TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025097096
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2023213176
出願日
2023-12-18
発明の名称
基板処理装置および基板処理方法
出願人
株式会社荏原製作所
代理人
個人
,
個人
,
個人
,
個人
主分類
H01L
21/677 20060101AFI20250623BHJP(基本的電気素子)
要約
【課題】ウェハの形状異常を決定することができる基板処理装置が提供される。
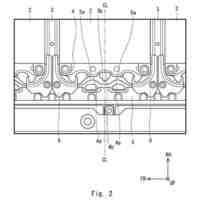
【解決手段】基板処理装置は、基板の表面形状に応じた信号を検出する形状検出モジュールと、基板の形状異常を決定する制御装置と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
基板処理装置であって、
基板を処理する処理モジュールと、
前記基板を前記処理モジュールに搬送する搬送ロボットと、
前記搬送ロボットに保持された前記基板の表面形状に応じた信号を検出する形状検出モジュールと、
前記形状検出モジュールによって検出された信号に基づいて、前記基板の形状異常を決定する制御装置と、を備え、
前記形状検出モジュールは、前記搬送ロボットに連結されており、かつ前記搬送ロボットの上方で前記信号を検出するように構成されている、基板処理装置。
続きを表示(約 1,400 文字)
【請求項2】
前記形状検出モジュールは、
前記搬送ロボットに保持された前記基板の上方に配置された検出センサと、
前記基板の表面上における移動軌跡に沿って、前記検出センサを移動させるセンサ移動アクチュエータと、を備えている、請求項1に記載の基板処理装置。
【請求項3】
前記搬送ロボットは、前記基板を回転させるように構成されており、
前記形状検出モジュールは、
前記搬送ロボットに保持された前記基板の周縁部の上方に配置された固定センサと、
前記搬送ロボットに保持された前記基板と平行な方向に移動可能な可動センサと、
前記可動センサを前記周縁部から前記基板の中心まで往復移動させるセンサ移動アクチュエータと、を備えている、請求項1に記載の基板処理装置。
【請求項4】
前記形状検出モジュールは、前記搬送ロボットが前記基板を搬送しているときに、前記信号を検出するように構成されている、請求項1に記載の基板処理装置。
【請求項5】
前記形状検出モジュールを第1形状検出モジュールと定義し、前記搬送ロボットを第1搬送ロボットと定義した場合、
前記第1搬送ロボットは、前記基板を研磨モジュールに搬送するように構成されており、
前記基板処理装置は、
前記研磨モジュールで研磨処理された前記基板を洗浄モジュールに搬送する第2搬送ロボットと、
前記第2搬送ロボットに連結され、かつ前記第2搬送ロボットに保持された前記基板の表面形状に応じた信号を検出する第2形状検出モジュールと、を備えている、請求項1に記載の基板処理装置。
【請求項6】
前記第1形状検出モジュールおよび前記第2形状検出モジュールは、前記基板の同一の面の形状を検出するように構成されている、請求項5に記載の基板処理装置。
【請求項7】
前記基板処理装置は、前記研磨モジュールと前記洗浄モジュールとの間における前記基板の搬送経路に配置された流体噴射装置を備えており、
前記流体噴射装置は、前記基板の、前記第2形状検出モジュールの検出対象となる面に圧縮流体を吹き付ける流体噴射ノズルを備えている、請求項5に記載の基板処理装置。
【請求項8】
前記制御装置は、
前記形状検出モジュールから取得した前記信号に基づいて、前記形状異常の判断対象となる前記基板の形状情報を取得し、
取得した前記形状情報と所定の判定基準とを比較して、前記形状異常を決定する、請求項1に記載の基板処理装置。
【請求項9】
前記制御装置は、
前記形状検出モジュールから過去に取得した複数の信号に基づいて算出された複数の値から正規分布を作成し、
前記正規分布の平均値から±Xσの範囲を前記判定基準に決定する、請求項8に記載の基板処理装置。
【請求項10】
基板処理方法であって、
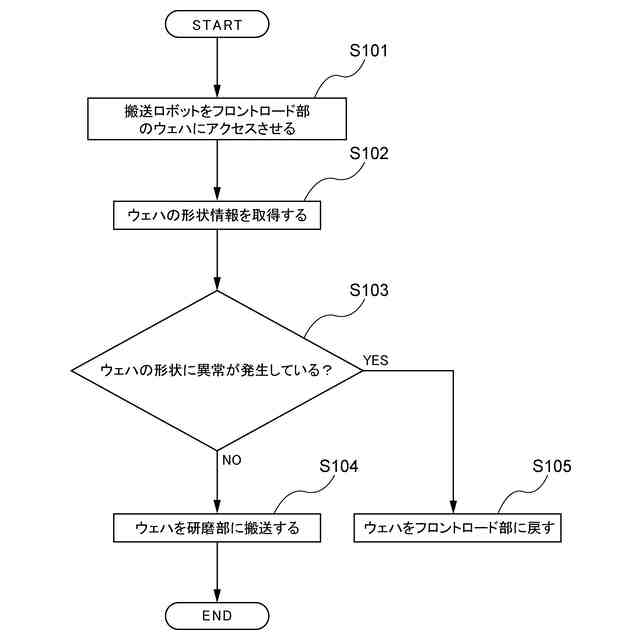
基板を処理モジュールに搬送する搬送ロボットに連結された形状検出モジュールによって、前記搬送ロボットに保持された前記基板の表面形状に応じた信号を、前記搬送ロボットの上方で検出し、
前記形状検出モジュールによって検出された信号に基づいて、前記基板の形状異常を決定する、基板処理方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、基板処理装置および基板処理方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
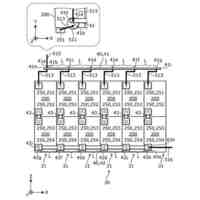
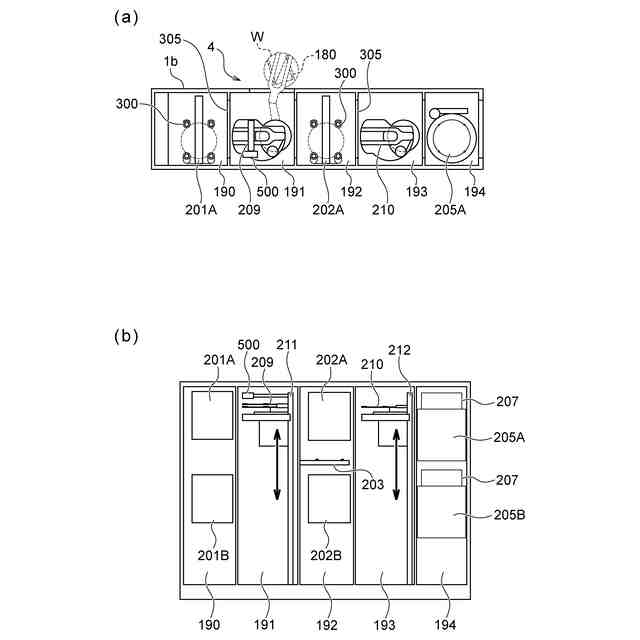
ウェハなどの基板を処理する基板処理装置が知られている。このような基板処理装置では、ウェハは、様々な処理モジュールに搬送され、各処理モジュールで処理される。
【先行技術文献】
【特許文献】
【0003】
特開平11-251401号公報
特開2016-92330号公報
特開2018-3085号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ウェハは、その表面に、欠けや変形(例えば、反り、歪み)などの形状異常を有している場合がある。ウェハを各処理モジュールで処理することにより、ウェハの表面に形状異常が生じる場合がある。
【0005】
このような形状異常を有するウェハを搬送すると、搬送ロボットはウェハを適切に搬送することができず、ウェハの搬送エラーが生じてしまうおそれがある。形状異常を有するウェハを処理モジュールで処理すると、ウェハの形状異常に起因して、ウェハが破損してしまうおそれがある。このような問題が生じた場合には、基板処理装置を一時的に停止しなければならず、結果として、ウェハのスループットが著しく低下してしまう。
【0006】
そこで、本発明は、ウェハの形状異常を決定することができる基板処理装置および基板処理方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
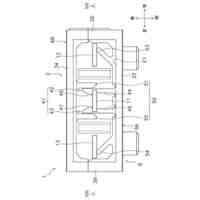
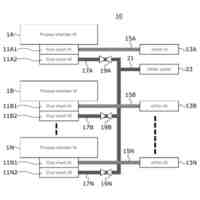
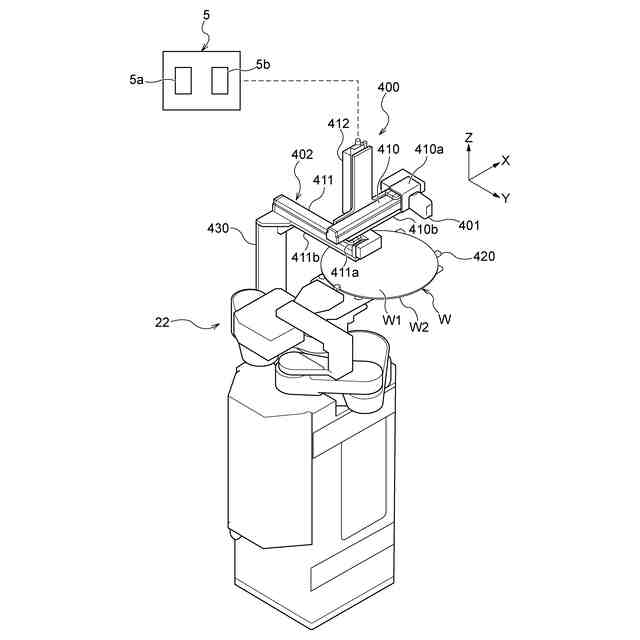
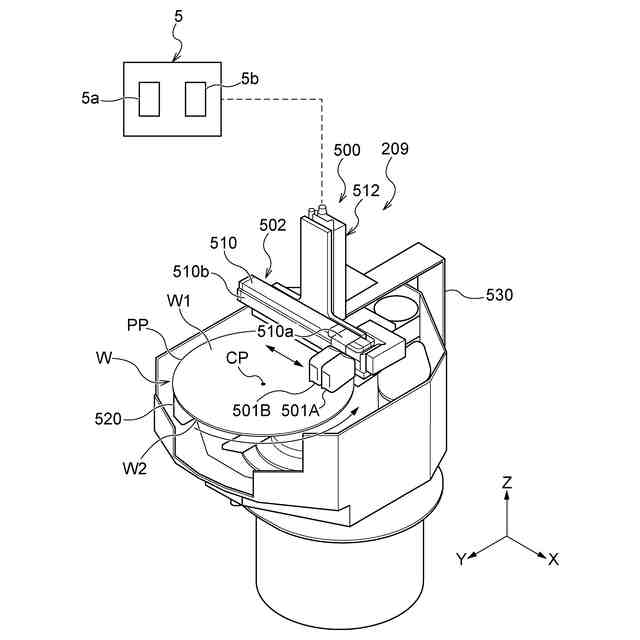
一態様では、基板を処理する処理モジュールと、前記基板を前記処理モジュールに搬送する搬送ロボットと、前記搬送ロボットに保持された前記基板の表面形状に応じた信号を検出する形状検出モジュールと、前記形状検出モジュールによって検出された信号に基づいて、前記基板の形状異常を決定する制御装置と、を備える基板処理装置が提供される。前記形状検出モジュールは、前記搬送ロボットに連結されており、かつ前記搬送ロボットの上方で前記信号を検出するように構成されている。
【0008】
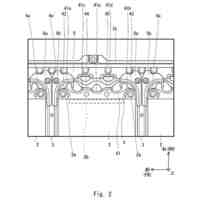
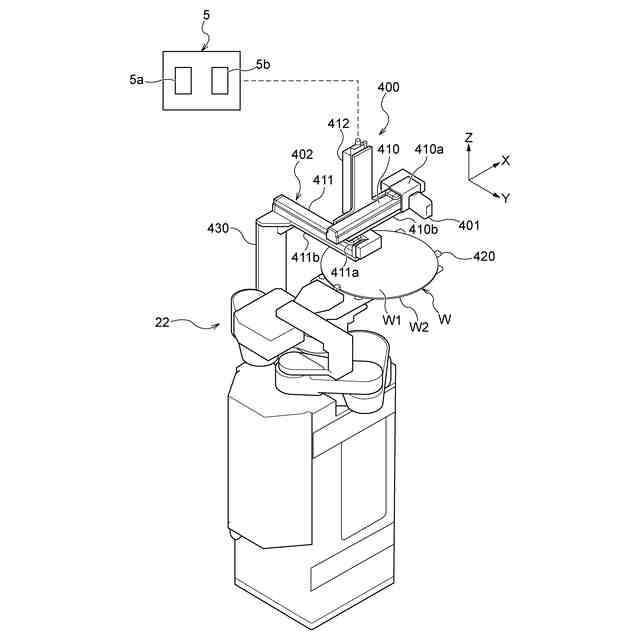
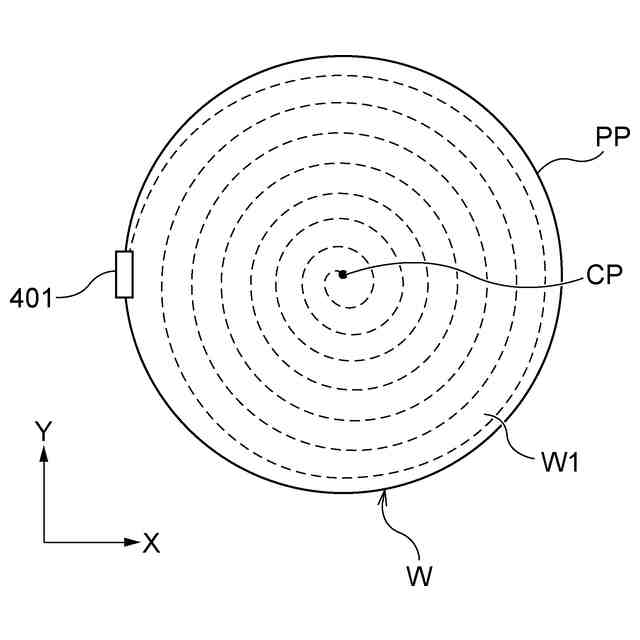
一態様では、前記形状検出モジュールは、前記搬送ロボットに保持された前記基板の上方に配置された検出センサと、前記基板の表面上における移動軌跡に沿って、前記検出センサを移動させるセンサ移動アクチュエータと、を備えている。
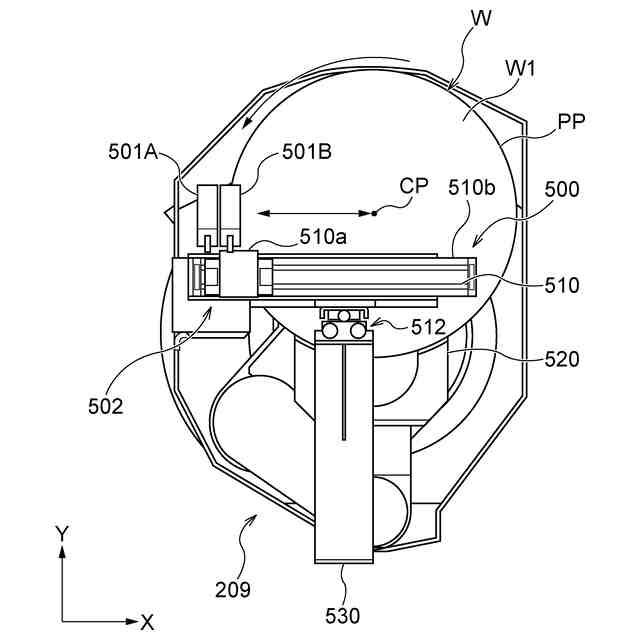
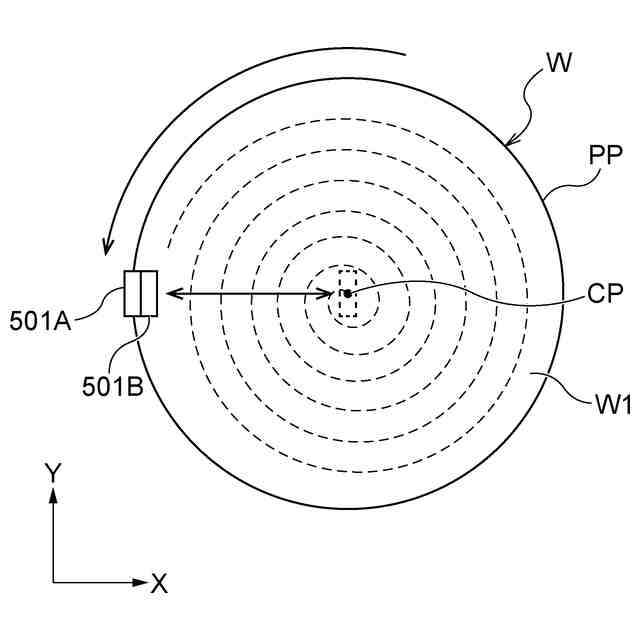
一態様では、前記搬送ロボットは、前記基板を回転させるように構成されており、前記形状検出モジュールは、前記搬送ロボットに保持された前記基板の周縁部の上方に配置された固定センサと、前記搬送ロボットに保持された前記基板と平行な方向に移動可能な可動センサと、前記可動センサを前記周縁部から前記基板の中心まで往復移動させるセンサ移動アクチュエータと、を備えている。
一態様では、前記形状検出モジュールは、前記搬送ロボットが前記基板を搬送しているときに、前記信号を検出するように構成されている。
【0009】
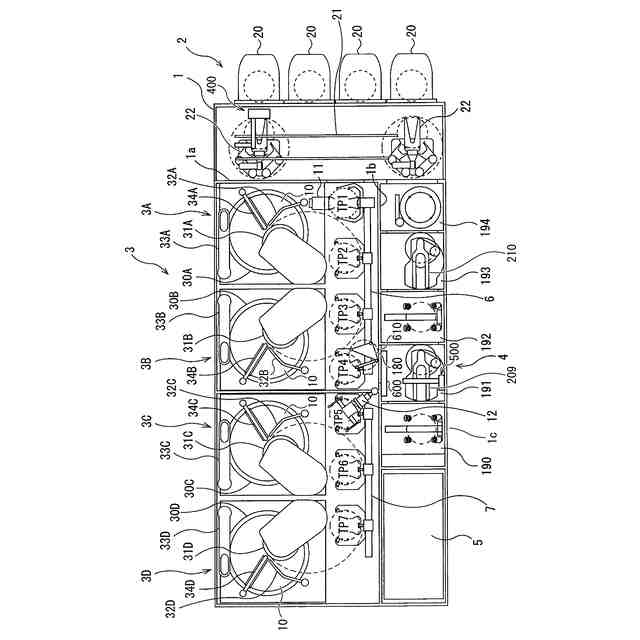
一態様では、前記形状検出モジュールを第1形状検出モジュールと定義し、前記搬送ロボットを第1搬送ロボットと定義した場合、前記第1搬送ロボットは、前記基板を研磨モジュールに搬送するように構成されており、前記基板処理装置は、前記研磨モジュールで研磨処理された前記基板を洗浄モジュールに搬送する第2搬送ロボットと、前記第2搬送ロボットに連結され、かつ前記第2搬送ロボットに保持された前記基板の表面形状に応じた信号を検出する第2形状検出モジュールと、を備えている。
【0010】
一態様では、前記第1形状検出モジュールおよび前記第2形状検出モジュールは、前記基板の同一の面の形状を検出するように構成されている。
一態様では、前記基板処理装置は、前記研磨モジュールと前記洗浄モジュールとの間における前記基板の搬送経路に配置された流体噴射装置を備えており、前記流体噴射装置は、前記基板の、前記第2形状検出モジュールの検出対象となる面に圧縮流体を吹き付ける流体噴射ノズルを備えている。
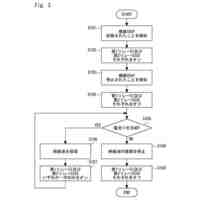
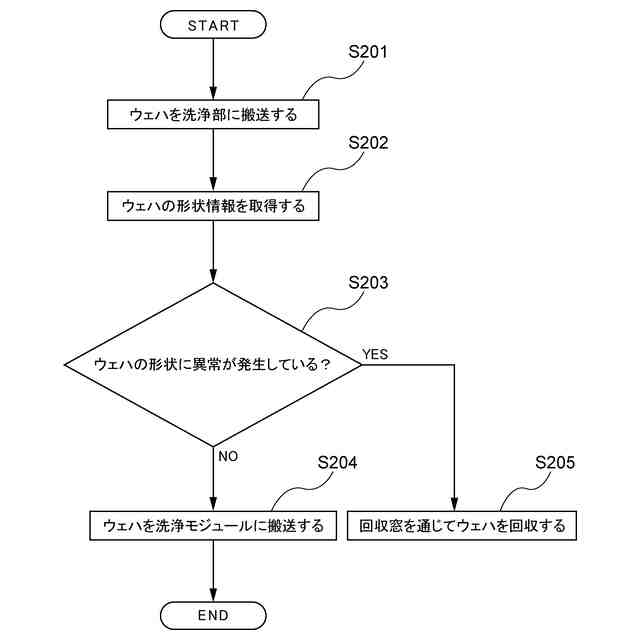
一態様では、前記制御装置は、前記形状検出モジュールから取得した前記信号に基づいて、前記形状異常の判断対象となる前記基板の形状情報を取得し、取得した前記形状情報と所定の判定基準とを比較して、前記形状異常を決定する。
一態様では、前記制御装置は、前記形状検出モジュールから過去に取得した複数の信号に基づいて算出された複数の値から正規分布を作成し、前記正規分布の平均値から±Xσの範囲を前記判定基準に決定する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社荏原製作所
給水装置
1日前
株式会社荏原製作所
研磨用スラリー及び研磨方法
1日前
株式会社ExH
電流開閉装置
25日前
株式会社潤工社
同軸ケーブル
23日前
個人
鉄心用材料とその製造方法
1か月前
エイブリック株式会社
半導体装置
25日前
個人
マルチバンドコイルアンテナ
10日前
株式会社メルビル
ステージ
1か月前
矢崎総業株式会社
電線
5日前
株式会社大阪ソーダ
複合固体電解質
4日前
株式会社GSユアサ
蓄電装置
25日前
株式会社GSユアサ
蓄電装置
1日前
株式会社GSユアサ
蓄電装置
1か月前
オムロン株式会社
電磁継電器
26日前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
23日前
株式会社GSユアサ
蓄電素子
4日前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
住友電装株式会社
端子台
24日前
日星電気株式会社
ケーブルアセンブリ
24日前
ダイハツ工業株式会社
固定治具
4日前
日本特殊陶業株式会社
保持装置
2日前
株式会社ダイヘン
変圧器
16日前
オムロン株式会社
スイッチ装置
23日前
トヨタ自動車株式会社
電源装置
25日前
トヨタ自動車株式会社
電池パック
10日前
ローム株式会社
チップ部品
8日前
東洋電装株式会社
操作装置
26日前
ローム株式会社
チップ部品
25日前
トヨタ自動車株式会社
電池パック
10日前
トヨタ自動車株式会社
電池パック
25日前
エドワーズ株式会社
冷却システム
1か月前
東レエンジニアリング株式会社
実装装置
5日前
個人
“hi-light surf.”
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ