TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025029338
公報種別
公開特許公報(A)
公開日
2025-03-06
出願番号
2023133893
出願日
2023-08-21
発明の名称
害獣駆除システムおよび害獣駆除プログラム
出願人
株式会社ヤマサ
,
国立大学法人信州大学
代理人
個人
,
個人
,
個人
主分類
A01M
29/06 20110101AFI20250227BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】屋内でも害獣を追い払うことができる害獣駆除システムを提供する。
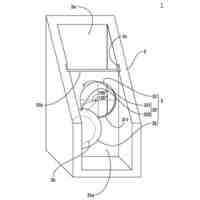
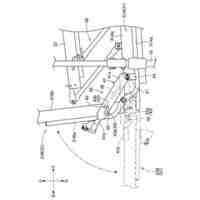
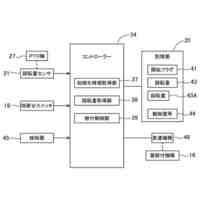
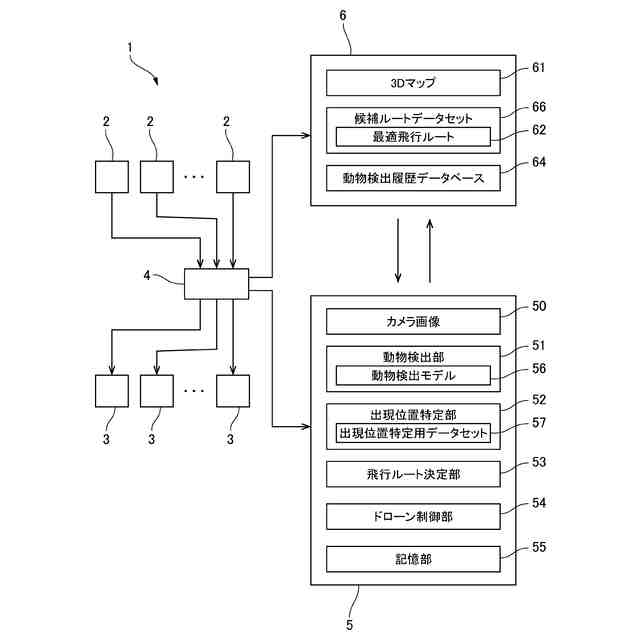
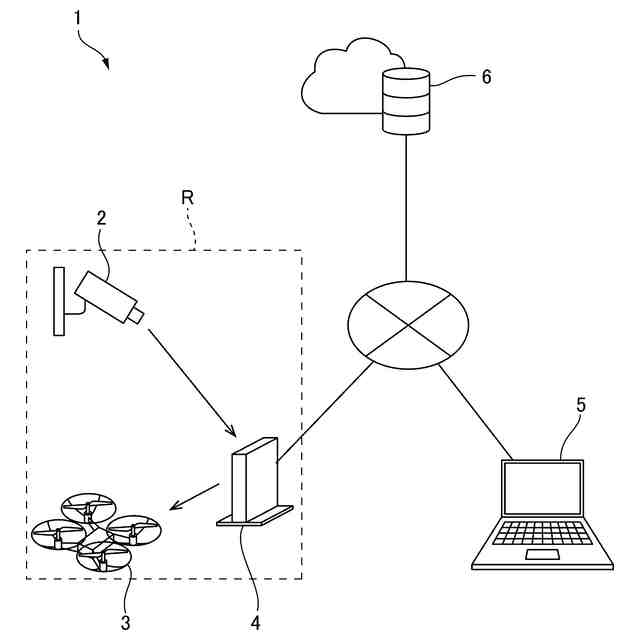
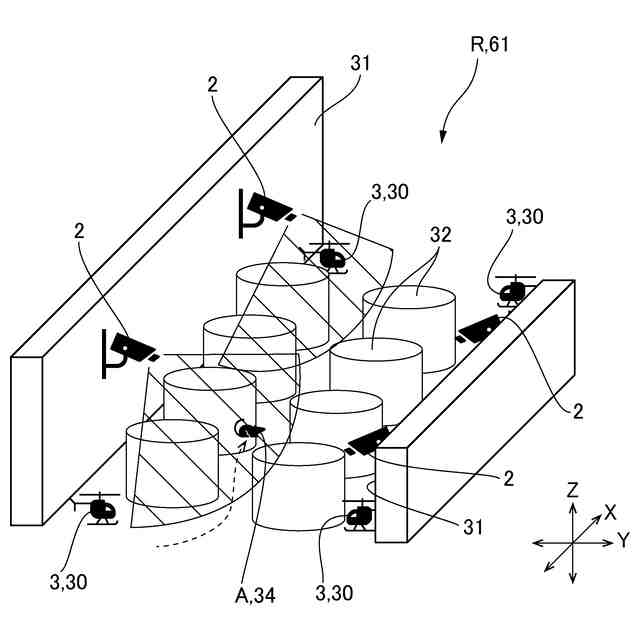
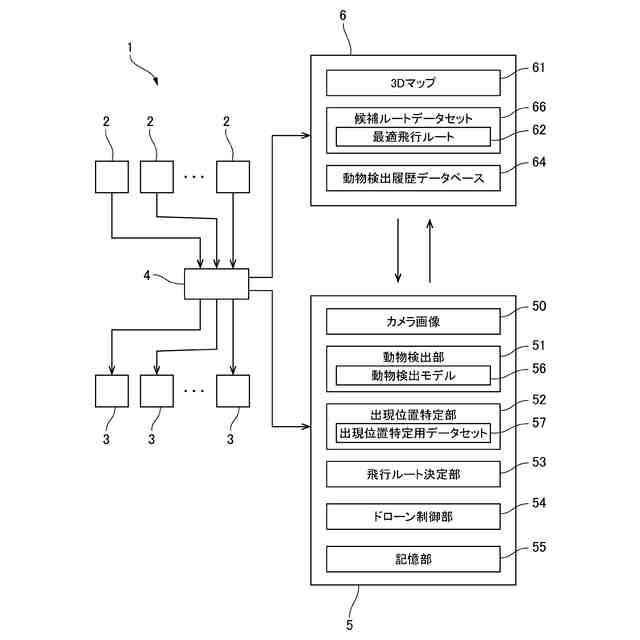
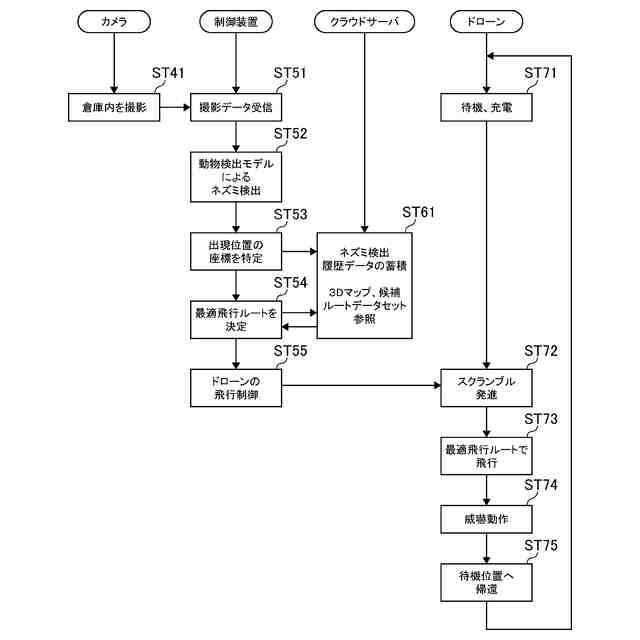
【解決手段】害獣駆除システム1は、倉庫Rを撮影するカメラ2と、倉庫Rを飛行するドローン3と、制御装置5を有する。制御装置5は、機械学習により作成した動物検出モデル56を用いてカメラ2により撮影したカメラ画像50からネズミAを検出する動物検出部51と、動物検出モデル56からの出力データおよび倉庫Rの3Dマップ61を用いて倉庫RにおけるネズミAの出現位置34を特定する出現位置特定部52と、3Dマップ61を用いてドローン3を待機させた待機位置30から出現位置34へ向かう最適飛行ルート62を決定する飛行ルート決定部53と、最適飛行ルート62を飛行する飛行命令、および、ドローン3に予め設定した威嚇動作を行わせる威嚇命令をドローン3に送信するドローン制御部54を備える。
【選択図】図3
特許請求の範囲
【請求項1】
監視対象の空間を撮影するカメラと、
前記監視対象の空間を飛行する無人航空機と、
前記無人航空機および前記カメラと通信可能な制御装置を有し、
前記制御装置は、
機械学習により作成した動物検出モデルを用いて前記カメラにより撮影したカメラ画像から駆除対象の動物を検出する動物検出部と、
前記動物検出モデルからの出力データおよび前記監視対象の空間の3次元データを用いて前記監視対象の空間における前記動物の出現位置を特定する出現位置特定部と、
前記3次元データを用いて前記無人航空機を待機させた待機位置から前記出現位置へ向かう最適飛行ルートを決定する飛行ルート決定部と、
前記最適飛行ルートを飛行する飛行命令、および、前記無人航空機に予め設定した威嚇動作を行わせる威嚇命令を前記無人航空機に送信する無人航空機制御部を備えることを特徴とする害獣駆除システム。
続きを表示(約 1,200 文字)
【請求項2】
前記無人航空機は、前記監視対象の空間内に設定された互いに異なる複数の前記待機位置のそれぞれに待機し、
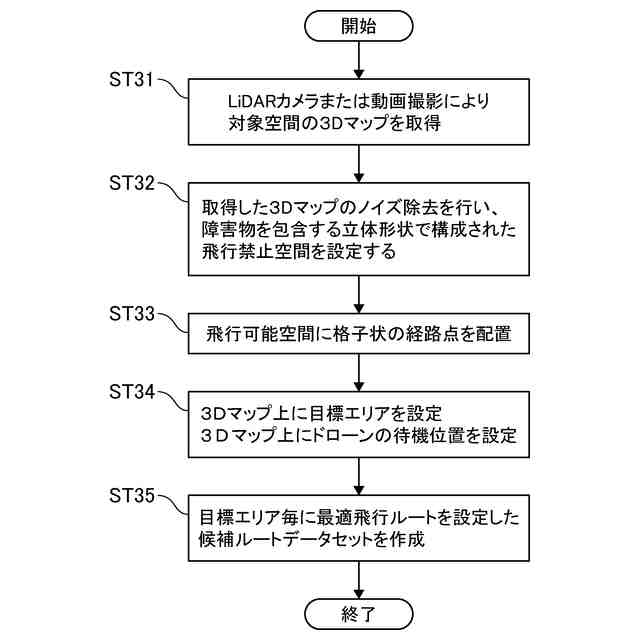
前記飛行ルート決定部は、前記3次元データを複数の目標エリアに分割して、前記複数の目標エリアのそれぞれに対して、前記複数の前記待機位置のいずれかからの飛行ルートを対応づけた候補ルートデータセットの中から、前記出現位置を含む前記目標エリアに対応づけられた前記飛行ルートを前記最適飛行ルートとして決定することを特徴とする請求項1に記載の害獣駆除システム。
【請求項3】
前記候補ルートデータセットに含まれる前記飛行ルートは、前記待機位置から前記目標エリアまで飛行する際の飛行時間および消費エネルギーの少なくとも一方に基づいて決定されていることを特徴とする請求項2に記載の害獣駆除システム。
【請求項4】
前記候補ルートデータセットに含まれる前記飛行ルートは、前記飛行時間が予め設定した基準飛行時間よりも短いことを特徴とする請求項3に記載の害獣駆除システム。
【請求項5】
前記候補ルートデータセットに含まれる前記飛行ルートは、前記3次元データ上に飛行禁止空間を設定し、前記飛行禁止空間を除く領域に格子状に配置した経路点を結ぶルートであることを特徴とする請求項3に記載の害獣駆除システム。
【請求項6】
前記動物検出部は、前記動物検出モデルを用いて、前記カメラ画像から前記駆除対象の動物が写っている画像部位を抽出し、抽出した前記画像部位を取り囲む大きさのバウンディングボックスを生成し、
前記出現位置特定部は、前記カメラ画像内の前記バウンディングボックスの座標から前記出現位置を示す3次元座標を特定することを特徴とする請求項1に記載の害獣駆除システム。
【請求項7】
前記出現位置特定部は、前記出現位置を示す3次元座標をクラウドサーバに送信し、
前記3次元データおよび前記候補ルートデータセットは、前記クラウドサーバに記憶されることを特徴とする請求項2に記載の害獣駆除システム。
【請求項8】
前記動物検出モデルからの出力データを前記クラウドサーバまたは前記制御装置に設けられた動物検出履歴データベースに記憶させることを特徴とする請求項7に記載の害獣駆除システム。
【請求項9】
前記カメラは、前記監視対象の空間の壁面に沿って複数配置され、床を向いて撮影し、
前記最適飛行ルートは、前記監視対象の空間の床に沿って飛行するルートであることを特徴とする請求項1に記載の害獣駆除システム。
【請求項10】
前記カメラは、赤外線カメラであることを特徴とする請求項1に記載の害獣駆除システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ドローンなどの無人航空機を用いてネズミなどの害獣を駆除するための害獣駆除システムおよび害獣駆除プログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来から、倉庫などの建物に侵入したネズミなどの小動物による被害が問題になっている。ネズミの駆除方法としては、ネズミ忌避剤(匂い)や電池式ネズミ駆除器(音)によりネズミを追い出す方法、ネズミの侵入経路を網や粘着シートにより遮断する方法が用いられている。
【0003】
一方、近年においては、ドローンなどの小型の飛行装置を用いて害獣を追い払う技術の開発が行われている。特許文献1には、害獣を検知した場合に、ドローンにより害獣(例えば、鹿、猪、猿、鳥など)を追い払うシステム(無人飛行装置制御システム)が記載される。
【0004】
特許文献1の無人飛行装置制御システムは、監視対象の領域にカメラを設置し、カメラの画像から害獣を機械学習モデルにより検知する。そして、害獣を検知した場合は、害獣の現在位置に基づいて、害獣が侵入中の領域から出ていきやすい位置(例えば、獣道)のうちの1つを退去位置に設定する。そして、退去位置へ害獣を向かわせるための飛行指示をドローンに送信する。例えば、害獣が検知された位置から退去位置へ害獣を追うように、あるいは、退去位置へ向けて害獣を誘導するようにドローンを飛行させる。
【先行技術文献】
【特許文献】
【0005】
特許第6704979号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1のシステムは、屋外の開けた空間での運用を想定しており、様々な物資が収容される倉庫などのように、飛行経路が限定される空間での運用は想定されていない。また、ドローンの飛行経路の決定方法について具体的に示されていない。
【0007】
ドローンにより害獣を追い払うシステムを屋内において運用する場合、障害物を回避しながら最短経路で飛行するのが難しい。また、飛行経路上の障害物を検知し、その都度回避運動をしながら飛行するのでは、検知された動物(害獣)に速やかに近づくことができない。そのため、害獣を追い払うことができないおそれがある。
【0008】
本発明の目的は、このような点に鑑みて、屋内でも害獣を追い払うことができる害獣駆除システムを提供することにある。
【課題を解決するための手段】
【0009】
上記の課題を解決するために、本発明の害獣駆除システムは、監視対象の空間を撮影するカメラと、前記監視対象の空間を飛行する無人航空機と、前記無人航空機および前記カメラと通信可能な制御装置を有し、前記制御装置は、機械学習により作成した動物検出モデルを用いて前記カメラにより撮影したカメラ画像から駆除対象の動物を検出する動物検出部と、前記動物検出モデルからの出力データおよび前記監視対象の空間の3次元データを用いて前記監視対象の空間における前記動物の出現位置を特定する出現位置特定部と、
前記3次元データを用いて前記無人航空機を待機させた待機位置から前記出現位置へ向かう最適飛行ルートを決定する飛行ルート決定部と、前記最適飛行ルートを飛行する飛行命令、および、前記無人航空機に予め設定した威嚇動作を行わせる威嚇命令を前記無人航空機に送信する無人航空機制御部を備えることを特徴とする。
【0010】
また、本発明の害獣駆除プログラムは、機械学習により作成した動物検出モデルを用いて、監視対象の空間に設置されたカメラにより撮影したカメラ画像から駆除対象の動物を検出する動物検出処理と、前記動物検出モデルからの出力データおよび前記監視対象の空間の3次元データを用いて前記監視対象の空間における前記動物の出現位置を特定する出現位置特定処理と、前記監視対象の空間を飛行する無人航空機を待機させた待機位置から前記出現位置へ向かう最適飛行ルートを、前記3次元データを用いて決定する飛行ルート決定処理と、前記最適飛行ルートを飛行する飛行命令、および、前記無人航空機に予め設定した威嚇動作を行わせる威嚇命令を前記無人航空機に送信する無人航空機制御処理と、を単独または複数のコンピュータに行わせることを特徴とする。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
ルアー
1か月前
個人
播種装置
1か月前
個人
巻糸係止具
7日前
個人
植物栽培用培地
18日前
個人
虫の生け捕り具
26日前
個人
植木鉢用台
14日前
個人
釣り仕掛け処理具
13日前
個人
プランターセット
1か月前
個人
生命力近親交配方法
1か月前
個人
養殖システム
1か月前
井関農機株式会社
作業車両
1か月前
岡部株式会社
浮魚礁
26日前
株式会社シマノ
釣竿
1か月前
井関農機株式会社
圃場作業機
7日前
個人
苔玉スタンド
14日前
井関農機株式会社
収穫作業車両
27日前
個人
漁業支援装置及び方法
1か月前
中国電力株式会社
巣撤去具
24日前
株式会社シマノ
ルアー
19日前
松山株式会社
農作業機
14日前
松山株式会社
農作業機
14日前
ウエダ産業株式会社
切断装置
1か月前
松山株式会社
農作業機
14日前
みのる産業株式会社
苗植付装置
11日前
みのる産業株式会社
苗植付装置
11日前
個人
落口枡用取付部材及び落口枡
1か月前
個人
給水方法及びこれを用いた給水装置
12日前
鹿島建設株式会社
レインガーデン
1か月前
第一衛材株式会社
ペット用おむつ
24日前
トヨタ自動車株式会社
植物栽培装置
5日前
株式会社クボタ
田植機
7日前
一般社団法人NAGOYA
電子機器
11日前
OTIS株式会社
ルアー用スカート
1か月前
個人
大型ペット用安定供給水やりシステム
21日前
株式会社クボタ
作業車
6日前
株式会社クボタ
田植機
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ