TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025095944
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023212346
出願日
2023-12-15
発明の名称
電池加圧機構の制御方法および制御装置並びに車両
出願人
日産自動車株式会社
代理人
個人
,
個人
,
個人
主分類
H01M
10/48 20060101AFI20250619BHJP(基本的電気素子)
要約
【課題】車両側からの要求出力が大きい場合であっても、加圧機構のサイズを大型化させずに、電池に適正圧を印加できる電池加圧機構の制御方法および制御装置を提供する。
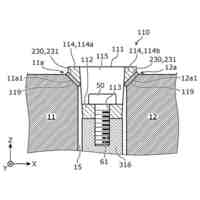
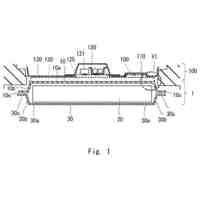
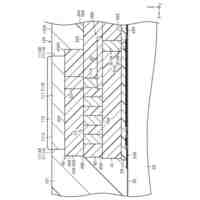
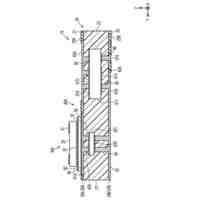
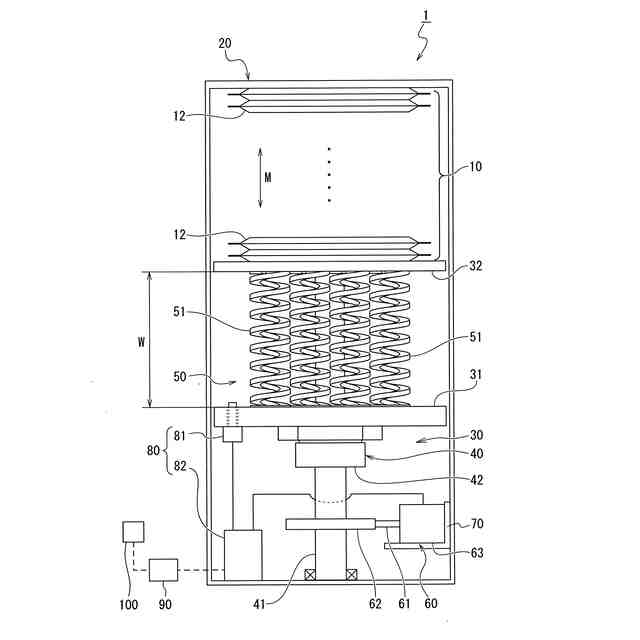
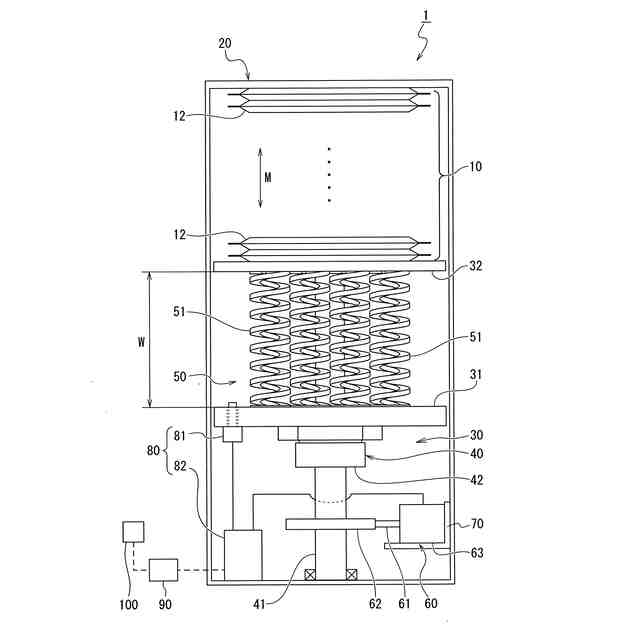
【解決手段】加圧機構30は、電池モジュール10に対して伸縮方向Mに対向配置される一対の加圧板31,32と、一対の加圧板31,32同士の間に介装されて電池モジュール10に加圧力を付与する弾圧部材50と、一対の加圧板31,32相互の対向距離を拡縮可能な直動機構40と、直動機構40を駆動する駆動機構60と、を備える。制御装置80は、一対の加圧板31,32相互の対向距離を測定する測定部81と、駆動機構60を制御する制御部82と、を備え、制御部82は、対向距離の情報と弾圧部材50のたわみ量のたわみ余裕代の情報との関係に基づいて駆動機構60を制御する。
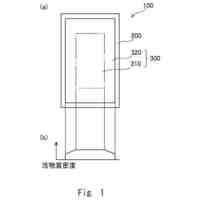
【選択図】図1
特許請求の範囲
【請求項1】
全固体電池をその伸縮方向に加圧する加圧機構を制御する方法であって、
前記加圧機構は、
前記全固体電池に対して前記伸縮方向に対向配置される一対の加圧板と、
前記一対の加圧板同士の間に介装されて前記全固体電池に加圧力を付与する弾圧部材と、
前記一対の加圧板相互の対向距離を拡縮可能な直動機構と、
前記直動機構を駆動する駆動機構と、を備えるものであり、
前記加圧機構の制御に際し、前記一対の加圧板相互の対向距離を測定し、その測定された対向距離と前記弾圧部材のたわみ量のたわみ余裕代との関係に基づいて、前記駆動機構を制御する、ことを特徴とする電池加圧機構の制御方法。
続きを表示(約 1,600 文字)
【請求項2】
全固体電池をその伸縮方向に加圧する加圧機構に用いられる制御装置であって、
前記加圧機構は、
前記全固体電池に対して前記伸縮方向に対向配置される一対の加圧板と、
前記一対の加圧板同士の間に介装されて前記全固体電池に加圧力を付与する弾圧部材と、
前記一対の加圧板相互の対向距離を拡縮可能な直動機構と、
前記直動機構を駆動する駆動機構と、を備えるものであり、
前記制御装置は、
前記対向距離を測定する測定部と、
前記駆動機構を制御する制御部と、を備え、
前記制御部は、前記対向距離の情報と前記弾圧部材のたわみ量のたわみ余裕代の情報との関係に基づいて、前記駆動機構を制御する、ことを特徴とする電池加圧機構用制御装置。
【請求項3】
前記制御部は、
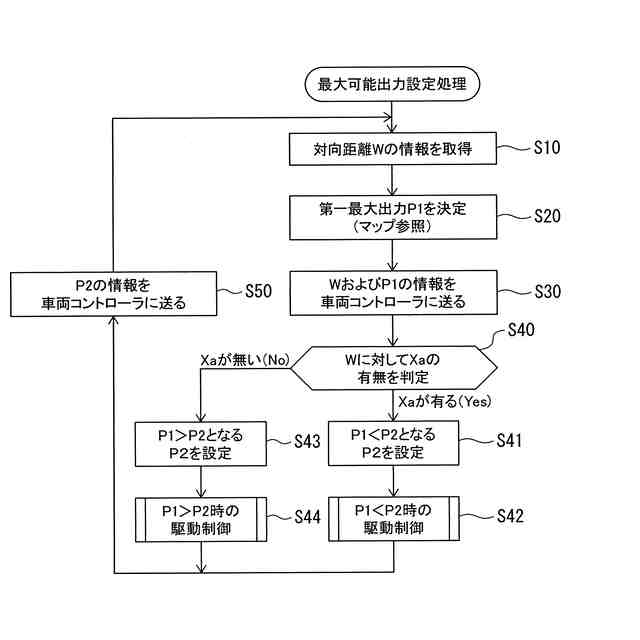
前記測定部により測定された前記対向距離の情報に基づいて、出力要求に応じた出力持続可能電力に対して放電可能な最大出力として第一最大出力を決定するとともに、
前記対向距離の現在の情報と前記たわみ余裕代の情報とに基づいて、
前記たわみ余裕代に余裕が有ると判断したときは、前記第一最大出力よりも高い第二最大出力に放電可能な最高出力を設定し、
前記たわみ余裕代に余裕が無いと判断したときは、前記第一最大出力よりも低い第二最大出力に放電可能な最高出力を設定する、
請求項2に記載の電池加圧機構用制御装置。
【請求項4】
前記制御部は、予めマップ化されたテーブルを参照し、前記弾圧部材のたわみ余裕代Xa(mm)毎に、以下の(式1)によって前記第二最大出力を決定する、請求項3に記載の電池加圧機構用制御装置。
Xa=t×(a-b)・・・・・(式1)
但し、a:前記全固体電池を構成する電池セルの厚みの変化速度(mm/s)
b:前記駆動機構が追従可能な最大速度(mm/s)
t:前記最大出力を出力可能な継続時間(s)
【請求項5】
前記制御部は、前記弾圧部材のたわみ余裕代Xaが、前記弾圧部材の現在のたわみ量Xに対して余裕を有するときは、前記第一最大出力よりも大きな第二最大出力に前記最大出力を更新する請求項4に記載の電池加圧機構用制御装置。
【請求項6】
前記制御部は、前記弾圧部材のたわみ余裕代Xaが、前記弾圧部材の現在のたわみ量Xに対して余裕が無いときは、前記第一最大出力よりも小さな第二最大出力に前記最大出力を更新する請求項4に記載の電池加圧機構用制御装置。
【請求項7】
前記全固体電池は、車両に搭載されるものであり、
前記車両は、車両全体を制御する車両コントローラを有し、
前記制御部は、前記車両コントローラに前記第二最大出力の情報をフィードバックする、請求項3に記載の電池加圧機構用制御装置。
【請求項8】
前記駆動機構が追従可能な最大応答速度は、少なくとも前記車両コントローラ側からの急速充電要求を満足できる追従速度を有し、且つ、前記車両コントローラ側からの最大出力要求以下の追従速度を有する請求項7に記載の電池加圧機構用制御装置。
【請求項9】
前記車両は、車両の運転者が視認可能なメータを有するものであり、
前記メータは、前記車両コントローラの要求に応じて、前記第二最大出力の値及びその持続可能時間、または、前記第二最大出力の値を表示可能に構成されている請求項7に記載の電池加圧機構用制御装置。
【請求項10】
全固体電池を搭載する車両であって、
前記全固体電池をその伸縮方向に加圧する加圧機構と、該加圧機構を制御する制御装置と、を備え、
前記制御装置として、請求項2~9のいずれか一項に記載の電池加圧機構用制御装置を有することを特徴とする車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、リチウム析出型の全固体電池を能動的に加圧する電池加圧機構の制御技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
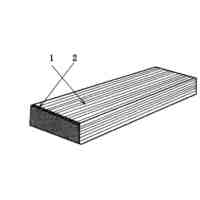
この種の全固体電池は、充放電に応じて電池セルの厚みが変化する。そのため、安定した電池性能を発揮させるために、全固体電池を能動的に加圧する電池加圧機構が必要である。
ここで、特許文献1では、電池セルの状態に応じて電池加圧機構を調整することで、電池セルに適正圧を印加するための基本的な構造、及び、高エネルギ密度を実現する機構の小型化について説明している。
【先行技術文献】
【特許文献】
【0003】
特開2021-190161号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、この種の全固体電池を車両に搭載する場合、車両側からの要求出力が大きければ、それに伴う電池セルの厚みの変化速度も増加する。そのため、電池加圧機構の動作速度をより上げる必要があり、電池加圧機構が大型化するという問題がある。
【0005】
そこで、本発明は、全固体電池を車両に搭載する場合、車両側からの要求出力が大きいときであっても、電池加圧機構のサイズを可及的に大型化させずに、全固体電池に適正圧を印加できる電池加圧機構の制御方法および制御装置並びに車両を提供することを課題とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の一態様に係る電池加圧機構の制御方法は、全固体電池をその伸縮方向に加圧する加圧機構を制御する方法であって、前記加圧機構は、前記全固体電池に対して前記伸縮方向に対向配置される一対の加圧板と、前記一対の加圧板同士の間に介装されて前記全固体電池に加圧力を付与する弾圧部材と、前記一対の加圧板相互の対向距離を拡縮可能な直動機構と、前記直動機構を駆動する駆動機構と、を備えるものであり、前記加圧機構の制御に際し、前記一対の加圧板相互の対向距離を測定し、その測定された対向距離と前記弾圧部材のたわみ量のたわみ余裕代との関係に基づいて、前記駆動機構を制御する。
【0007】
また、上記課題を解決するために、本発明の一態様に係る電池加圧機構用制御装置は、全固体電池をその伸縮方向に加圧する加圧機構に用いられる制御装置であって、前記加圧機構は、前記全固体電池に対して前記伸縮方向に対向配置される一対の加圧板と、前記一対の加圧板同士の間に介装されて前記全固体電池に加圧力を付与する弾圧部材と、前記一対の加圧板相互の対向距離を拡縮可能な直動機構と、前記直動機構を駆動する駆動機構と、を備えるものであり、前記制御装置は、前記対向距離を測定する測定部と、前記駆動機構を制御する制御部と、を備え、前記制御部は、前記対向距離の情報と前記弾圧部材のたわみ量のたわみ余裕代の情報との関係に基づいて、前記駆動機構を制御する。
【0008】
また、上記課題を解決するために、本発明の一態様に係る車両は、全固体電池を搭載する車両であって、前記全固体電池をその伸縮方向に加圧する加圧機構と、該加圧機構を制御する制御装置と、を備え、前記制御装置として、本発明の一態様に係る電池加圧機構用制御装置を有する。
【発明の効果】
【0009】
本発明によれば、要求出力が大きい場合であっても、電池加圧機構のサイズを可及的に大型化させずに、全固体電池に適正圧を印加できる。
【図面の簡単な説明】
【0010】
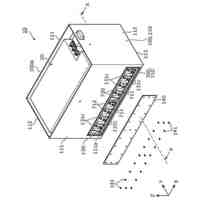
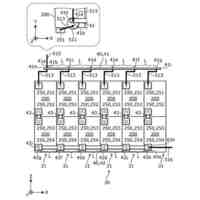
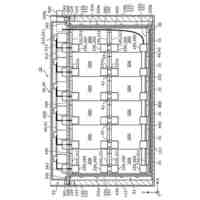
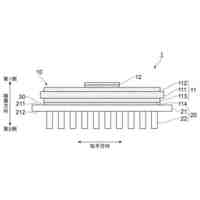
本発明の一態様に係る加圧機構を備える電池パックの第一実施形態の模式的説明図である。
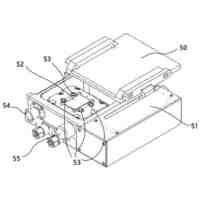
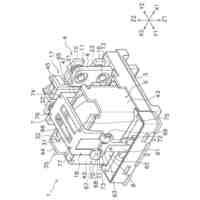
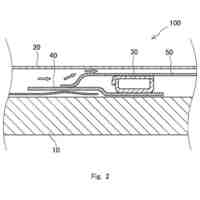
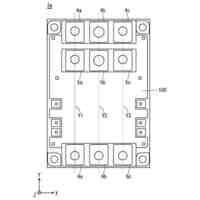
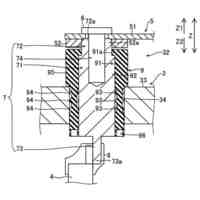
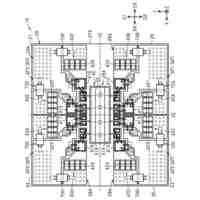
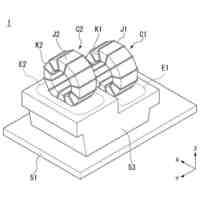
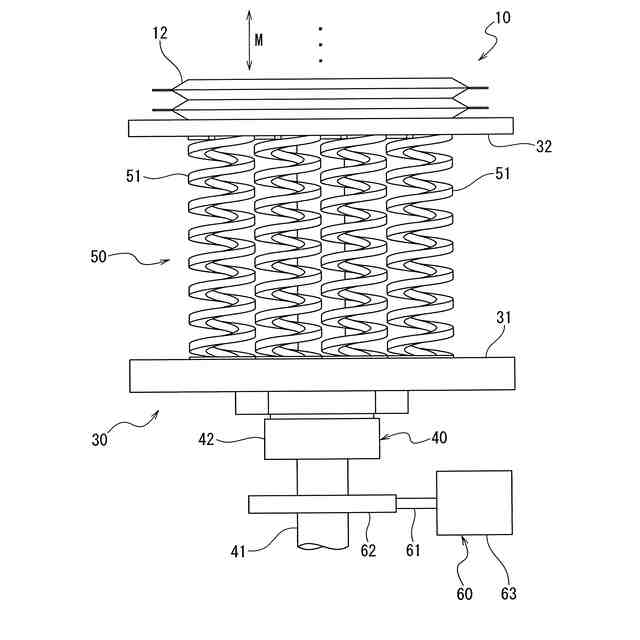
図1の加圧機構を示す説明図である。
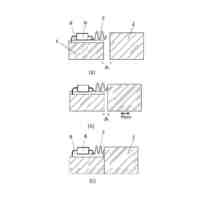
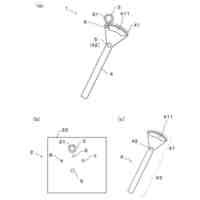
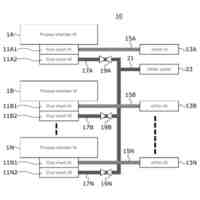
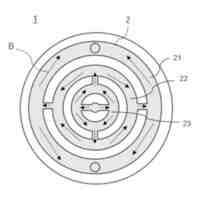
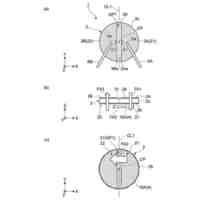
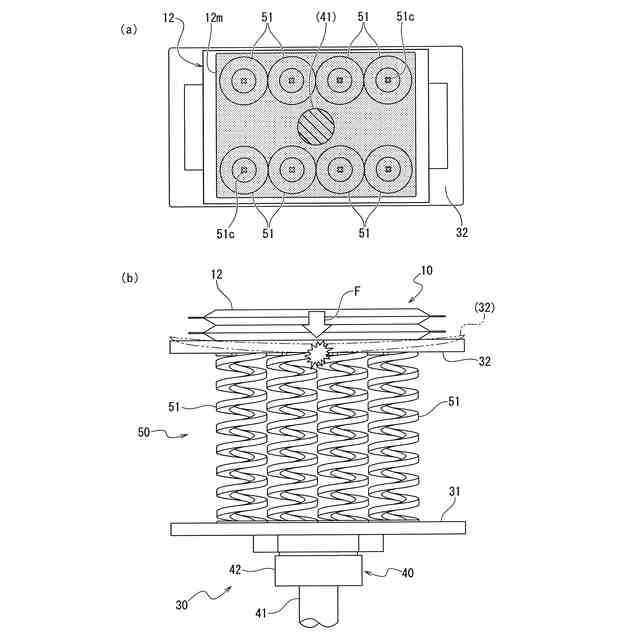
図1の加圧機構が備える弾圧部材の説明図であり、同図(a)は図2の模式的平面図、(b)は弾圧部材による面圧分布均一機能のイメージを示す図である。
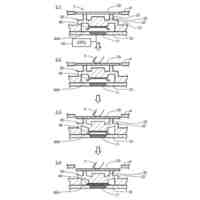
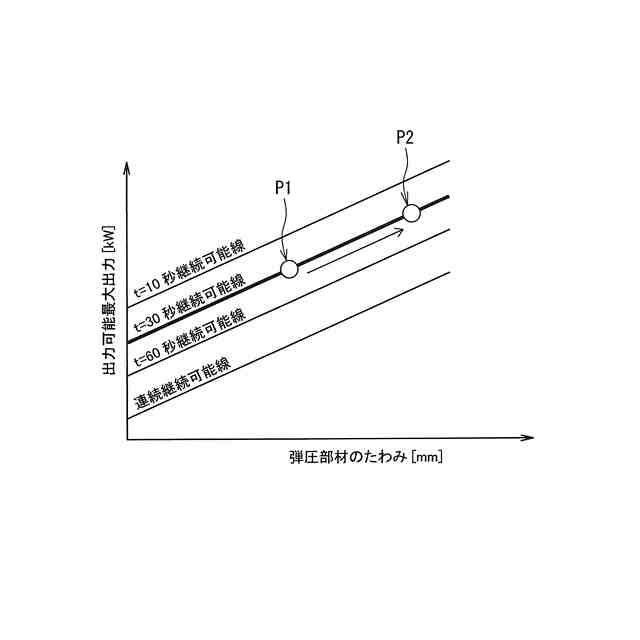
図1の加圧機構により電池モジュール(全固体電池)に対する面圧が所望の範囲に制御されるイメージを示すグラフである。
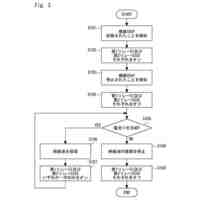
図1の加圧機構を制御する制御装置の制御部が実行する最大可能出力設定処理のフローチャートである。
制御部が実行する最大可能出力設定処理で参照されるマップ化されたテーブルの一例を示す図である。
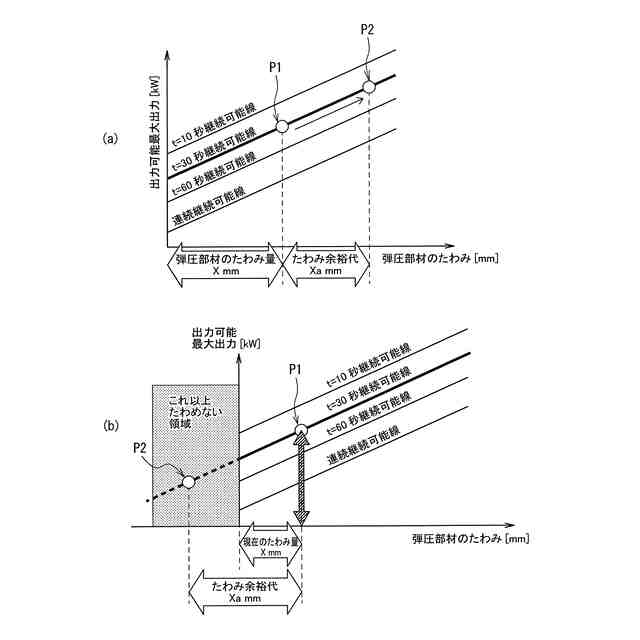
制御部が実行する最大可能出力設定処理で参照されるマップ化されたテーブルの一例を示す図であり、同図(a)は、たわみ余裕代に余裕がある例を示し、(b)は、たわみ余裕代に余裕がない例を示している。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ExH
電流開閉装置
今日
個人
鉄心用材料とその製造方法
5日前
株式会社クオルテック
空気電池
12日前
エイブリック株式会社
半導体装置
今日
株式会社メルビル
ステージ
7日前
株式会社GSユアサ
蓄電装置
5日前
株式会社GSユアサ
蓄電装置
5日前
株式会社GSユアサ
蓄電装置
今日
株式会社GSユアサ
蓄電装置
5日前
株式会社GSユアサ
蓄電装置
5日前
株式会社GSユアサ
蓄電装置
5日前
オムロン株式会社
電磁継電器
1日前
トヨタ自動車株式会社
電源装置
今日
中国電力株式会社
断路器操作構造
1日前
住友電装株式会社
コネクタ
5日前
トヨタ自動車株式会社
電池パック
今日
ローム株式会社
チップ部品
今日
トヨタ自動車株式会社
電池パック
今日
住友電装株式会社
コネクタ
5日前
エドワーズ株式会社
冷却システム
5日前
東洋電装株式会社
操作装置
1日前
富士電機株式会社
半導体モジュール
今日
トヨタ自動車株式会社
電極及び電池
13日前
株式会社村田製作所
二次電池
5日前
三菱電機株式会社
半導体装置
13日前
株式会社アイシン
回転電機駆動装置
6日前
トヨタバッテリー株式会社
電池パック
7日前
ローム株式会社
半導体発光装置
5日前
三菱電機株式会社
ミラー
1日前
株式会社レゾナック
半導体装置
1日前
ローム株式会社
半導体発光装置
5日前
TDK株式会社
電源装置
5日前
TDK株式会社
コンデンサ
今日
ローム株式会社
チップインダクタ
今日
新光電気工業株式会社
半導体装置
今日
富士電機株式会社
半導体装置の製造方法
13日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ