TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025089022
公報種別
公開特許公報(A)
公開日
2025-06-12
出願番号
2023203945
出願日
2023-12-01
発明の名称
製造装置
出願人
花王株式会社
代理人
弁理士法人翔和国際特許事務所
主分類
B65G
54/02 20060101AFI20250605BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】搬送面上に設定され且つ作業装置が作業を行う現実の作業領域に、搬送体を精度よく移動できる、製造装置を提供すること。
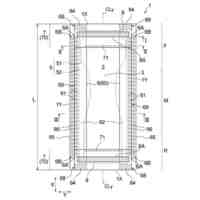
【解決手段】本発明は、搬送面25と、該搬送面25上を自由移動する複数の搬送体tと、該搬送体tの移動を制御する搬送制御部と、作業装置Wとを備えた製造装置100に関する。製造装置100は、搬送面25に対する作業装置Wの相対位置を検出する相対位置検出部を備えている。作業装置Wは、該作業装置Wが作業を行う作業領域WAを有し、且つ搬送面25に対して移動可能になされている。搬送制御部は、検出した相対位置に基づき決定される、搬送面25上の現実の作業領域WAに対して搬送体tを移動させる。
【選択図】図10
特許請求の範囲
【請求項1】
搬送面と、該搬送面上を自由移動する複数の搬送体と、該搬送体の移動を制御する搬送制御部と、作業装置とを備えた製造装置であって、
前記搬送面に対する前記作業装置の相対位置を検出する相対位置検出部を備えており、
前記作業装置は、該作業装置が作業を行う作業領域を有し、且つ前記搬送面に対して移動可能になされており、
前記搬送制御部は、検出した前記相対位置に基づき決定される、前記搬送面上の現実の前記作業領域に対して前記搬送体を移動させる、製造装置。
続きを表示(約 790 文字)
【請求項2】
前記製造装置は、前記搬送面を構成する搬送ステージを備え、
前記作業装置は、少なくとも一時的に前記搬送面上に配置される磁気性部材を備え、
前記搬送体は、磁石を有し、
前記搬送ステージは、磁力を発生させて、前記搬送体が備える前記磁石との相互作用により、前記搬送体を該搬送ステージから浮上させ且つ該搬送ステージ上を移動させる磁力発生部を有しており、
前記相対位置検出部は、前記搬送面上の前記磁気性部材によって、前記相対位置を検出する、請求項1に記載の製造装置。
【請求項3】
前記作業装置又は該作業装置を運搬する運搬装置が、2個以上の前記磁気性部材を具備している、請求項2に記載の製造装置。
【請求項4】
前記磁気性部材は、固有の磁石配列を有し、該磁石配列によって識別可能になされている、請求項2又は3に記載の製造装置。
【請求項5】
前記作業装置は、前記搬送面に対し前記磁気性部材を進退させる駆動部を具備している、請求項2~4の何れか1項に記載の製造装置。
【請求項6】
前記搬送面上に基準目印部を配置し、
前記相対位置検出部は、前記搬送面上における特定の位置を示す前記基準目印部を基準として用い、前記相対位置を検出する、請求項1に記載の製造装置。
【請求項7】
前記搬送面は、複数のセグメントからなる搬送ステージにより構成されており、
前記基準目印部が、外観に特徴を有する前記搬送体又は前記セグメントであり、
前記相対位置検出部は、
前記外観を検知するための検出用データを取得する相対位置検出手段を具備しており、
前記検出用データを用いて前記搬送面における前記基準目印部の位置を検出する、請求項6に記載の製造装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、製造装置に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
複数の構成要素からなる物品は、各構成要素どうしを組み合わせることで製造される。このような物品は、製造装置の搬送経路又は作業台に配された構成要素に他の構成要素を組付けられることで製造される。
【0003】
斯かる製造装置の一例として、特許文献1には、ツールを具備した多関節ロボットを具備し、構成要素の位置座標を多関節ロボットのツール位置座標系に変換して、該構成要素の姿勢に対応した方向から移動したツールにより、該構成要素に作業を行う、製造装置が開示されている。斯かる製造装置は、構成要素の位置座標及びツール位置座標は、視覚センサによって検出され、視覚センサの検出範囲内に設定される任意の基準位置と、該基準位置から所定方向に回転した回転位置との誤差量を補正データとして記録する。
また特許文献2には、走行台車とこれに積載された作業ロボットとを具備する走行ロボットと、該走行ロボットを作業場所に移動させて作業を行わせる作業システムが開示されている。この走行ロボットは、カメラを有し、該カメラによって得られた画像中の作業場所識別表示に基づき、作業場所に対する走行ロボットの位置決めを行うことが開示されている。
また特許文献3には、ハンド部を備えたロボットとこれを搭載した移動装置とを有するロボット搭載移動装置であって、ロボット搭載移動装置の位置である第1装置位置及びこれと異なる第2装置位置において、識別画像中の識別図形の位置である第2識別位置に基づいて、第2識別位置が第2装置位置から所定の範囲内にある場合には、ハンド部の位置を調整し、第2識別位置が第2装置位置から所定の範囲外にある場合には、移動装置を移動させて位置を調整する、ロボット搭載移動装置が開示されている。
また特許文献4には、搬送物を搬送する投入用コンベヤを有する投入ステーションと、投入ステーションの端部に面した積載場所で投入ステーションの端部から搬送物を積載部に積載して搬送する無人搬送車とを備え、無人搬送車の位置に応じて、無人搬送車の動きを選択する搬送システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第4289619号公報
特許第6249292号公報
特開2022-126768号公報
特開2022-133221号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
複数の構成要素からなる物品を製造する製造装置として、構成要素を搬送する搬送装置の搬送経路に沿って、該構成要素に対し作業を行う作業装置が配置されたものがある。この作業装置が行う作業は、例えば、洗浄や充填、キャップ締め等であり、物品を製造する過程で当該作業が行われる。このような製造装置に関し、前述した走行台車や移動装置のように、搬送経路が設定される搬送面に対して作業装置が移動可能であると、搬送面に事前に設定される作業予定位置と、作業装置の現実の作業位置とにずれが発生することがある。これにより、構成要素に対する作業精度が低下する虞がある。
【0006】
本発明は、搬送面上に設定され且つ作業装置が作業を行う現実の作業領域に、搬送体を精度よく移動できる、製造装置を提供することに関する。
【課題を解決するための手段】
【0007】
本発明は、搬送面と、該搬送面上を自由移動する複数の搬送体と、該搬送体の移動を制御する搬送制御部と、作業装置とを備えた製造装置に関する。
一実施形態において、前記製造装置は、前記搬送面に対する前記作業装置の相対位置を検出する相対位置検出部を備えていることが好ましい。
一実施形態において、前記作業装置は、該作業装置が作業を行う作業領域を有し、且つ前記搬送面に対して移動可能になされていることが好ましい。
一実施形態において、前記搬送制御部は、検出した前記相対位置に基づき決定される、前記搬送面上の現実の前記作業領域に対して前記搬送体を移動させることが好ましい。
【発明の効果】
【0008】
本発明によれば、搬送面上に設定され且つ作業装置が作業を行う現実の作業領域に、搬送体を精度よく搬送できる。
【図面の簡単な説明】
【0009】
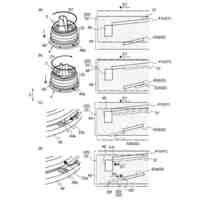
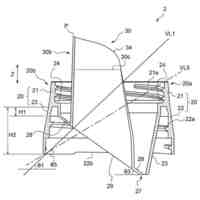
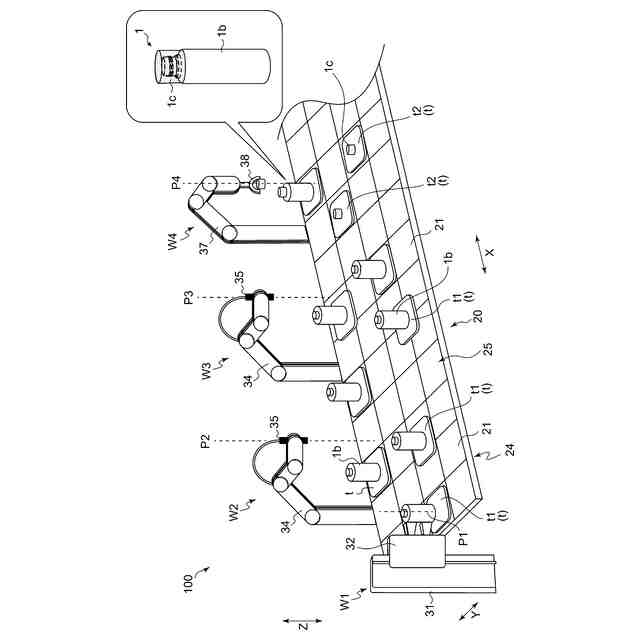
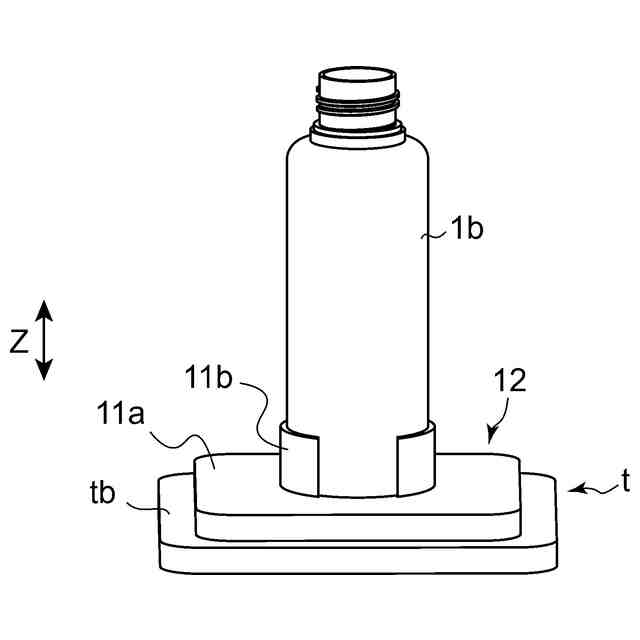
図1は、本発明の一実施形態に係る製造装置の一部と、該製造装置によって製造される物品の一例を示す斜視図である。
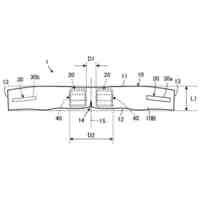
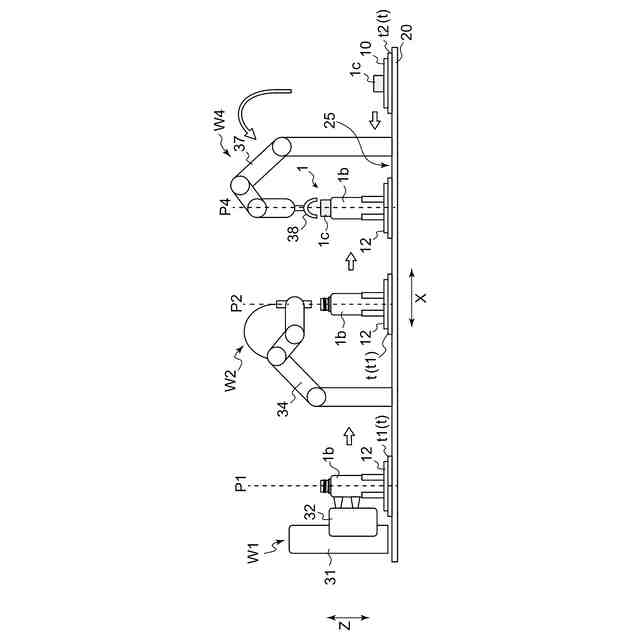
図2は、図1に示す製造装置をY方向から視た側面図である。
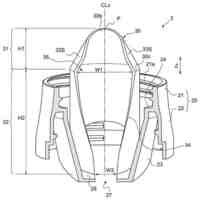
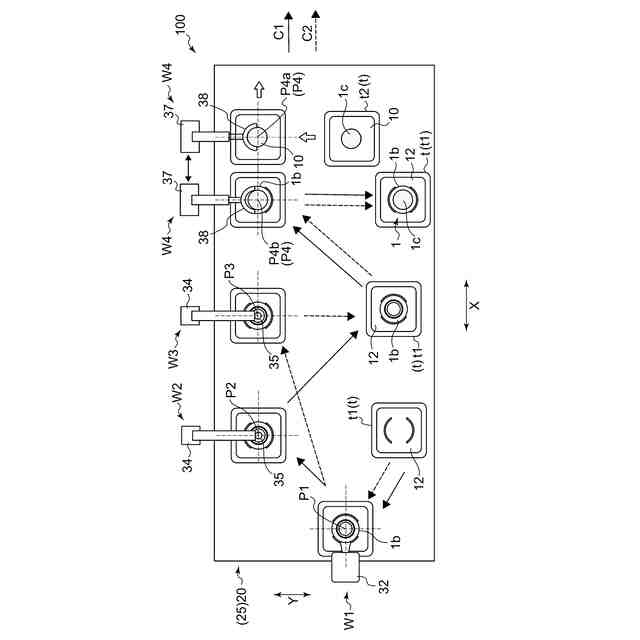
図3は、図1に示す製造装置の平面図である。
図4は、図1の搬送体を示す斜視図である。
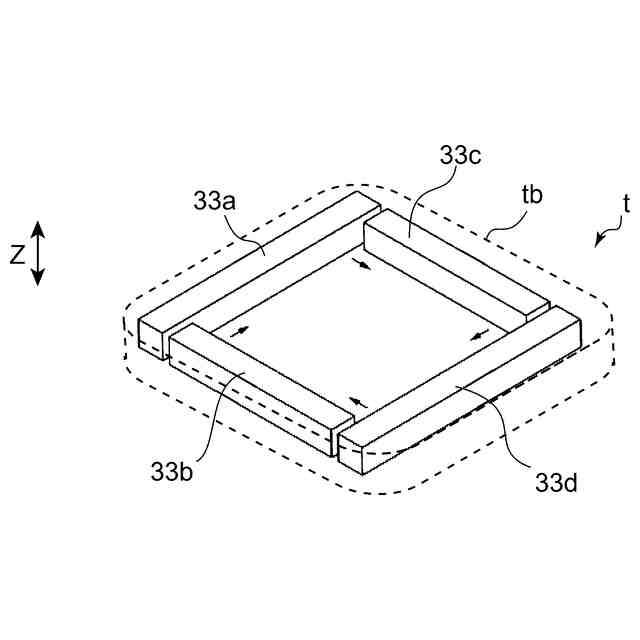
図5は、図1に示す搬送体の内部を透視した斜視図である。
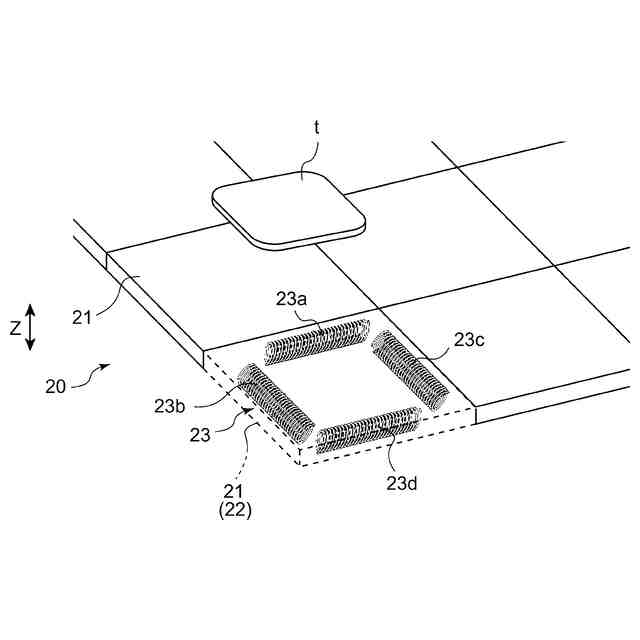
図6は、図1の搬送ステージを示す図であって、一部の区画を透視した状態で示す斜視図である。
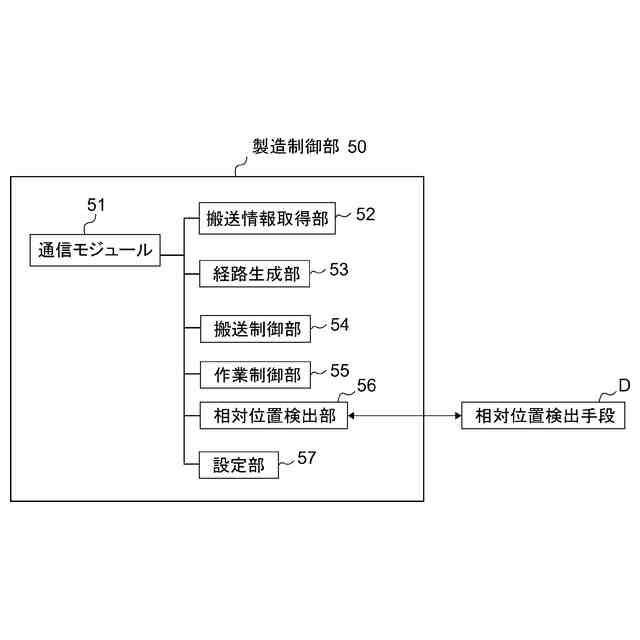
図7は、図1に示す製造装置が具備する製造制御部のブロック図である。
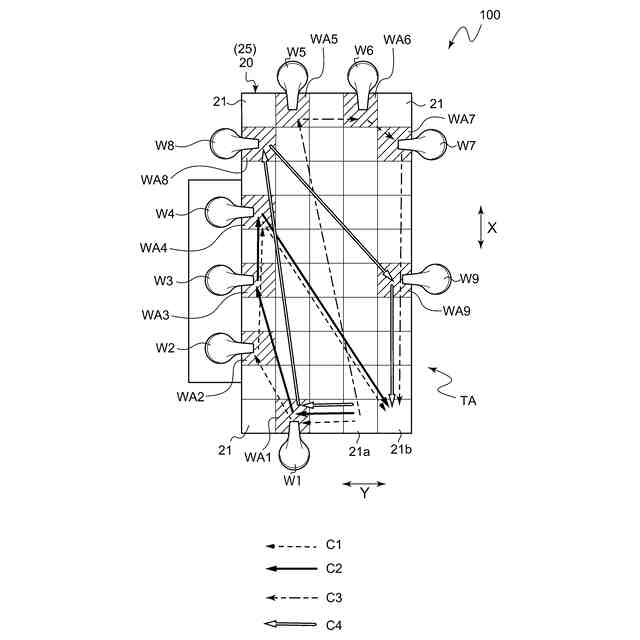
図8は、図1に示す搬送ステージにおける搬送体の移動経路の一例を示す平面図である。
図9は、図1に示す搬送面における搬送領域及び作業領域を模式的に示す斜視図である。
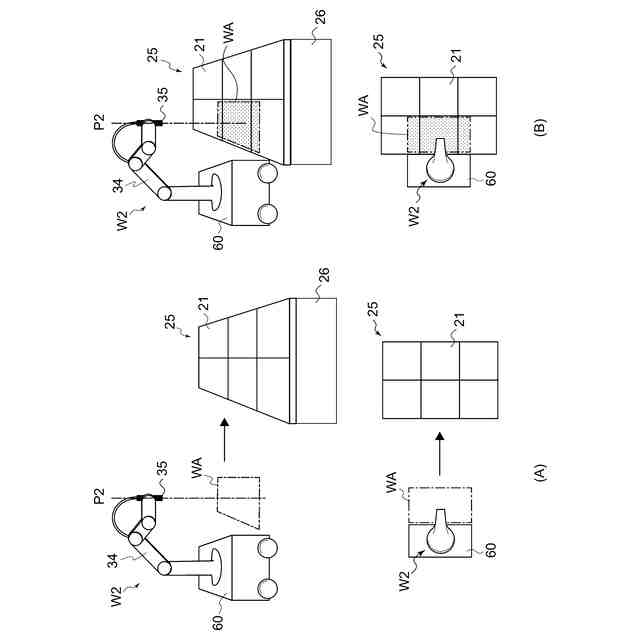
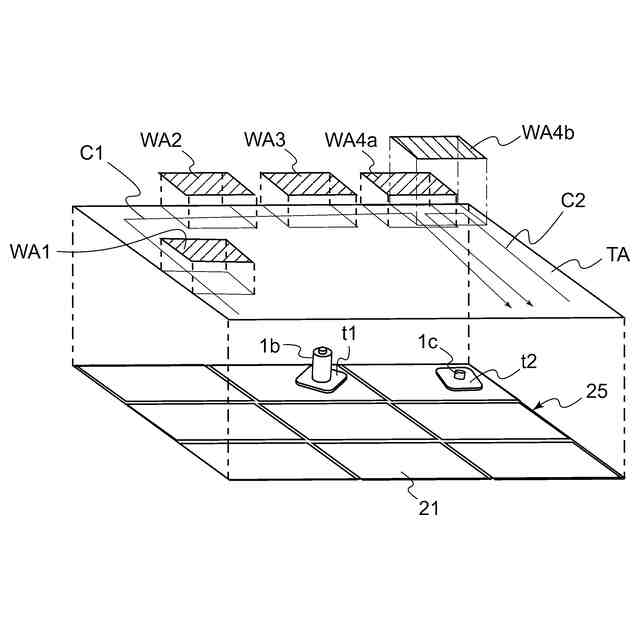
図10(A)及び(B)は、図1に示す作業装置が有する作業領域、及びこれに対応する実作業領域を説明するための斜視図である。
図11(A)及び(B)は、搬送面上に予定作業領域が設定される場合の図10相当図である。
図12(A)は、相対位置検出手段の一実施形態を示す側面図であり、図12(B)は、該相対位置検出手段の平面図である。
図13(A)及び(B)は、相対位置検出手段の別の実施形態を示す側面図である。
図14(A)は、基準目印部として用いられる搬送体の一実施形態を示す斜視図であり、図14(B)は、基準目印部として用いられるセグメントの一実施形態を示す平面図である。
図15は、基準目印部を用いた相対位置の検出方法の一例を示す平面図である。
図16は、実作業領域を設定する方法を示すフロー図である。
図17(A)及び(B)は、位置決め治具による作業装置の位置決め方法を説明するための側面図である。
図18(A)及び(B)は、欠落部による作業装置の位置決め方法を説明するための平面図及び側面図である。
図19(A)及び(B)は、本発明に係る作業装置の別の実施形態を示す平面図である。
【発明を実施するための形態】
【0010】
以下、本発明の製造装置(以下、単に「製造装置」ともいう。)を、その好ましい実施形態に基づき図面を参照しながら説明する。
本実施形態の製造装置100を図1~8に示す。本実施形態の製造装置100は、図1に示すような複数の構成要素を含む物品1を製造するのに適用される。物品1は、複数の構成要素として、物品を構成するパーツ、及び物品内部に収容される内容物等を含んでいる。物品を構成する構成要素は、後述する搬送体tによって搬送される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
花王株式会社
飲料
2か月前
花王株式会社
容器
2か月前
花王株式会社
固形食品
今日
花王株式会社
注出部材
2か月前
花王株式会社
放散装置
7日前
花王株式会社
注出部材
2か月前
花王株式会社
消臭方法
2か月前
花王株式会社
吸収性物品
今日
花王株式会社
カプセル剤
2か月前
花王株式会社
皮膚外用剤
2か月前
花王株式会社
樹脂組成物
2か月前
花王株式会社
吸収性物品
2か月前
花王株式会社
化粧料容器
1か月前
花王株式会社
アイマスク
2か月前
花王株式会社
吸収性物品
20日前
花王株式会社
吸収性物品
20日前
花王株式会社
皮膚化粧料
1か月前
花王株式会社
容器組立体
1か月前
花王株式会社
パウチ容器
23日前
花王株式会社
固形入浴剤
27日前
花王株式会社
吸収性物品
20日前
花王株式会社
吸収性パッド
14日前
花王株式会社
鋳型用組成物
20日前
花王株式会社
シート材容器
1か月前
花王株式会社
エッチング液
1か月前
花王株式会社
パッドカバー
2か月前
花王株式会社
酵素センサー
1か月前
花王株式会社
消臭剤組成物
2か月前
花王株式会社
剥離剤組成物
6日前
花王株式会社
吸収性パッド
7日前
花王株式会社
吸収性パッド
2か月前
花王株式会社
抗菌剤組成物
2か月前
花王株式会社
防錆剤組成物
7日前
花王株式会社
防錆剤組成物
7日前
花王株式会社
抗菌剤組成物
2か月前
花王株式会社
洗浄剤組成物
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ