TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025096788
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2023212700
出願日
2023-12-18
発明の名称
モータ制御装置
出願人
株式会社デンソー
代理人
弁理士法人服部国際特許事務所
主分類
H02M
7/48 20070101AFI20250623BHJP(電力の発電,変換,配電)
要約
【課題】冗長構成における基板配線を簡素化可能なモータ制御装置を提供する。
【解決手段】ECU15は、複数のモータ巻線121~124を有するモータ11を駆動するものであって、複数のドライバ部品701~704と、基板75と、を備える。ドライバ部品701~704は、高電位側に接続される上アーム素子が内蔵されているハイサイドチップ、上アーム素子の低電位側に接続される下アーム素子が内蔵されているローサイドチップ、および、制御チップを有する。制御チップは、プリドライバIC61~64が内蔵されている。ドライバ部品701~704は、基板75上において、それぞれのモータ巻線121~124の通電制御に係る部品ごとに領域を分けて配置されており、一方側から、制御チップ、ハイサイドチップおよびローサイドチップ、モータ巻線121~124が接続されるモータ線接続部の順で配列されている。
【選択図】 図9
特許請求の範囲
【請求項1】
複数のモータ巻線(121~124)を有するモータ(11)を駆動するモータ制御装置であって、
高電位側に接続される上アーム素子(511~513、521~523)が内蔵されているハイサイドチップ(712)、前記上アーム素子の低電位側に接続される下アーム素子(514~516、524~526)が内蔵されているローサイドチップ(713)、および、前記上アーム素子と前記下アーム素子とに駆動信号を出力するプリドライバIC(61~64)が内蔵されている制御チップ(711)を有する複数のドライバ部品(701~707、73)と、
前記ドライバ部品が実装される基板(75)と、
を備え、
前記ドライバ部品は、前記基板上において、それぞれの前記モータ巻線の通電制御に係る部品ごとに領域を分けて配置されており、一方側から、前記制御チップ、前記ハイサイドチップおよび前記ローサイドチップ、前記モータ巻線が接続されるモータ線接続部の順で配列されているモータ制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記基板上において、径方向内側から、前記制御チップ、前記ハイサイドチップおよび前記ローサイドチップ、前記モータ線接続部の順に配列されている請求項1に記載のモータ制御装置。
【請求項3】
前記基板上において、径方向外側から、前記制御チップ、前記ハイサイドチップおよび前記ローサイドチップ、前記モータ線接続部の順に配列されている請求項1に記載のモータ制御装置。
【請求項4】
前記モータ巻線、および、前記ドライバ部品は、4組ずつ設けられ、第1基板中心線(D1)と前記第1基板中心線に直交する第2基板中心線(D2)とで区画される領域にそれぞれ配置されており、
各領域において、前記モータ線接続部が前記第1基板中心線側、前記制御チップが前記第2基板中心線側となるように配置されている請求項1に記載のモータ制御装置。
【請求項5】
前記ローサイドチップは、前記ハイサイドチップの一部が重ならないようにずらした状態にて、対になる前記ハイサイドチップに積層されている請求項1~4のいずれか一項に記載のモータ制御装置。
【請求項6】
前記制御チップは、前記ハイサイドチップおよび前記ローサイドチップとともに封止部(749)に一体に封止されている請求項1に記載のモータ制御装置。
【請求項7】
前記基板には、複数の電源(501、502)から電力が供給されており、
前記電源が異なる領域に設けられる部品間を接続する箇所に設けられるアイソレータ(28)を備える請求項1に記載のモータ制御装置。
【請求項8】
前記上アーム素子および前記下アーム素子は、ブリッジ接続されてドライバ回路(51~54)を構成しており、
1つの前記モータ巻線に対し、複数の前記ドライバ回路が設けられている請求項1に記載のモータ制御装置。
【請求項9】
前記モータ巻線の同相に接続される異なる前記ドライバ回路の前記ハイサイドチップおよび前記ローサイドチップは、隣接して配置されている請求項8に記載のモータ制御装置。
【請求項10】
前記モータ線接続部と前記ドライバ部品との間には、前記モータの駆動に用いる前記ドライバ回路を切り替えるスイッチ部(131~134)が設けられている請求項8または9に記載のモータ制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ制御装置に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
従来、2組のモータ巻線を有するモータを制御するモータ制御装置が知られている。例えば特許文献1では、モータ巻線に対応してインバータ回路および制御部が設けられる2系統の構成になっている。
【先行技術文献】
【特許文献】
【0003】
特開2018-129995号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、1故障発生中の制御継続中に更なる故障が発生した場合、モータの駆動を継続できない虞がある。ここで、機能安全性の面から、例えば4系統等、更なる冗長化をした場合、配線が複雑化する虞がある。
【0005】
本発明は、上述の課題に鑑みてなされたものであり、その目的は、冗長構成における基板配線を簡素化可能なモータ制御装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明のモータ制御装置は、複数のモータ巻線(121~124)を有するモータ(11)を駆動するモータ制御装置であって、複数のドライバ部品(701~707、73)と、基板(75)と、を備える。ドライバ部品は、高電位側に接続される上アーム素子(511~513、521~523)が内蔵されているハイサイドチップ(712)、上アーム素子の低電位側に接続される下アーム素子(514~516、524~526)が内蔵されているローサイドチップ(713)、および、上アーム素子と下アーム素子とに駆動信号を出力するプリドライバIC(61~64)が内蔵されている制御チップ(711)を有する。
【0007】
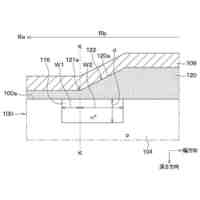
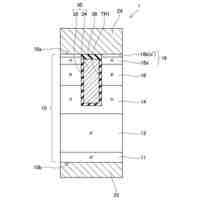
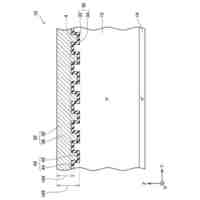
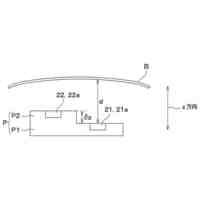
ドライバ部品は、基板上において、それぞれのモータ巻線の通電制御に係る部品ごとに領域を分けて配置されており、一方側から、制御チップ、ハイサイドチップおよびローサイドチップ、モータ巻線が接続されるモータ線接続部の順で配列されている。これにより、ドライバ部品とモータ巻線との基板配線を簡素化することができる。
【図面の簡単な説明】
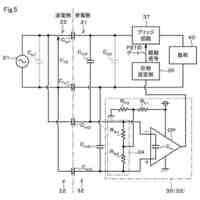
【0008】
第1実施形態による電動パワーステアリング装置を示す概略構成図である。
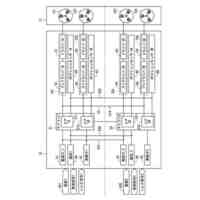
第1実施形態によるECUを示すブロック図である。
第1実施形態によるドライバ回路を説明する回路図である。
第1実施形態によるドライバ部品を説明する回路図である。
第1実施形態によるドライバ部品を説明する回路図である。
第1実施形態によるドライバ部品を説明する回路図である。
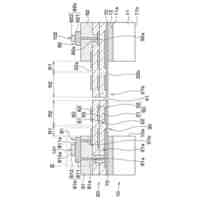
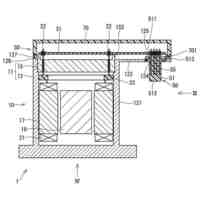
第1実施形態によるドライバ部品を示す平面図である。
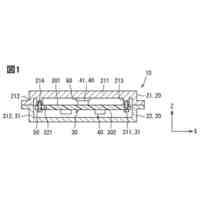
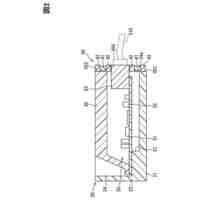
図7のVIII-VIII線断面図である。
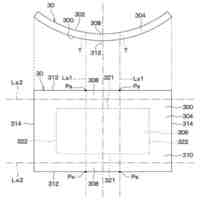
第1実施形態による基板配置を説明する模式図である。
第1実施形態による基板配置を説明する模式図である。
第1実施形態による基板配置を説明する模式図である。
2系統でのマイコンと部品との接続を説明する説明図である。
3系統でのマイコンと部品との接続を説明する説明図である。
第1実施形態による系統間接続線を示す説明図である。
第1実施形態によるアイソレータを示す説明図である。
第1実施形態によるマイコンとドライバ部品との通信構成を説明する説明図である。
第1実施形態によるマイコンとドライバ部品との通信構成を説明する説明図である。
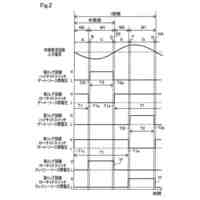
第1実施形態によるデータ通信を説明するタイムチャートである。
モータ巻線を2系統とする場合の配置を示す模式図である。
モータ巻線を4系統とする場合の配置を示す模式図である。
第1実施形態による演算コアとプリドライバICとの通信を説明するタイムチャートである。
第1実施形態による一部の演算コアが故障した場合のプリドライバICとの通信を説明するタイムチャートである。
第1実施形態による系統間接続線を説明する説明図である。
第1実施形態による電源リレーおよび逆接保護リレーの駆動を説明するブロック図である。
第1実施形態によるマイコン内の冗長構成を説明するブロック図である。
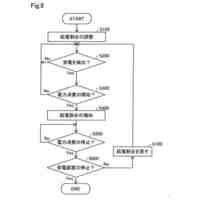
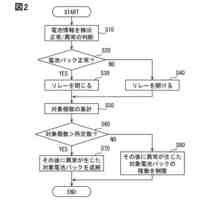
第1実施形態によるクロック監視処理を説明するフローチャートである。
第1実施形態による電源監視処理を説明するフローチャートである。
第2実施形態による電源リレーおよび逆接保護リレーの駆動を説明するブロック図である。
第3実施形態による電源リレーおよび逆接保護リレーの駆動を説明するブロック図である。
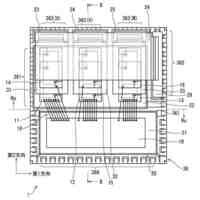
第1実施形態によるECUを説明するブロック図である。
第4実施形態によるECUを説明するブロック図である。
第5実施形態によるECUを説明するブロック図である。
第6実施形態によるECUを説明するブロック図である。
モータ巻線を3系統とする場合の配置を示す模式図である。
第7実施形態によるECUを説明するブロック図である。
第8実施形態によるECUを説明するブロック図である。
第9実施形態によるECUを説明するブロック図である。
第9実施形態による演算タイミングを説明するブロック図である。
第10実施形態によるECUを説明するブロック図である。
第10実施形態によるモータリレーの作動を説明するタイムチャートである。
第11実施形態による基板配置を説明する模式図である。
第11実施形態による基板配置を説明する模式図である。
第12実施形態による基板配置を説明する模式図である。
第12実施形態によるECUを説明するブロック図である。
第13実施形態によるECUを説明するブロック図である。
第13実施形態によるモータリレーの作動を説明するタイムチャートである。
第13実施形態によるモータリレーの作動を説明するタイムチャートである。
第14実施形態による基板配置を説明する模式図である。
第15実施形態による基板配置を説明する模式図である。
第16実施形態によるドライバ部品を示す平面図である。
図50のLI-LI線断面図である。
図50のLII-LII線断面図である。
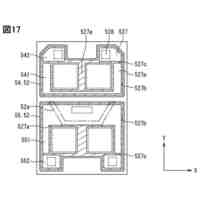
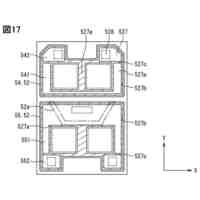
第17実施形態によるドライバ部品を示す平面図である。
図53のLIV-LIV線断面図である。
図53のLV-LV線断面図である。
第18実施形態によるドライバ部品を示す平面図である。
【発明を実施するための形態】
【0009】
以下、本発明によるモータ制御装置を図面に基づいて説明する。以下、複数の実施形態において、実質的に同一の構成には同一の符号を付して説明を省略する。
【0010】
(第1実施形態)
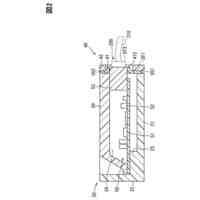
第1実施形態を図1~図28に示す。図1に示すように、駆動装置10は、モータ11と、通信装置としてのECU15と、を備え、例えば車両のステアリング操作を補助するための操舵装置である電動パワーステアリング装置5に適用される。図1は、電動パワーステアリング装置5を備えるステアリングシステム90の全体構成を示すものである。ステアリングシステム90は、操舵部材であるステアリングホイール91、ステアリングシャフト92、ピニオンギア96、ラック軸97、車輪98、および、電動パワーステアリング装置5等を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
携帯機
4日前
株式会社デンソーエレクトロニクス
発音器
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
通信装置
1か月前
株式会社デンソー
圧電素子
6日前
株式会社デンソー
冷却装置
1か月前
株式会社デンソー
駆動装置
7日前
株式会社デンソー
受電装置
1か月前
株式会社デンソー
撮像装置
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
駆動装置
7日前
株式会社デンソー
制御装置
1か月前
株式会社デンソー
電子機器
4日前
株式会社デンソー
熱交換器
1か月前
株式会社デンソー
ステータ
1か月前
株式会社デンソー
検出装置
1か月前
株式会社デンソー
電子装置
8日前
株式会社デンソー
電源装置
21日前
株式会社デンソー
光学部材
11日前
株式会社デンソー
通信装置
11日前
株式会社デンソー
受電装置
1か月前
株式会社デンソー
受電装置
18日前
株式会社デンソー
駆動装置
18日前
株式会社デンソー
受電装置
1か月前
株式会社デンソーウェーブ
決済端末
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
半導体装置
18日前
株式会社デンソー
レーダ装置
1か月前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
半導体装置
今日
株式会社デンソー
半導体装置
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ