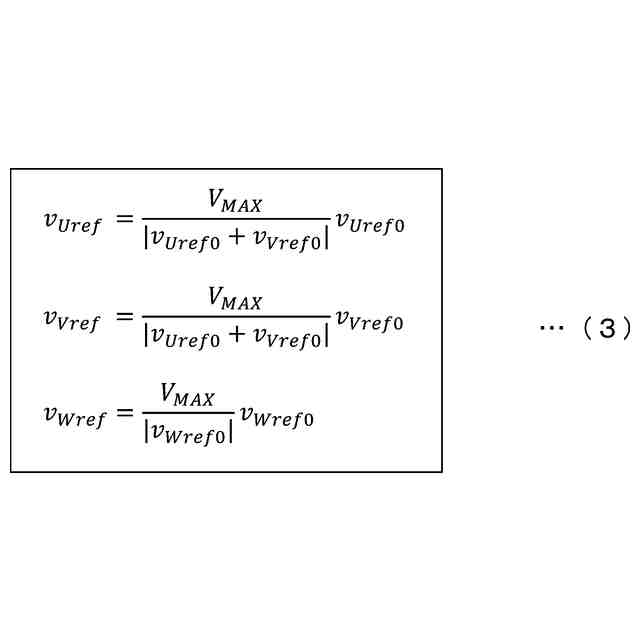
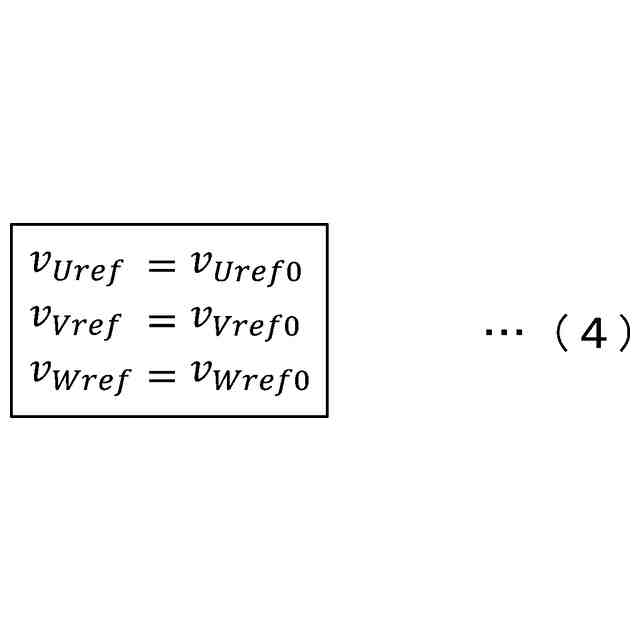
前記電圧補償演算において、前記三相電圧指令値は、
前記条件Aに該当する場合は下記数式(1)、
前記条件Bに該当する場合は下記数式(2)、
前記条件Cに該当する場合は下記数式(3)、
前記条件Dに該当する場合は下記数式(4)、
により演算され、
ここで、
・v
Uref
はU相電圧指令値、
・v
Vref
はV相電圧指令値、
・v
Wref
はW相電圧指令値、
・v
Uref0
はU相電圧指令中間値、
・v
Vref0
はV相電圧指令中間値、
・v
Wref0
はW相電圧指令中間値、
・V
MAX
は三相電圧指令値の最大電圧、である、
ことを特徴とする請求項3記載の同期モータの制御装置。
TIFF
2025109594000010.tif
61
166
TIFF
2025109594000011.tif
61
166
TIFF
2025109594000012.tif
61
166
TIFF
2025109594000013.tif
26
166
発明の詳細な説明
【技術分野】
【0001】
本発明は、ベクトル制御により動作する同期モータの制御装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
同期モータは、入力する交流電圧に同期して回転する電動機であり、入力する交流電流により形成される回転磁界で回転子が吸引されながらその磁界に追従して回転動作を行うものであるが、これに接続した制御装置による制御システムで駆動制御されるのが一般的である。
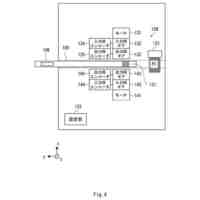
【0003】
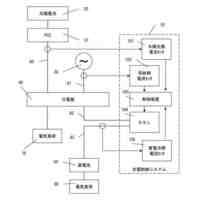
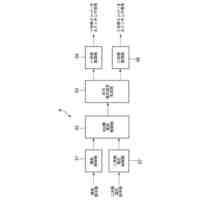
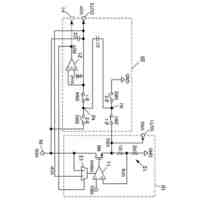
従来の同期モータの制御装置における制御システムの一例を図4に示す。このシステムでは、検出もしくは推定したモータ位置に同期して回転するベクトルであるd軸電圧指令値(v
dref
),q軸電圧指令値(v
qref
)を、三相電圧指令値(v
Uref
,v
Vref
,v
Wref
)に変換して、インバータのスイッチング素子をオン・オフ制御することにより当該三相電圧指令値をモータに出力する。
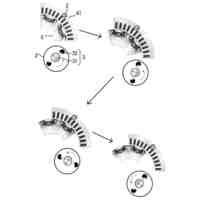
【0004】
図5を用いて、従来のベクトル制御を説明する。この図は、電気角で見たモータの三相電圧と、d軸電圧,q軸電圧のベクトル図である。三相電圧は、モータの固定子に固定された120度ずれの軸である一方、d軸とq軸はモータ位置(回転子の向き)に追従する軸である。回転子には永久磁石が付いており、この磁石の磁界と同じ向きの磁界を発生させる電流をd軸電流、直交方向の磁界を発生させる電流をq軸電流と呼ぶ。このd軸電流を流す方向の電圧をd軸電圧とし、q軸電流を流す方向の電圧をq軸電圧とする。従来のベクトル制御下においては、d軸電圧とq軸電圧の最大値は、制御装置に接続されている電源の供給電圧によって定まり、360度どの方向に関しても同じ波高値(V
MAX
)となり、出力可能な電圧範囲はベクトル上で円を描く。
【0005】
一方で、一般的な制御方法の一つであり、例えば特開平1-255494号公報(特許文献1)に示されるような120度通電方式では、電圧の波高値は従来のベクトル制御における波高値を超えた電圧(V
MAX
の2/√3倍)を出力することができ、高トルクを実現することができる。しかしながら、120度通電方式では、出力電圧のベクトルが60度ごとに遷移するため、トルクリップルが発生し、高調波電流の発生、静音性の低下等を生じる問題があった。
【0006】
これに対し、例えば特開平3-036986号公報(特許文献2)に示す発明のように、トルクリップルを減少させることを目的としたモータの駆動装置が知られている。
【0007】
しかしながら、前記特許文献2に記載された発明においては、電流検出手段および無効電流を流すための構成が必要となるため、そのためのハードウェアコストを要するものであった。
【先行技術文献】
【特許文献】
【0008】
特開平1-255494号公報
特開平3-036986号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
そこで、なるべく省構成かつ高トルクで同期モータを制御する装置を提供することを課題とする。
【課題を解決するための手段】
【0010】
上記課題を解決するためになされた本発明である同期モータの制御装置は、永久磁石を用いた回転子を有する同期モータと、d軸電圧指令値,q軸電圧指令値及びモータ位置に応じて、d軸電流及びq軸電流を三相電圧指令中間値に変換する電圧指令値変換手段と、前記三相電圧指令中間値に基づいて電圧補償演算を行い、三相電圧指令値を算出する電圧補償演算手段と、前記三相電圧指令値に基づいて前記同期モータに電圧を出力するインバータと、を備える、ことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ニッキ
同期モータの制御装置
22日前
株式会社ニッキ
気体燃料用インジェクタ
9日前
個人
充電制御システム
9日前
ニデック株式会社
モータ
23日前
個人
発電装置
17日前
株式会社ナユタ
電源装置
9日前
個人
電流制御形AC-DC電源
16日前
キヤノン株式会社
電源装置
17日前
個人
ステッピングモータ実習装置
1か月前
スズキ株式会社
移動システム
9日前
トヨタ自動車株式会社
駆動装置
19日前
カヤバ株式会社
モータ制御装置
12日前
カヤバ株式会社
モータ制御装置
12日前
サンデン株式会社
電力変換装置
24日前
サンデン株式会社
電力変換装置
24日前
個人
回転力発生装置
15日前
富士電機株式会社
整流装置
2日前
株式会社ダイヘン
給電装置
10日前
ダイハツ工業株式会社
グロメット
8日前
ダイハツ工業株式会社
充電システム
18日前
ミツミ電機株式会社
電源回路
18日前
トヨタ自動車株式会社
電池システム
22日前
日産自動車株式会社
回転電機
19日前
シャープ株式会社
冷蔵庫
24日前
富士電機株式会社
電力変換装置
12日前
株式会社デンソー
携帯機
8日前
住友電装株式会社
ワイヤハーネス
4日前
個人
延線補助具
15日前
ミネベアミツミ株式会社
回転機器
1か月前
ミネベアミツミ株式会社
回転機器
1か月前
ミネベアミツミ株式会社
回転機器
1か月前
株式会社日立製作所
回転電機
1か月前
ミネベアミツミ株式会社
回転機器
1か月前
株式会社デンソー
電源装置
25日前
株式会社豊田自動織機
電動圧縮機
22日前
トヨタ自動車株式会社
電力管理システム
22日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ