TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025109179
公報種別
公開特許公報(A)
公開日
2025-07-24
出願番号
2024203029
出願日
2024-11-21
発明の名称
経路生成方法、経路生成システム、及び経路生成プログラム
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20250716BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】非矩形状の作業領域において作業車両を自動走行させる目標経路を容易に生成することが可能な目標経路を生成する経路生成方法、経路生成プログラム、及び経路生成システムを提供する。
【解決手段】設定処理部212は、作業車両10を自動走行させる目標経路を生成する際の基準となる第1基準線と、第1基準線とは形状又は方位が異なる第2基準線とを設定する。生成処理部213は、第1基準線の形状又は方位に基づいて、作業車両10を自動走行させる目標経路を生成し、目標経路に含まれる複数の作業経路のうち一又は複数の第1作業経路の形状又は方位を、第2基準線の形状又は方位に基づいて設定する。
【選択図】図1
特許請求の範囲
【請求項1】
作業領域において作業車両を自動走行させる目標経路を生成する経路生成方法であって、
前記目標経路を生成する際の基準となる第1基準線と、前記第1基準線とは形状又は方位が異なる第2基準線とを設定することと、
前記第1基準線の形状又は方位に基づいて、前記作業車両を自動走行させる前記目標経路を生成することと、
前記目標経路に含まれる複数の作業経路のうち一又は複数の第1作業経路の形状又は方位を、前記第2基準線の形状又は方位に基づいて設定することと、
を実行する経路生成方法。
続きを表示(約 1,100 文字)
【請求項2】
前記作業領域を登録する際にユーザーの手動走行操作により取得される前記作業車両の走行軌跡に基づいて、前記第1基準線及び前記第2基準線を設定する、
請求項1に記載の経路生成方法。
【請求項3】
前記第1作業経路の形状又は方位を、前記第1基準線からの距離に基づいて設定する、
請求項1に記載の経路生成方法。
【請求項4】
複数の前記第1作業経路のそれぞれの形状又は方位を、前記第1基準線からの距離が大きくなるに従って、前記第2基準線の形状又は方位に近付ける、
請求項1に記載の経路生成方法。
【請求項5】
前記第2基準線は、前記第1基準線を設定する際に利用した情報に基づいて設定される、
請求項1に記載の経路生成方法。
【請求項6】
前記第1基準線は、少なくとも一部に湾曲部又は屈曲部を含む非直線であり、
前記第2基準線は、前記湾曲部及び前記屈曲部を含まない直線である、
請求項1に記載の経路生成方法。
【請求項7】
前記第1作業経路の設定本数がN本に設定された場合に、
1本目から(N-1)本目までの前記第1作業経路のそれぞれの形状又は方位を、前記第1基準線からの距離が大きくなるに従って、前記第2基準線の形状又は方位に近付け、
N本目の前記第1作業経路の形状又は方位を、前記第2基準線の形状又は方位に一致させる、
請求項1に記載の経路生成方法。
【請求項8】
前記設定本数に基づいて、前記第1作業経路ごとに、当該第1作業経路と前記第2基準線との偏差の減算量を設定する、
請求項7に記載の経路生成方法。
【請求項9】
互いに非平行な2本の前記第1基準線を設定し、
複数の前記第1作業経路のうち一方の前記第1基準線側に設定される前記第1作業経路の形状又は方位を、前記一方の前記第1基準線からの距離が大きくなるに従って、前記第2基準線の形状又は方位に近付け、
複数の前記第1作業経路のうち他方の前記第1基準線側に設定される前記第1作業経路の形状又は方位を、前記他方の前記第1基準線からの距離が大きくなるに従って、前記第2基準線の形状又は方位に近付ける、
請求項1に記載の経路生成方法。
【請求項10】
隣り合う2本の前記第1作業経路のそれぞれの作業幅が重複しないように、2本の前記第1作業経路の位置を設定する、
請求項1~9のいずれかに記載の経路生成方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両を自動走行させる目標経路を生成する技術に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、圃場において、予め設定された目標経路に従って自動走行する作業車両が知られている。例えば、前記作業車両は、圃場の中央部分の内周領域と圃場の外周部分の外周領域(枕地領域)とのそれぞれに設定される目標経路に従って自動走行する(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第7049033号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、作業対象の圃場は、矩形の圃場に限らず、外形の一部(角部など)が斜めの形状の圃場や、外形の一部が曲線の形状の圃場など非矩形状の圃場がある。このような非矩形状の圃場の場合、作業車両を自動走行させる目標経路を生成することが困難になる。
【0005】
本発明の目的は、非矩形状の作業領域において作業車両を自動走行させる目標経路を容易に生成することが可能な経路生成方法、経路生成プログラム、及び経路生成システムを提供することにある。
【課題を解決するための手段】
【0006】
本発明に係る経路生成方法は、作業領域において作業車両を自動走行させる目標経路を生成する方法である。前記経路生成方法は、前記目標経路を生成する際の基準となる第1基準線と、前記第1基準線とは形状又は方位が異なる第2基準線とを設定することと、前記第1基準線の形状又は方位に基づいて、前記作業車両を自動走行させる前記目標経路を生成することと、前記目標経路に含まれる複数の作業経路のうち一又は複数の第1作業経路の形状又は方位を、前記第2基準線の形状又は方位に基づいて設定することと、を実行する。
【0007】
本発明に係る経路生成プログラムは、作業領域において作業車両を自動走行させる目標経路を生成するプログラムである。前記経路生成プログラムは、前記目標経路を生成する際の基準となる第1基準線と、前記第1基準線とは形状又は方位が異なる第2基準線とを設定することと、前記第1基準線の形状又は方位に基づいて、前記作業車両を自動走行させる前記目標経路を生成することと、前記目標経路に含まれる複数の作業経路のうち一又は複数の第1作業経路の形状又は方位を、前記第2基準線の形状又は方位に基づいて設定することと、を一又は複数のプロセッサーに実行させるためのプログラムである。
【0008】
本発明に係る経路生成システムは、作業領域において作業車両を自動走行させる目標経路を生成するシステムであって、設定処理部と生成処理部とを備える。前記設定処理部は、前記目標経路を生成する際の基準となる第1基準線と、前記第1基準線とは形状又は方位が異なる第2基準線とを設定する。前記生成処理部は、前記第1基準線の形状又は方位に基づいて、前記作業車両を自動走行させる前記目標経路を生成し、前記目標経路に含まれる複数の作業経路のうち一又は複数の第1作業経路の形状又は方位を、前記第2基準線の形状又は方位に基づいて設定する。
【発明の効果】
【0009】
本発明によれば、非矩形状の作業領域において作業車両を自動走行させる目標経路を容易に生成することが可能な目標経路を生成する経路生成方法、経路生成プログラム、及び経路生成システムを提供することができる。
【図面の簡単な説明】
【0010】
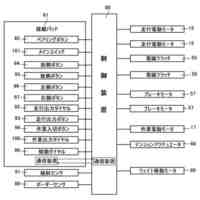
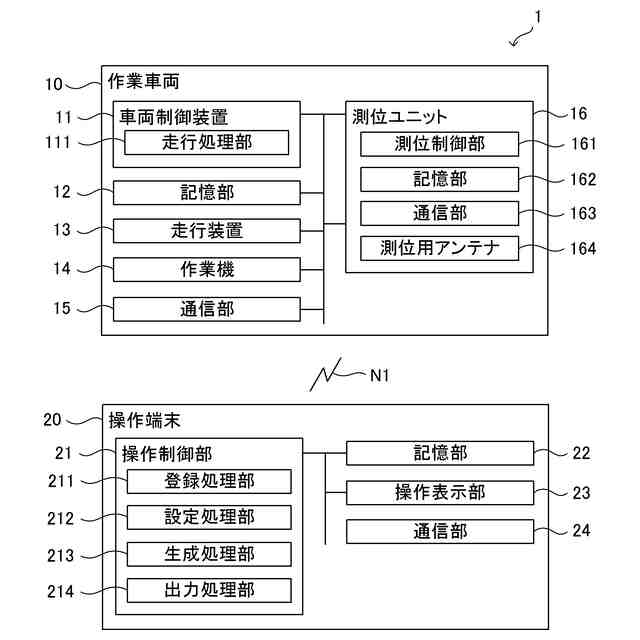
図1は、本発明の実施形態に係る自動走行システムの構成を示すブロック図である。
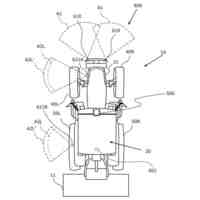
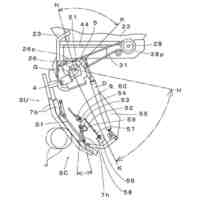
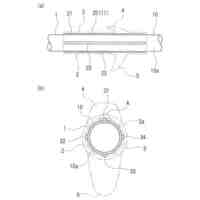
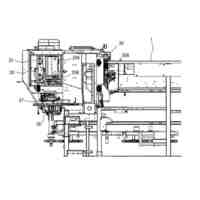
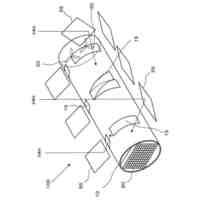
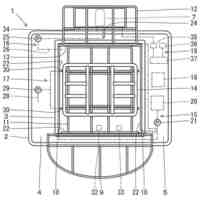
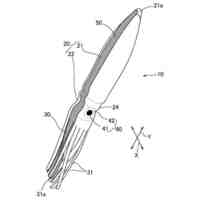
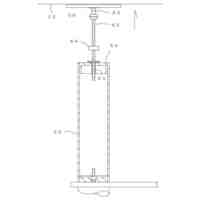
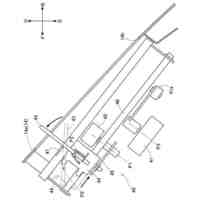
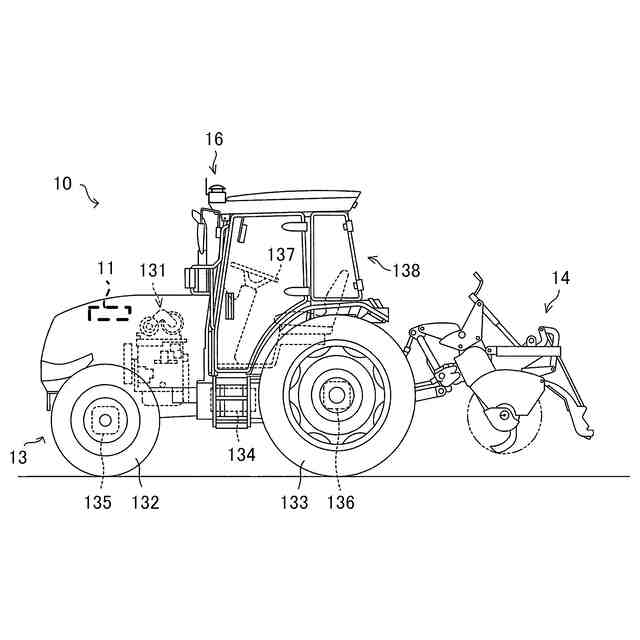
図2は、本発明の実施形態に係る作業車両の構成を示す外観図である。
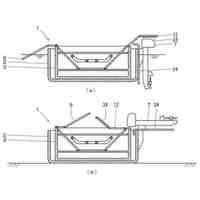
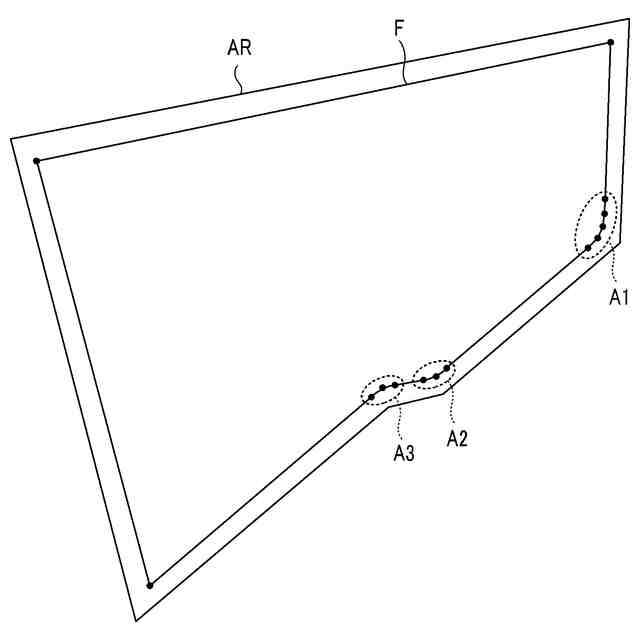
図3は、本発明の実施形態に係る圃場の登録方法の一例を示す図である。
図4は、本発明の実施形態に係る圃場の登録方法の一例を示す図である。
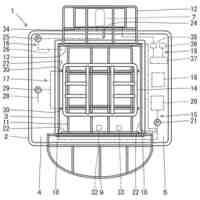
図5は、本発明の実施形態に係る操作端末に表示されるメニュー画面の一例を示す図である。
図6は、本発明の実施形態に係る目標経路の生成方法の一例を示す図である。
図7は、本発明の実施形態に係る目標経路の生成方法の一例を示す図である。
図8は、本発明の実施形態に係る目標経路の生成方法の一例を示す図である。
図9は、本発明の実施形態に係る目標経路の生成方法の一例を示す図である。
図10は、本発明の実施形態に係る自動走行システムによって実行される経路生成処理の手順の一例を示すフローチャートである。
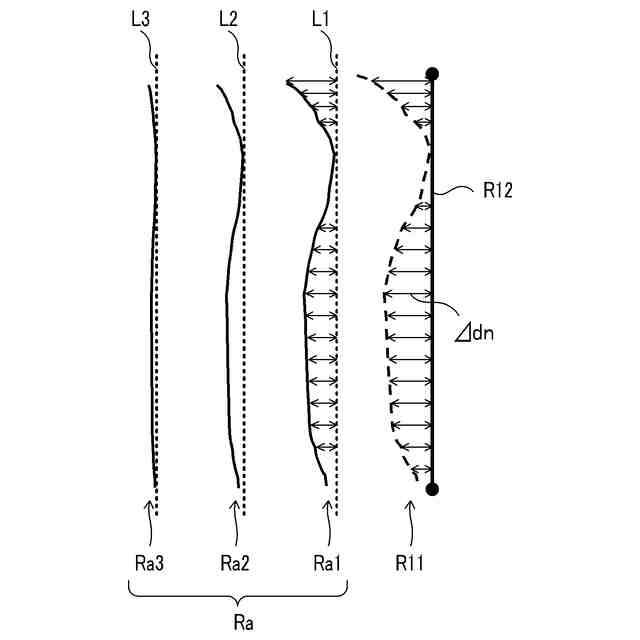
図11は、本発明の他の実施形態に係る目標経路の生成方法の一例を示す図である。
図12は、本発明の他の実施形態に係る目標経路及び作業方向の設定方法の一例を示す図である。
図13は、本発明の他の実施形態に係る目標経路及び作業方向の設定方法の一例を示す図である。
図14は、本発明の他の実施形態に係る目標経路及び作業方向の設定方法の一例を示す図である。
図15は、本発明の他の実施形態に係る目標経路及び作業方向の設定方法の一例を示す図である。
図16は、本発明の他の実施形態に係る目標経路及び作業方向の設定方法の一例を示す図である。
図17は、本発明の他の実施形態に係る目標経路及び作業方向の設定方法の一例を示す図である。
図18は、本発明の他の実施形態に係る目標経路及び作業方向の設定方法の一例を示す図である。
図19は、本発明の他の実施形態に係る目標経路及び作業方向の設定方法の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ルアー
1日前
個人
釣り用ルアー
28日前
個人
釣り用ルアー
28日前
個人
プランターセット
5日前
個人
獣捕獲罠装置
8日前
個人
生命力近親交配方法
5日前
井関農機株式会社
作業車両
29日前
個人
ペット用オムツカバー
12日前
株式会社アテックス
草刈機
13日前
株式会社シマノ
釣竿
12日前
有限会社マイク
囲い罠
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
圃場作業機
1か月前
株式会社シマノ
釣り具
1か月前
井関農機株式会社
歩行型管理機
28日前
個人
植物栽培装置
14日前
株式会社シマノ
釣竿
29日前
株式会社山田鉄工
海苔網処理船
1か月前
株式会社山田鉄工
海苔網処理船
1か月前
株式会社山田鉄工
海苔網処理船
1か月前
株式会社パクマケ
植栽用遮光板
20日前
株式会社フルトン
水中捕捉装置
13日前
株式会社村岡水産
釣り用ワーム
28日前
松山株式会社
草刈作業機
27日前
花王株式会社
抗菌剤組成物
27日前
個人
害虫捕獲、解放及び駆除装置
8日前
鹿島建設株式会社
レインガーデン
2日前
個人
落口枡用取付部材及び落口枡
2日前
鹿島建設株式会社
エビ類育成漁礁
29日前
大栄工業株式会社
誘引剤収容容器
1か月前
井関農機株式会社
水田引水管理システム
28日前
株式会社泰
愛玩動物用タワー家具
15日前
株式会社クボタ
移植機
1か月前
有限会社マドネスジャパン
ポッパー
28日前
株式会社クボタ
収穫機
29日前
株式会社クボタ
移植機
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ