TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025074308
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2025034404,2023093895
出願日
2025-03-05,2019-03-11
発明の名称
画像符号化装置、画像符号化方法、及びプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
H04N
19/126 20140101AFI20250502BHJP(電気通信技術)
要約
【課題】 一部の直交変換係数を強制的に0とする手法をより効率的に実行することを目的としている。
【解決手段】 直交変換手段は、P×Q画素の長方形のブロックの予測誤差に対して直交変換を実行することによって、N×M個(NはN<Pを満たす整数、かつ、MはM<Qを満たす整数)の直交変換係数を生成する。量子化手段は、N×M個の要素を有する量子化マトリクスを少なくとも用いてN×M個の直交変換係数を量子化して、N×M個の量子化係数を生成する。
【選択図】 図1
特許請求の範囲
【請求項1】
P×Q画素(P及びQは整数)の第1のブロックと、N×M画素(NはN<Pを満たす整数、かつ、MはM<Qを満たす整数)の第2のブロックとを含む複数のブロックを用いてビットストリームから画像を復号することが可能な画像復号装置において、
前記第1のブロックに対応する第1の量子化変換係数群に対応するデータと、前記第2のブロックに対応する第2の量子化変換係数群に対応するデータとを前記ビットストリームから復号する復号手段と、
N×M個の要素を有する第1の量子化マトリクスを用いて前記第1の量子化変換係数群から周波数成分を表す第1の変換係数群を導出し、N×M個の要素を有する第2の量子化マトリクスを用いて前記第2の量子化変換係数群から周波数成分を表す第2の変換係数群を導出する逆量子化手段と、
前記第1の変換係数群に対して逆変換処理を実行することによって前記第1のブロックに対応する第1の予測誤差群を導出し、前記第2の変換係数群に対して逆変換処理を実行することによって前記第2のブロックに対応する第2の予測誤差群を導出する逆変換手段と、
前記第1の予測誤差群と予測画像データとに基づく画像データを少なくとも再生する再生部と
を有し、
前記予測画像データは、イントラ予測とインター予測とを組み合わせた予測方法を用いて導出することが可能であり、
復号対象のブロックが前記第1のブロックである場合、前記逆変換手段は、N×M個の変換係数である前記第1の変換係数群と、M×Qの行列との乗算を行うことで、N×Q個の中間値を導出し、さらに、P×Nの行列と、前記N×Q個の中間値との乗算を行うことで、前記第1の変換係数群からP×Q個の予測誤差である前記第1の予測誤差群を導出し、
前記N×M個の要素を有する前記第1の量子化マトリクスは、R×S(RはR≦Nを満たす整数、かつ、SはS≦Mを満たす整数)個の要素を有する第3の量子化マトリクスにおける一部の要素を含むとともに前記第3の量子化マトリクスにおける他の要素を含まない量子化マトリクスであり、
前記N×M個の要素を有する前記第2の量子化マトリクスは、R×S個の要素を有する第4の量子化マトリクスにおける全ての要素を含む量子化マトリクスであり、
前記第3の量子化マトリクスは前記第4の量子化マトリクスとは異なり、
前記第1の量子化マトリクスは、DC成分に対応する要素以外は、前記第3の量子化マトリクスにおける前記一部の要素で構成される量子化マトリクスであり、
前記第2の量子化マトリクスは、DC成分に対応する要素以外は、前記第4の量子化マトリクスにおける前記全ての要素で構成される量子化マトリクスであり、
前記逆量子化手段は、変換係数群を導出するために、量子化パラメータを更に用いる
ことを特徴とする画像復号装置。
続きを表示(約 4,000 文字)
【請求項2】
P×Q画素(P及びQは整数)の第1のブロックと、N×M画素(NはN<Pを満たす整数、かつ、MはM<Qを満たす整数)の第2のブロックとを含む複数のブロックを用いてビットストリームから画像を復号することが可能な画像復号方法において、
前記第1のブロックに対応する第1の量子化変換係数群に対応するデータと、前記第2のブロックに対応する第2の量子化変換係数群に対応するデータとを前記ビットストリームから復号する復号工程と、
N×M個の要素を有する第1の量子化マトリクスを用いて前記第1の量子化変換係数群から周波数成分を表す第1の変換係数群を導出し、N×M個の要素を有する第2の量子化マトリクスを用いて前記第2の量子化変換係数群から周波数成分を表す第2の変換係数群を導出する逆量子化工程と、
前記第1の変換係数群に対して逆変換処理を実行することによって前記第1のブロックに対応する第1の予測誤差群を導出し、前記第2の変換係数群に対して逆変換処理を実行することによって前記第2のブロックに対応する第2の予測誤差群を導出する逆変換工程と、
前記第1の予測誤差群と予測画像データとに基づく画像データを少なくとも再生する再生工程と
を有し、
前記予測画像データは、イントラ予測とインター予測とを組み合わせた予測方法を用いて導出することが可能であり、
復号対象のブロックが前記第1のブロックである場合、前記逆変換工程において、N×M個の変換係数である前記第1の変換係数群と、M×Qの行列との乗算を行うことで、N×Q個の中間値を導出し、さらに、P×Nの行列と、前記N×Q個の中間値との乗算を行うことで、前記第1の変換係数群からP×Q個の予測誤差である前記第1の予測誤差群を導出し、
前記N×M個の要素を有する前記第1の量子化マトリクスは、R×S(RはR≦Nを満たす整数、かつ、SはS≦Mを満たす整数)個の要素を有する第3の量子化マトリクスにおける一部の要素を含むとともに前記第3の量子化マトリクスにおける他の要素を含まない量子化マトリクスであり、
前記N×M個の要素を有する前記第2の量子化マトリクスは、R×S個の要素を有する第4の量子化マトリクスにおける全ての要素を含む量子化マトリクスであり、
前記第3の量子化マトリクスは前記第4の量子化マトリクスとは異なり、
前記第1の量子化マトリクスは、DC成分に対応する要素以外は、前記第3の量子化マトリクスにおける前記一部の要素で構成される量子化マトリクスであり、
前記第2の量子化マトリクスは、DC成分に対応する要素以外は、前記第4の量子化マトリクスにおける前記全ての要素で構成される量子化マトリクスであり、
前記逆量子化工程において、変換係数群を導出するために、量子化パラメータが更に用いられる
ことを特徴とする画像復号方法。
【請求項3】
前記第1及び第2のブロックは正方形のブロックである
ことを特徴とする請求項2記載の画像復号方法。
【請求項4】
前記P及び前記Qは64であり、前記N及び前記Mは32である
ことを特徴とする請求項2記載の画像復号方法。
【請求項5】
前記P及び前記Qは128であり、前記N及び前記Mは32である
ことを特徴とする請求項2記載の画像復号方法
。
【請求項6】
前記第1の変換係数群はN×M個の変換係数であり、
前記第2の変換係数群はN×M個の変換係数である
ことを特徴とする請求項2記載の画像復号方法。
【請求項7】
前記第1及び第2のブロックは、非正方形のブロックである
ことを特徴とする請求項2記載の画像復号方法。
【請求項8】
前記第1の予測誤差群はP×Q個の予測誤差であり、
前記第2の予測誤差群はN×M個の予測誤差である
ことを特徴とする請求項2記載の画像復号方法。
【請求項9】
P×Q画素(P及びQは整数)の第1のブロックと、N×M画素(NはN<Pを満たす整数、かつ、MはM<Qを満たす整数)の第2のブロックとを含む複数のブロックを用いて画像を符号化することが可能な画像符号化装置において、
前記第1のブロックに対応する第1の予測誤差群に対して変換処理を実行することによって第1の変換係数群を導出し、前記第2のブロックに対応する第2の予測誤差群に対して変換処理を実行することによって第2の変換係数群を導出する変換手段と、
N×M個の要素を有する第1の量子化マトリクスを用いて前記第1の変換係数群を量子化して第1の量子化変換係数群を導出し、N×M個の要素を有する第2の量子化マトリクスを用いて前記第2の変換係数群を量子化して第2の量子化変換係数群を導出する量子化手段と、
前記第1のブロックに対応する前記第1の量子化変換係数群に対応するデータと、前記第2のブロックに対応する前記第2の量子化変換係数群に対応するデータとを符号化する符号化手段と
を有し、
少なくとも前記第1の予測誤差群は、イントラ予測とインター予測とを組み合わせた予測方法を用いて導出することが可能であり、
符号化対象のブロックが前記第1のブロックである場合、前記変換手段は、P×Q個の予測誤差である前記第1の予測誤差群と、Q×Mの行列との乗算を行うことで、P×M個の中間値を導出し、さらに、N×Pの行列と、前記P×M個の中間値との乗算を行うことで、前記第1の予測誤差群からN×M個の変換係数である前記第1の変換係数群を導出し、
前記N×M個の要素を有する前記第1の量子化マトリクスは、R×S(RはR≦Nを満たす整数、かつ、SはS≦Mを満たす整数)個の要素を有する第3の量子化マトリクスにおける一部の要素を含むとともに前記第3の量子化マトリクスにおける他の要素を含まない量子化マトリクスであり、
前記N×M個の要素を有する前記第2の量子化マトリクスは、R×S個の要素を有する第4の量子化マトリクスにおける全ての要素を含む量子化マトリクスであり、
前記第3の量子化マトリクスは前記第4の量子化マトリクスとは異なり、
前記第1の量子化マトリクスは、DC成分に対応する要素以外は、前記第3の量子化マトリクスにおける前記一部の要素で構成される量子化マトリクスであり、
前記第2の量子化マトリクスは、DC成分に対応する要素以外は、前記第4の量子化マトリクスにおける前記全ての要素で構成される量子化マトリクスであり、
前記量子化手段は、量子化変換係数群を導出するために、量子化パラメータを更に用いる
ことを特徴とする画像符号化装置。
【請求項10】
P×Q画素(P及びQは整数)の第1のブロックと、N×M画素(NはN<Pを満たす整数、かつ、MはM<Qを満たす整数)の第2のブロックとを含む複数のブロックを用いて画像を符号化することが可能な画像符号化方法において、
前記第1のブロックに対応する第1の予測誤差群に対して変換処理を実行することによって第1の変換係数群を導出し、前記第2のブロックに対応する第2の予測誤差群に対して変換処理を実行することによって第2の変換係数群を導出する変換工程と、
N×M個の要素を有する第1の量子化マトリクスを用いて前記第1の変換係数群を量子化して第1の量子化変換係数群を導出し、N×M個の要素を有する第2の量子化マトリクスを用いて前記第2の変換係数群を量子化して第2の量子化変換係数群を導出する量子化工程と、
前記第1のブロックに対応する前記第1の量子化変換係数群に対応するデータと、前記第2のブロックに対応する前記第2の量子化変換係数群に対応するデータとを符号化する符号化工程と
を有し、
少なくとも前記第1の予測誤差群は、イントラ予測とインター予測とを組み合わせた予測方法を用いて導出することが可能であり、
符号化対象のブロックが前記第1のブロックである場合、前記変換工程において、P×Q個の予測誤差である前記第1の予測誤差群と、Q×Mの行列との乗算を行うことで、P×M個の中間値を導出し、さらに、N×Pの行列と、前記P×M個の中間値との乗算を行うことで、前記第1の予測誤差群からN×M個の変換係数である前記第1の変換係数群を導出し、
前記N×M個の要素を有する前記第1の量子化マトリクスは、R×S(RはR≦Nを満たす整数、かつ、SはS≦Mを満たす整数)個の要素を有する第3の量子化マトリクスにおける一部の要素を含むとともに前記第3の量子化マトリクスにおける他の要素を含まない量子化マトリクスであり、
前記N×M個の要素を有する前記第2の量子化マトリクスは、R×S個の要素を有する第4の量子化マトリクスにおける全ての要素を含む量子化マトリクスであり、
前記第3の量子化マトリクスは前記第4の量子化マトリクスとは異なり、
前記第1の量子化マトリクスは、DC成分に対応する要素以外は、前記第3の量子化マトリクスにおける前記一部の要素で構成される量子化マトリクスであり、
前記第2の量子化マトリクスは、DC成分に対応する要素以外は、前記第4の量子化マトリクスにおける前記全ての要素で構成される量子化マトリクスであり、
前記量子化工程において、量子化変換係数群を導出するために、量子化パラメータが更に用いられる
ことを特徴とする画像符号化方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は画像符号化技術に関する。
続きを表示(約 3,900 文字)
【背景技術】
【0002】
動画像を圧縮する符号化方式として、HEVC(High Efficiency Video Coding)符号化方式(以下、HEVCと記す)が知られている。HEVCでは符号化効率の向上のため、従来のマクロブロック(16×16画素)より大きなサイズの基本ブロックが採用された。この大きなサイズの基本ブロックはCTU(Coding Tree Unit)と呼ばれ、そのサイズは最大64×64画素である。CTUはさらに予測や変換を行う単位となるサブブロックに分割される。
【0003】
また、HEVCにおいては、直交変換を施した後の係数(以下、直交変換係数と記す)を、周波数成分に応じて重み付けをするために量子化マトリクスが用いられている。量子化マトリクスが用いることで、人間の視覚において劣化が目立ちにくい高周波成分のデータを、低周波成分のデータよりも削減することで、画質を維持しながら圧縮効率を高めることが可能となっている。特開2013-38758(特許文献1)では、このような量子化マトリクスを示す情報を符号化する技術が開示されている。
【0004】
また、近年、HEVCの後継としてさらに高効率な符号化方式の国際標準化を行う活動が開始されている。具体的には、ISO/IECとITU-Tとによって設立されたJVET(Joint Video Experts Team)によって、VVC(Versatile Video Coding)符号化方式(以下、VVC)の標準化が進められている。この標準化において、符号化効率の向上のため、直交変換を行う際のブロックサイズが大きい場合に、高周波成分の直交変換係数を強制的に0とすることで符号量を削減する新たな手法(以下、ゼロアウトと呼称する)が検討されている。
【先行技術文献】
【特許文献】
【0005】
特開2013-38758
【発明の概要】
【発明が解決しようとする課題】
【0006】
そこで、本発明の目的は、一部の直交変換係数を強制的に0とする手法をより効率的に実行することを目的としている。
【課題を解決するための手段】
【0007】
前述の問題点を解決するため、本発明の画像復号装置は以下の構成を有する。すなわち、P×Q画素(P及びQは整数)の第1のブロックと、N×M画素(NはN<Pを満たす整数、かつ、MはM<Qを満たす整数)の第2のブロックとを含む複数のブロックを用いてビットストリームから画像を復号することが可能な画像復号装置において、前記第1のブロックに対応する第1の量子化変換係数群に対応するデータと、前記第2のブロックに対応する第2の量子化変換係数群に対応するデータとを前記ビットストリームから復号する復号手段と、N×M個の要素を有する第1の量子化マトリクスを用いて前記第1の量子化変換係数群から周波数成分を表す第1の変換係数群を導出し、N×M個の要素を有する第2の量子化マトリクスを用いて前記第2の量子化変換係数群から周波数成分を表す第2の変換係数群を導出する逆量子化手段と、前記第1の変換係数群に対して逆変換処理を実行することによって前記第1のブロックに対応する第1の予測誤差群を導出し、前記第2の変換係数群に対して逆変換処理を実行することによって前記第2のブロックに対応する第2の予測誤差群を導出する逆変換手段と、前記第1の予測誤差群と予測画像データとに基づく画像データを少なくとも再生する再生部とを有し、前記予測画像データは、イントラ予測とインター予測とを組み合わせた予測方法を用いて導出することが可能であり、復号対象のブロックが前記第1のブロックである場合、前記逆変換手段は、N×M個の変換係数である前記第1の変換係数群と、M×Qの行列との乗算を行うことで、N×Q個の中間値を導出し、さらに、P×Nの行列と、前記N×Q個の中間値との乗算を行うことで、前記第1の変換係数群からP×Q個の予測誤差である前記第1の予測誤差群を導出し、前記N×M個の要素を有する前記第1の量子化マトリクスは、R×S(RはR≦Nを満たす整数、かつ、SはS≦Mを満たす整数)個の要素を有する第3の量子化マトリクスにおける一部の要素を含むとともに前記第3の量子化マトリクスにおける他の要素を含まない量子化マトリクスであり、前記N×M個の要素を有する前記第2の量子化マトリクスは、R×S個の要素を有する第4の量子化マトリクスにおける全ての要素を含む量子化マトリクスであり、前記第3の量子化マトリクスは前記第4の量子化マトリクスとは異なり、前記第1の量子化マトリクスは、DC成分に対応する要素以外は、前記第3の量子化マトリクスにおける前記一部の要素で構成される量子化マトリクスであり、前記第2の量子化マトリクスは、DC成分に対応する要素以外は、前記第4の量子化マトリクスにおける前記全ての要素で構成される量子化マトリクスであり、前記逆量子化手段は、変換係数群を導出するために、量子化パラメータを更に用いる。
【0008】
前述の問題点を解決するため、本発明の画像符号化装置は以下の構成を有する。すなわち、P×Q画素(P及びQは整数)の第1のブロックと、N×M画素(NはN<Pを満たす整数、かつ、MはM<Qを満たす整数)の第2のブロックとを含む複数のブロックを用いて画像を符号化することが可能な画像符号化装置において、前記第1のブロックに対応する第1の予測誤差群に対して変換処理を実行することによって第1の変換係数群を導出し、前記第2のブロックに対応する第2の予測誤差群に対して変換処理を実行することによって第2の変換係数群を導出する変換手段と、N×M個の要素を有する第1の量子化マトリクスを用いて前記第1の変換係数群を量子化して第1の量子化変換係数群を導出し、N×M個の要素を有する第2の量子化マトリクスを用いて前記第2の変換係数群を量子化して第2の量子化変換係数群を導出する量子化手段と、前記第1のブロックに対応する前記第1の量子化変換係数群に対応するデータと、前記第2のブロックに対応する前記第2の量子化変換係数群に対応するデータとを符号化する符号化手段とを有し、少なくとも前記第1の予測誤差群は、イントラ予測とインター予測とを組み合わせた予測方法を用いて導出することが可能であり、符号化対象のブロックが前記第1のブロックである場合、前記変換手段は、P×Q個の予測誤差である前記第1の予測誤差群と、Q×Mの行列との乗算を行うことで、P×M個の中間値を導出し、さらに、N×Pの行列と、前記P×M個の中間値との乗算を行うことで、前記第1の予測誤差群からN×M個の変換係数である前記第1の変換係数群を導出し、前記N×M個の要素を有する前記第1の量子化マトリクスは、R×S(RはR≦Nを満たす整数、かつ、SはS≦Mを満たす整数)個の要素を有する第3の量子化マトリクスにおける一部の要素を含むとともに前記第3の量子化マトリクスにおける他の要素を含まない量子化マトリクスであり、前記N×M個の要素を有する前記第2の量子化マトリクスは、R×S個の要素を有する第4の量子化マトリクスにおける全ての要素を含む量子化マトリクスであり、前記第3の量子化マトリクスは前記第4の量子化マトリクスとは異なり、前記第1の量子化マトリクスは、DC成分に対応する要素以外は、前記第3の量子化マトリクスにおける前記一部の要素で構成される量子化マトリクスであり、前記第2の量子化マトリクスは、DC成分に対応する要素以外は、前記第4の量子化マトリクスにおける前記全ての要素で構成される量子化マトリクスであり、前記量子化手段は、量子化変換係数群を導出するために、量子化パラメータを更に用いる。
【発明の効果】
【0009】
本発明によれば、一部の直交変換係数を強制的に0とする手法をより効率的に実行することを目的としている。
【図面の簡単な説明】
【0010】
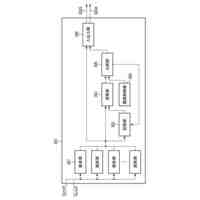
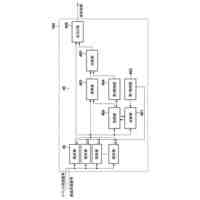
実施形態1における画像符号化装置の構成を示すブロック図である。
実施形態2における画像復号装置の構成を示すブロック図である。
実施形態1に係る画像符号化装置における画像符号化処理を示すフローチャートである。
実施形態2に係る画像復号装置における画像復号処理を示すフローチャートである。
本発明の画像符号化装置や画像復号装置に適用可能なコンピュータのハードウェア構成例を示すブロック図である。
実施形態1で出力されるビットストリームの一例を示す図である。
実施形態1および実施形態2で用いられるサブブロック分割の一例を示す図である。
実施形態1および実施形態2で用いられる量子化マトリクスの一例を示す図である。
実施形態1および実施形態2で用いられる量子化マトリクスの各要素の走査方法を示す図である。
実施形態1および実施形態2で生成される量子化マトリクスの差分値行列を示す図である。
量子化マトリクスの差分値の符号化に用いられる符号化テーブルの一例を示す図である。
実施形態1および実施形態2で用いられる量子化マトリクスの他の例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
現像装置
2日前
キヤノン株式会社
現像装置
2日前
キヤノン株式会社
現像装置
2日前
キヤノン株式会社
通信装置
2日前
キヤノン株式会社
撮像装置
1日前
キヤノン株式会社
清掃装置
1日前
キヤノン株式会社
情報処理装置
3日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
静電捕集装置
1日前
キヤノン株式会社
静電捕集装置
1日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像処理装置
3日前
キヤノン株式会社
液体吐出装置
3日前
キヤノン株式会社
光電変換装置
7日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
放射線撮像装置
3日前
キヤノン株式会社
液体吐出ヘッド
2日前
キヤノン株式会社
液体吐出ヘッド
2日前
キヤノン株式会社
液体吐出ヘッド
1日前
キヤノン株式会社
液体吐出ヘッド
1日前
キヤノン株式会社
画像形成システム
7日前
キヤノン株式会社
画像形成システム
3日前
キヤノン株式会社
光学装置及び撮像装置
1日前
キヤノン株式会社
移動体および撮像装置
3日前
キヤノン株式会社
光電変換装置及び機器
4日前
キヤノン株式会社
光電変換装置、移動体
1日前
キヤノン株式会社
光電変換素子の製造方法
3日前
キヤノン株式会社
成形体及び硬化性組成物
3日前
キヤノン株式会社
光電変換装置および機器
4日前
キヤノン株式会社
光電変換素子の製造方法
3日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ