TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024112524
公報種別
公開特許公報(A)
公開日
2024-08-21
出願番号
2023017601
出願日
2023-02-08
発明の名称
歩行制御方法
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
5/00 20060101AFI20240814BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】外乱が生じた場合であってもロバストに継続歩行することができる歩行制御方法を提供することを目的とする。
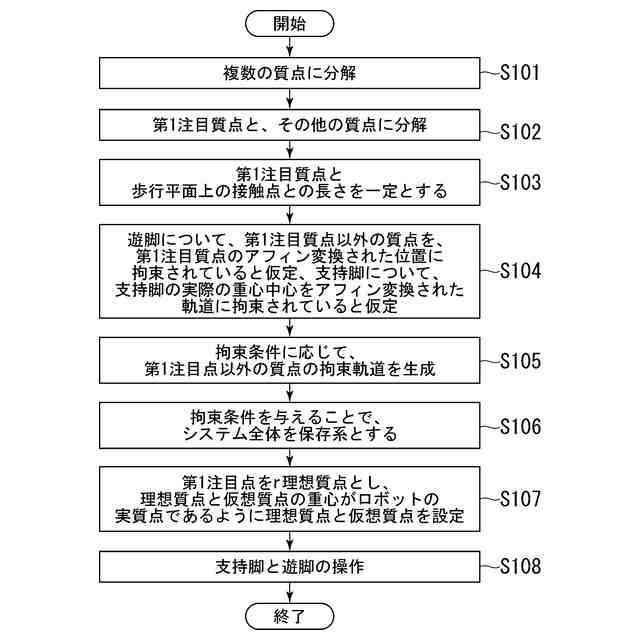
【解決手段】脚部を有する移動装置を、複数の質点に分解し、分解された複数の質点を、第1注目質点と、前記第1注目質点以外の質点に分解し、第1注目質点と歩行平面上の接触点との長さが一定であるとし、第1注目質点以外の質点は、第1注目質点のアフィン変換された位置に拘束されるとし、第1注目質点が動かされると、拘束に従い、第1注目質点以外の質点の拘束軌道を生成し、単質点モデルに、遊脚運動に関する追加質点を加えた多質点モデルを用いて、追加質点の重心が追加質点の重心位置のアフィン変換となるような拘束軌道を与えることで、システム全体を保存系とし、第1注目質点を理想質点とし、理想質点と仮想質点の重心が移動装置の実質点であるように仮想質点と理想質点を設定する、歩行制御方法。
【選択図】図17
特許請求の範囲
【請求項1】
歩行制御装置が、
脚部を有する移動装置を、複数の質点に分解し、
分解された前記複数の質点を、第1注目質点と、前記第1注目質点以外の質点に分解し、
前記第1注目質点と歩行平面上の接触点との長さが一定であるとし、
前記第1注目質点以外の質点は、前記第1注目質点のアフィン変換された位置に拘束されるとし、
前記第1注目質点が動かされると、前記拘束に従い、前記第1注目質点以外の質点の拘束軌道を生成し、
単質点モデルに、遊脚運動に関する追加質点を加えた多質点モデルを用いて、前記追加質点の重心が前記追加質点の重心位置のアフィン変換となるような拘束軌道を与えることで、システム全体を保存系とし、
前記第1注目質点を理想質点とし、
前記理想質点と仮想質点の重心が前記移動装置の実質点であるように仮想質点と理想質点を設定する、
歩行制御方法。
続きを表示(約 730 文字)
【請求項2】
前記理想質点の長さが一定であるとする、
請求項1に記載の歩行制御方法。
【請求項3】
前記実質点の位置は、前記移動装置が備える脚の支持脚重心位置である、
請求項1または請求項2に記載の歩行制御方法。
【請求項4】
前記移動装置の歩行開始時の前記実質点の位置と前記理想質点の位置と仮想質点の位置は同じ位置である、
請求項1または請求項2に記載の歩行制御方法。
【請求項5】
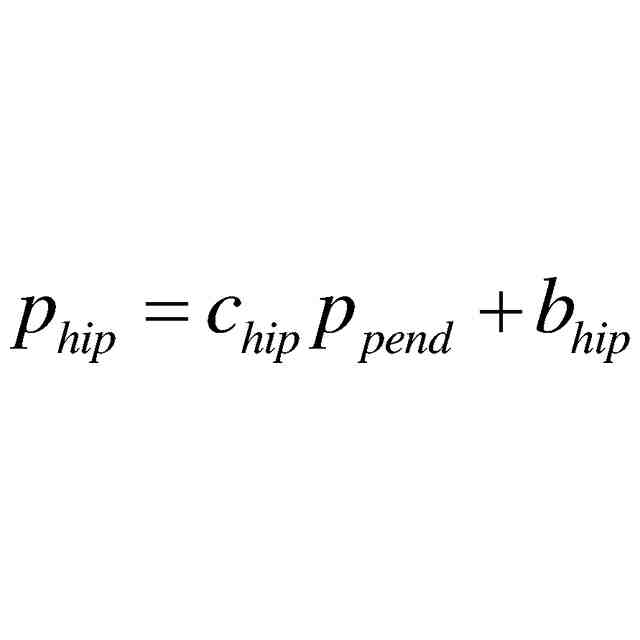
前記移動装置が移動中において、前記実質点の移動時の軌道は、次式であり、
TIFF
2024112524000045.tif
12
170
c
hip
は移動時の単脚支持時の状態毎のパラメータであり、p
pend
は理想質点であり、b
hip
は移動時の単脚支持時の状態毎のパラメータである、
請求項1または請求項2に記載の歩行制御方法。
【請求項6】
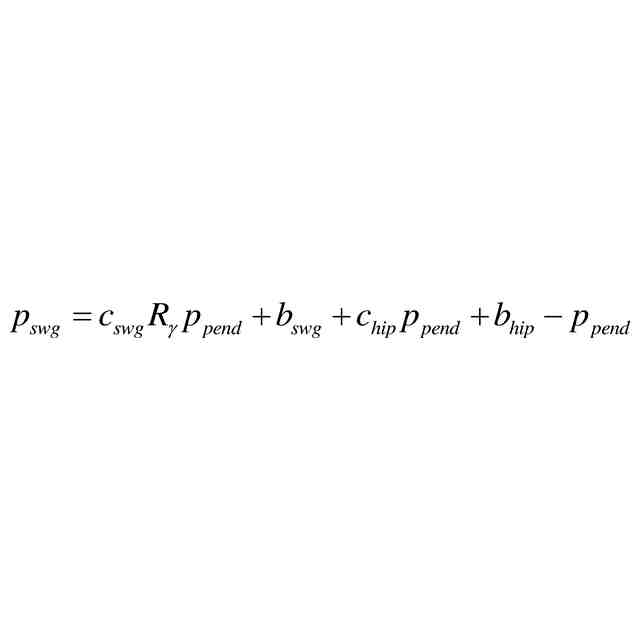
前記移動装置が移動中において、前記移動装置が備える脚の遊脚の軌道は、次式であり、
TIFF
2024112524000046.tif
12
170
c
swg
は移動時の遊脚軌道のパラメータであり、R
γ
はcosとsinで表されている回転行列であり、b
swg
は移動時の遊脚軌道のパラメータであり、b
hip
は移動時の単脚支持時の状態毎のパラメータである、
請求項1または請求項2に記載の歩行制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、歩行制御方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、二足歩行ロボットの研究が進められている。ロボットが人間のように歩けるようになるには、特に耐故障性や効率性の面で機能が十分でない。二足歩行ロボットでは、柔らかさを加えることでロボットの耐故障性が向上し、関節のトルク制御が可能なロボットの開発も行われている。
【0003】
例えば、弾性を有する脚式ロボットの歩行の制御方法では、例えば歩行の巨視的な運動に着目した3つの要素(胴体姿勢制御,蹴りだし制御,接地位置制御)に分解して歩行を実現する制御手法がある。例えば非特許文献1では、歩行の要素分解を、人間の歩行動作に着目した巨視的な挙動に分解している。要素は、蹴り、遊脚・歩幅、状態姿勢維持の3つの能動的である。この手法は、Raibertらが提案した走行制御の手法である(非特許文献1参照)。
【0004】
また、Hodginsが、この手法を歩行に拡張した(非特許文献2参照)。なお、Hodgingsが行った3分割制御は、歩幅制御、高さ制御および姿勢制御の3つの独立した制御則からなる。歩幅制御では、水平速度を目標値に追従させるように歩幅を制御する。ただし、歩幅制御では、定常歩行では不要である。高さ制御では、遊脚着床時に次の片脚支持期の胴体の目標高さを満たすように後ろ脚の蹴りによってエネルギーを印加する。姿勢制御では、胴体の姿勢を鉛直に保つためにフィードバック制御する。
【先行技術文献】
【非特許文献】
【0005】
Marc H. Raibert, ”Legged Robots That Balance (Artificial Intelligence)”, MIT Press, 1986
J. K. Hodgins, “Biped gait transitions,” in Proc. IEEE Int. Conf. Robot. Autom, 1991, pp. 2092-2097.
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、これらの従来技術では、外乱が生じる状況において遊脚が接地するときの状況が変化し、接地の仕方によっては転倒することが発生する場合があった。
【0007】
本発明は、上記の問題点に鑑みてなされたものであって、外乱が生じた場合であってもロバストに継続歩行することができる歩行制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
(1)上記目的を達成するため、本発明の一態様に係る歩行制御方法は、歩行制御装置が、脚部を有する移動装置を、複数の質点に分解し、分解された前記複数の質点を、第1注目質点と、前記第1注目質点以外の質点に分解し、前記第1注目質点と歩行平面上の接触点との長さが一定であるとし、前記第1注目質点以外の質点は、前記第1注目質点のアフィン変換された位置に拘束されるとし、前記第1注目質点が動かされると、前記拘束に従い、前記第1注目質点以外の質点の拘束軌道を生成し、単質点モデルに、遊脚運動に関する追加質点を加えた多質点モデルを用いて、前記追加質点の重心(p
add
)が前記追加質点の重心位置(分解前のp
pend
)のアフィン変換となるような拘束軌道を与えることで、システム全体を保存系とし、前記第1注目質点を理想質点(分解後のp
pend
)とし、前記理想質点(p
pend
)と仮想質点(p
impend
)の重心が前記移動装置の実質点(p
hip
)であるように仮想質点と理想質点を設定する、歩行制御方法である。
【0009】
(2)本発明の一態様に係る歩行制御方法は、前記理想質点(p
pend
)の長さが一定であるとする、上記(1)に記載の歩行制御方法である。
【0010】
(3)本発明の一態様に係る歩行制御方法は、前記実質点(p
hip
)の位置は、前記移動装置が備える脚の支持脚重心位置である、上記(1)または(2)に記載の歩行制御方法である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
車体構造
5日前
本田技研工業株式会社
回転電機
19日前
本田技研工業株式会社
着磁装置
13日前
本田技研工業株式会社
電力装置
16日前
本田技研工業株式会社
回転電機
6日前
本田技研工業株式会社
車体構造
13日前
本田技研工業株式会社
回転電機
6日前
本田技研工業株式会社
車体構造
5日前
本田技研工業株式会社
ステータ
20日前
本田技研工業株式会社
無段変速機
9日前
本田技研工業株式会社
無段変速機
9日前
本田技研工業株式会社
鞍乗型車両
19日前
本田技研工業株式会社
鞍乗型車両
15日前
本田技研工業株式会社
揺動式車両
5日前
本田技研工業株式会社
車体前部構造
22日前
本田技研工業株式会社
車両システム
13日前
本田技研工業株式会社
運転制御装置
12日前
本田技研工業株式会社
車体下部構造
22日前
本田技研工業株式会社
車体前部構造
22日前
本田技研工業株式会社
電源システム
12日前
本田技研工業株式会社
車両システム
9日前
本田技研工業株式会社
バッテリ装置
22日前
本田技研工業株式会社
車両制御装置
15日前
本田技研工業株式会社
車体下部構造
22日前
本田技研工業株式会社
運転支援装置
22日前
本田技研工業株式会社
車両制御装置
22日前
本田技研工業株式会社
車両の床構造
6日前
本田技研工業株式会社
鞍乗り型車両
19日前
本田技研工業株式会社
温調システム
22日前
本田技研工業株式会社
車体下部構造
22日前
本田技研工業株式会社
モータ制御装置
13日前
本田技研工業株式会社
燃料電池システム
16日前
本田技研工業株式会社
仮想空間演出装置
23日前
本田技研工業株式会社
仮想空間演出装置
23日前
本田技研工業株式会社
回転電機の冷却構造
16日前
本田技研工業株式会社
着磁装置及び着磁方法
13日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ