TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025105882
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2025075274,2024060074
出願日
2025-04-30,2020-08-27
発明の名称
基板処理装置、及び基板処理方法
出願人
東京エレクトロン株式会社
代理人
弁理士法人ITOH
主分類
H01L
21/02 20060101AFI20250703BHJP(基本的電気素子)
要約
【課題】基板処理装置のスループットを向上する、技術を提供する。
【解決手段】基板処理装置は、接合装置と、搬送装置と、制御装置とを備える。前記接合装置は、第1基板と第2基板を接合し、重合基板を作製する。前記接合装置は、第1保持部と、第2保持部と、移動機構と、押動部と、変位検出部とを含む。前記移動機構は、前記第1保持部と前記第2保持部との相対位置を移動させる。前記押動部は、前記第2基板と間隔をおいて配置された前記第1基板の中心を押し下げ前記第2基板に接触させる。前記変位検出部は、前記第1基板の中心から離れた点で前記第1保持部に対する前記第1基板の下方への変位を検出する。前記制御装置は、前記押動部による前記第1基板の押し下げ、前記変位検出部による前記変位の検出、及び前記移動機構による前記相対位置の移動開始の少なくとも1つをトリガーとして、前記搬送装置を前記接合装置に対する基板搬入出位置に向けて移動開始させる。
【選択図】図14
特許請求の範囲
【請求項1】
第1基板と第2基板を接合し、重合基板を作製する接合装置と、
前記接合装置に対する前記第1基板及び前記第2基板の搬入、並びに前記重合基板の搬出を行う搬送装置と、
前記接合装置及び前記搬送装置を制御する制御装置と、を備え、
前記接合装置は、前記第1基板を上方から保持する第1保持部と、前記第2基板を下方から保持する第2保持部と、前記第1保持部と前記第2保持部との相対位置を基板受渡位置と接合位置との間で移動させる移動機構と、前記第2基板と間隔をおいて配置された前記第1基板の中心を押し下げ前記第2基板に接触させる押動部と、前記第1基板の中心から離れた点で前記第1保持部に対する前記第1基板の下方への変位を検出する変位検出部と、を含み、
前記制御装置は、前記押動部による前記第1基板の押し下げ、前記変位検出部による前記変位の検出、及び前記移動機構による前記相対位置の前記接合位置から前記基板受渡位置への移動開始の少なくとも1つをトリガーとして、前記搬送装置を前記接合装置に対する基板搬入出位置に向けて移動開始させる、基板処理装置。
続きを表示(約 1,000 文字)
【請求項2】
前記変位検出部は、複数設けられ、前記第1基板の中心からの距離が異なる複数の点で前記変位を検出し、
前記制御装置は、複数の前記変位検出部によって、前記第1基板と前記第2基板の接合の進行速度を求める、又は前記第1基板と前記第2基板の接合の成否を判断する、請求項1に記載の基板処理装置。
【請求項3】
前記第1基板と前記第2基板の接合の進行速度は、異方性を有しており、
前記変位検出部は、前記進行速度が最も速い方位と、前記進行速度が最も遅い方位との両方に設けられる、請求項1又は2に記載の基板処理装置。
【請求項4】
前記制御装置は、前記押動部による前記第1基板の押し下げの開始から、設定時間経過後に、前記搬送装置を前記基板搬入出位置に向けて移動開始させる、請求項1~3のいずれか1項に記載の基板処理装置。
【請求項5】
前記制御装置は、1点以上での前記変位検出部による前記変位の検出から、設定時間経過後に、前記搬送装置を前記基板搬入出位置に向けて移動開始させる、請求項1~3のいずれか1項に記載の基板処理装置。
【請求項6】
前記制御装置は、前記移動機構による前記相対位置の前記接合位置から前記基板受渡位置への移動開始から、設定時間経過後に、前記搬送装置を前記基板搬入出位置に向けて移動開始させる、請求項1~3のいずれか1項に記載の基板処理装置。
【請求項7】
前記変位検出部は、前記第1保持部と前記第1基板の距離を測定する、請求項1~6のいずれか1項に記載の基板処理装置。
【請求項8】
前記第1保持部は、気体を吸引する又は吐出するノズルを含み、
前記変位検出部は、前記ノズルの気体の流量を検出し、前記第1保持部と前記第1基板の距離を測定する、請求項7に記載の基板処理装置。
【請求項9】
前記変位検出部は、超音波、光、又は画像で、前記第1保持部と前記第1基板の距離を測定する、請求項7に記載の基板処理装置。
【請求項10】
前記変位検出部は、
前記第1基板からの反射光を受光し、その受光量で前記第1保持部と前記第1基板の距離を測定するか、
又は、前記変位検出部と前記第1基板の静電容量を測定することで、前記第1保持部と前記第1基板の距離を測定する、請求項7に記載の基板処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、基板処理装置、及び基板処理方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特許文献1~3に記載の接合システムは、第1基板と第2基板を接合し、重合基板を作製する。接合システムは、表面改質装置と、表面親水化装置と、接合装置と、搬送装置とを備える。表面改質装置は、第1基板と第2基板を改質する。表面親水化装置は、改質された第1基板と第2基板を親水化する。接合装置は、親水化された第1基板と第2基板を接合し、重合基板を作製する。搬送装置は、第1基板、第2基板及び重合基板を搬送する。
【先行技術文献】
【特許文献】
【0003】
特開2018-10922号公報
特開2018-26414号公報
特開2018-93018号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示の一態様は、基板処理装置のスループットを向上する、技術を提供する。
【課題を解決するための手段】
【0005】
本開示の一態様に係る基板処理装置は、接合装置と、搬送装置と、制御装置とを備える。前記接合装置は、第1基板と第2基板を接合し、重合基板を作製する。前記搬送装置は、前記接合装置に対する前記第1基板及び前記第2基板の搬入、並びに前記重合基板の搬出を行う。前記制御装置は、前記接合装置及び前記搬送装置を制御する。前記接合装置は、第1保持部と、第2保持部と、移動機構と、押動部と、変位検出部とを含む。前記第1保持部は、前記第1基板を上方から保持する。前記第2保持部は、前記第2基板を下方から保持する。前記移動機構は、前記第1保持部と前記第2保持部との相対位置を基板受渡位置と接合位置との間で移動させる。前記押動部は、前記第2基板と間隔をおいて配置された前記第1基板の中心を押し下げ前記第2基板に接触させる。前記変位検出部は、前記第1基板の中心から離れた点で前記第1保持部に対する前記第1基板の下方への変位を検出する。前記制御装置は、前記押動部による前記第1基板の押し下げ、前記変位検出部による前記変位の検出、及び前記移動機構による前記相対位置の前記接合位置から前記基板受渡位置への移動開始の少なくとも1つをトリガーとして、前記搬送装置を前記接合装置に対する基板搬入出位置に向けて移動開始させる。
【発明の効果】
【0006】
本開示の一態様によれば、基板処理装置のスループットを向上できる。
【図面の簡単な説明】
【0007】
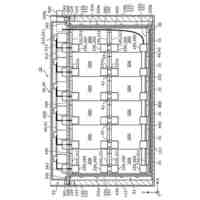
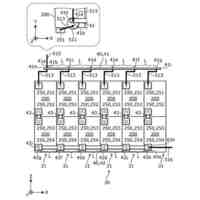
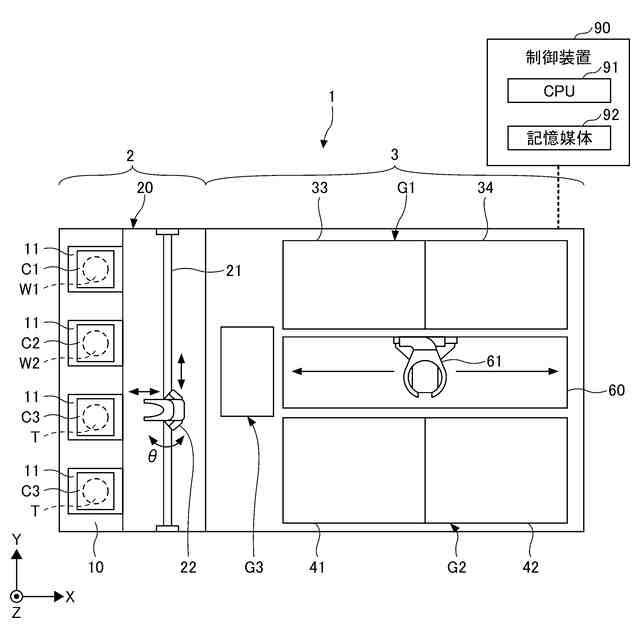
図1は、一実施形態に係る基板処理装置を示す平面図である。
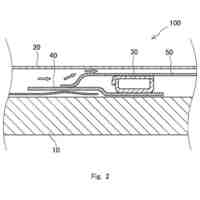
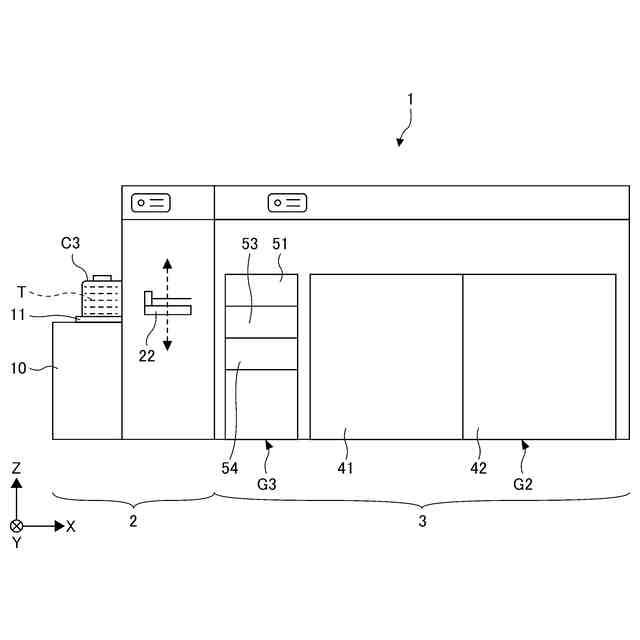
図2は、図1の基板処理装置の正面図である。
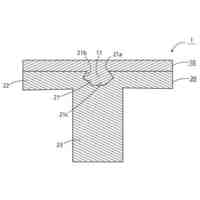
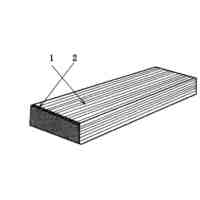
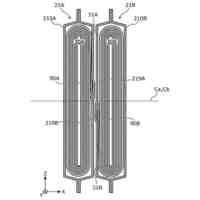
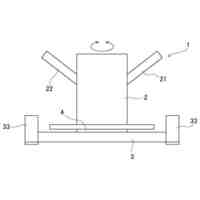
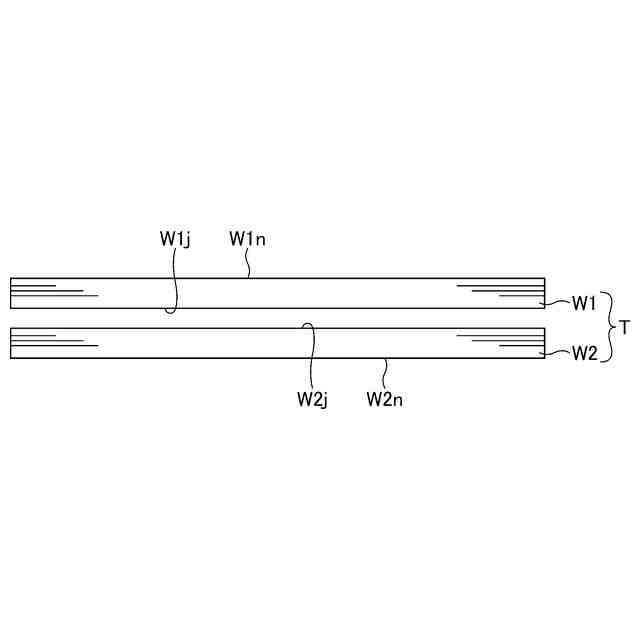
図3は、第1基板及び第2基板の一例を示す側面図である。
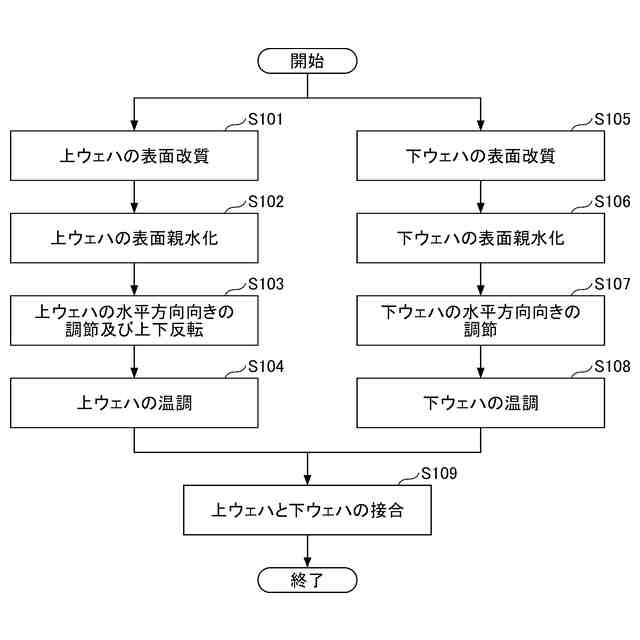
図4は、一実施形態に係る基板処理方法を示すフローチャートである。
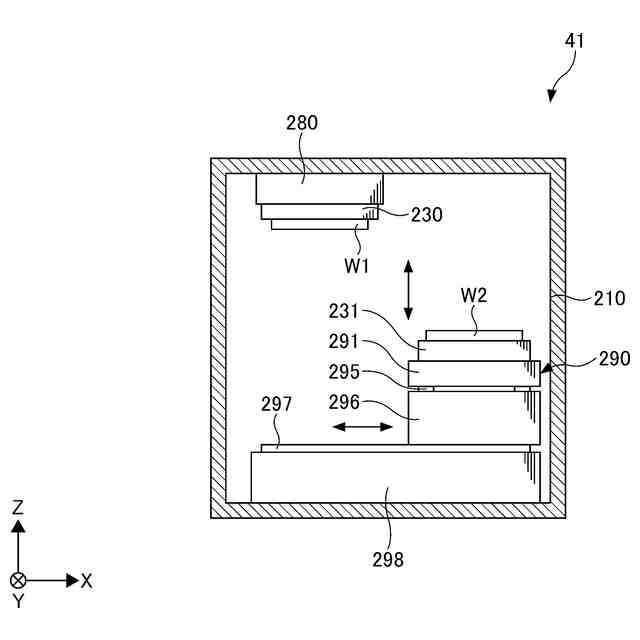
図5は、搬送装置の一例を示す側面図である。
図6は、位置調節装置の一例を示す側面図である。
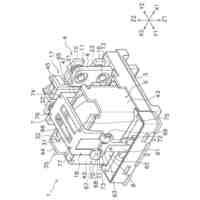
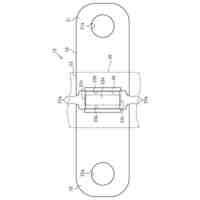
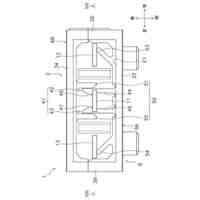
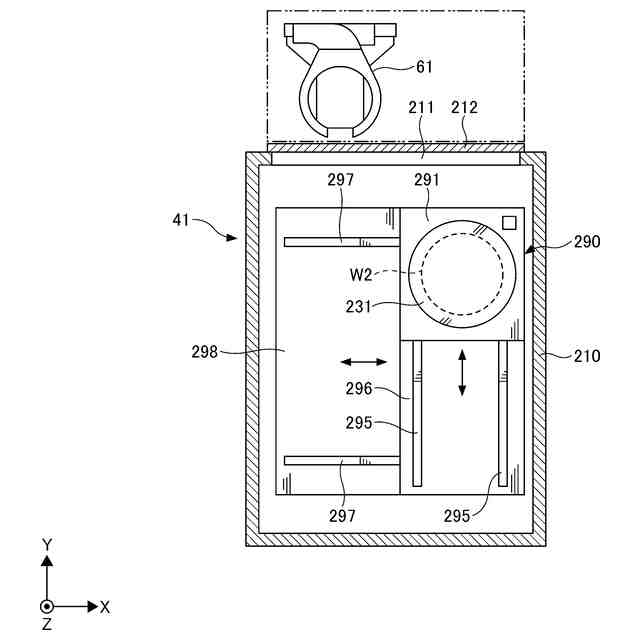
図7は、接合装置の一例を示す平面図である。
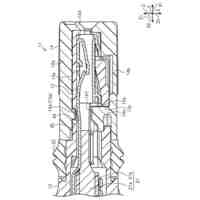
図8は、図7の接合装置の正面断面図である。
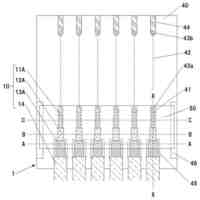
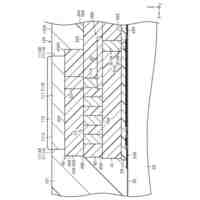
図9は、図7の第1保持部及び第2保持部を示す正面断面図である。
図10は、図4のステップS109の詳細を示すフローチャートである。
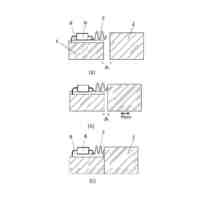
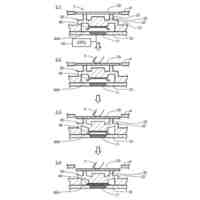
図11(A)は接合の進行開始時の一例を示す断面図であり、図11(B)は接合の進行途中の一例を示す断面図であり、図11(C)は接合の進行完了時の一例を示す断面図である。
図12は、接合の進行速度の異方性の一例を示す平面図である。
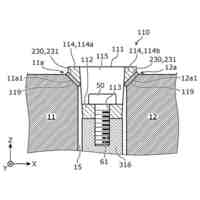
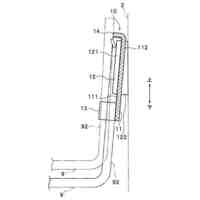
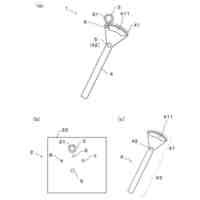
図13は、ノズルの一例を示す断面図である。
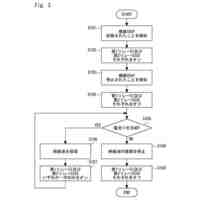
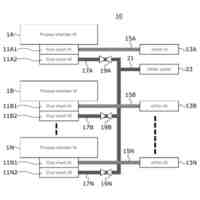
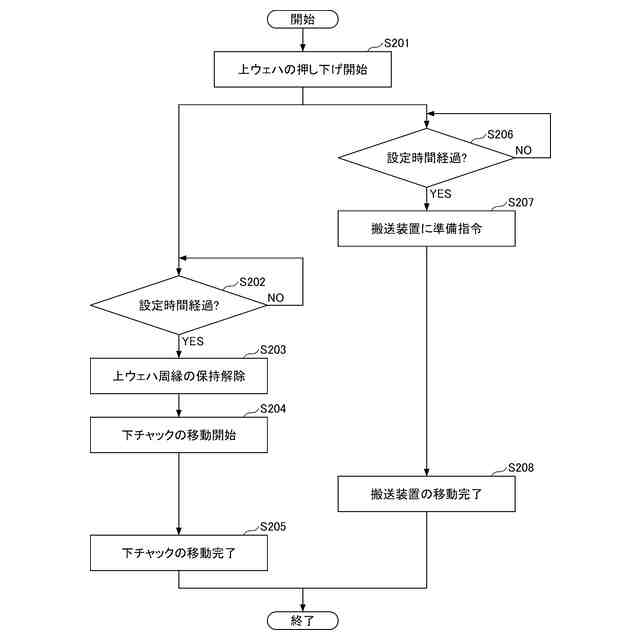
図14は、搬送装置に対して準備指令を送信するタイミングの第1例を示すフローチャートである。
図15は、搬送装置に対して準備指令を送信するタイミングの第2例を示すフローチャートである。
図16は、搬送装置に対して準備指令を送信するタイミングの第3例を示すフローチャートである。
【発明を実施するための形態】
【0008】
以下、本開示の実施形態について図面を参照して説明する。なお、各図面において同一の又は対応する構成には同一の符号を付し、説明を省略することがある。また、X軸方向、Y軸方向及びZ軸方向は互いに垂直な方向であり、X軸方向及びY軸方向は水平方向、Z軸方向は鉛直方向である。
【0009】
先ず、図1及び図2を参照して、本実施形態に係る基板処理装置1について説明する。基板処理装置1は、第1基板W1と第2基板W2とを接合し、重合基板Tを作製する。第1基板W1は、例えばシリコンウェハや化合物半導体ウェハなどの半導体基板に複数の電子回路が形成された基板である。また、第2基板W2は、例えば電子回路が形成されていないベアウェハである。なお、第2基板W2も、第1基板W1と同様に、電子回路が形成された基板であってもよい。第1基板W1と第2基板W2とは、略同径を有する。化合物半導体ウェハは、特に限定されないが、例えばGaAsウェハ、SiCウェハ、GaNウェハ、又はInPウェハである。
【0010】
以下、第1基板W1を「上ウェハW1」と記載し、第2基板W2を「下ウェハW2」、重合基板Tを「重合ウェハT」と記載する場合がある。図3に示すように、上ウェハW1の板面のうち、下ウェハW2と接合される側の板面を「接合面W1j」と記載し、接合面W1jとは反対側の板面を「非接合面W1n」と記載する。また、下ウェハW2の板面のうち、上ウェハW1と接合される側の板面を「接合面W2j」と記載し、接合面W2jとは反対側の板面を「非接合面W2n」と記載する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
端子部品
1か月前
株式会社潤工社
同軸ケーブル
18日前
株式会社ExH
電流開閉装置
20日前
レナタ・アーゲー
電池
1か月前
個人
鉄心用材料とその製造方法
25日前
株式会社クオルテック
空気電池
1か月前
個人
マルチバンドコイルアンテナ
5日前
エイブリック株式会社
半導体装置
20日前
株式会社メルビル
ステージ
27日前
株式会社GSユアサ
蓄電装置
20日前
三菱電機株式会社
漏電遮断器
1か月前
株式会社GSユアサ
蓄電装置
25日前
三洲電線株式会社
撚線
1か月前
株式会社GSユアサ
蓄電装置
18日前
株式会社GSユアサ
蓄電装置
25日前
オムロン株式会社
電磁継電器
21日前
豊田鉄工株式会社
コイル部品
1か月前
株式会社GSユアサ
蓄電装置
25日前
株式会社GSユアサ
蓄電装置
25日前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
25日前
住友電装株式会社
端子台
19日前
日星電気株式会社
ケーブルアセンブリ
19日前
トヨタ自動車株式会社
電源装置
20日前
中国電力株式会社
移動用変圧器
1か月前
オムロン株式会社
スイッチ装置
18日前
株式会社ダイヘン
変圧器
11日前
東洋電装株式会社
操作装置
21日前
住友電装株式会社
コネクタ
25日前
中国電力株式会社
断路器操作構造
21日前
エドワーズ株式会社
冷却システム
25日前
ローム株式会社
チップ部品
20日前
トヨタ自動車株式会社
電池パック
20日前
住友電装株式会社
コネクタ
25日前
ローム株式会社
チップ部品
3日前
ローム株式会社
チップ部品
3日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ