TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024099938
公報種別
公開特許公報(A)
公開日
2024-07-26
出願番号
2023003588
出願日
2023-01-13
発明の名称
装置、方法、および、プログラム
出願人
横河電機株式会社
代理人
弁理士法人RYUKA国際特許事務所
主分類
G05D
1/43 20240101AFI20240719BHJP(制御;調整)
要約
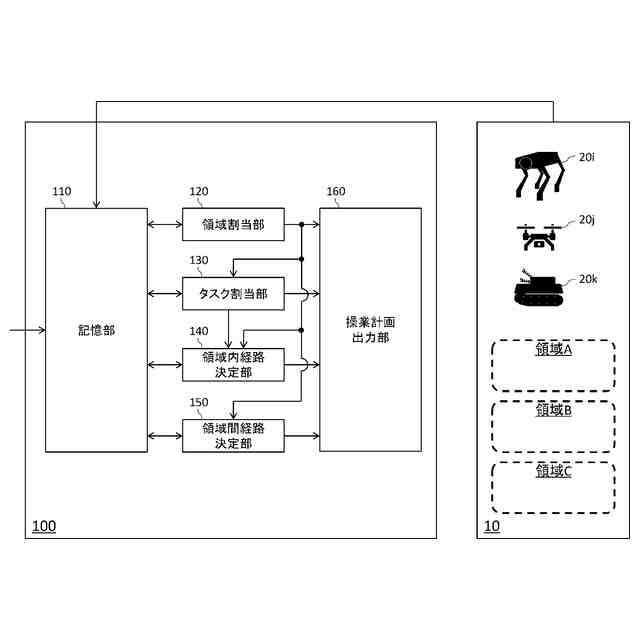
【解決手段】複数のロボットの仕様、および、操業対象となる設備において実行すべき複数のタスクの要件に基づいて、前記複数のロボットを前記設備を分割した複数の領域に割り当てる領域割当を実行する領域割当部と、前記複数の領域のそれぞれである対象領域について、前記複数のロボットのうちの前記対象領域に割り当てられた少なくとも1つのロボットである対象ロボットに対して、前記複数のタスクのうちの前記対象領域に属する少なくとも1つのタスクである領域内タスクを割り当てるタスク割当を実行するタスク割当部と、を備える、装置を提供する。
【選択図】図1
特許請求の範囲
【請求項1】
複数のロボットの仕様、および、操業対象となる設備において実行すべき複数のタスクの要件に基づいて、前記複数のロボットを前記設備を分割した複数の領域に割り当てる領域割当を実行する領域割当部と、
前記複数の領域のそれぞれである対象領域について、前記複数のロボットのうちの前記対象領域に割り当てられた少なくとも1つのロボットである対象ロボットに対して、前記複数のタスクのうちの前記対象領域に属する少なくとも1つのタスクである領域内タスクを割り当てるタスク割当を実行するタスク割当部と、
を備える、装置。
続きを表示(約 1,000 文字)
【請求項2】
前記タスク割当の結果に基づいて前記対象ロボットを前記対象領域内で移動させる領域内経路を決定する領域内経路決定部を更に備える、請求項1に記載の装置。
【請求項3】
前記領域割当の結果に基づいて前記複数のロボットを前記複数の領域のうちの領域間で移動させる領域間経路を決定する領域間経路決定部を更に備える、請求項2に記載の装置。
【請求項4】
前記領域割当部は、一の時間スロットにおける前記領域割当において、他の時間スロットにおける前記領域割当の結果に基づいて、前記複数のロボットの各々について前記一の時間スロットにおける始点位置および終点位置を決定する、請求項3に記載の装置。
【請求項5】
前記領域内経路決定部は、前記一の時間スロットにおける前記始点位置および前記終点位置にしたがって、前記領域内経路を決定する、請求項4に記載の装置。
【請求項6】
前記領域間経路決定部は、前記一の時間スロットにおける前記終点位置および後続する時間スロットにおける前記始点位置にしたがって、前記領域間経路を決定する、請求項5に記載の装置。
【請求項7】
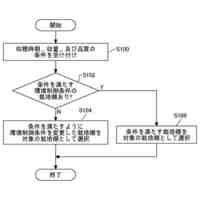
前記複数のロボットのうちの1つ以上のロボットにおける仕様を示す仕様情報、および、前記複数のタスクのうちの1つ以上のタスクの要件を示すタスク情報に基づいて、前記1つ以上のロボットが前記1つ以上のタスクを実行可能かどうかを示す実行可否を判定する可否判定部を更に備え、
前記領域割当部は、前記実行可否に基づいて前記領域割当を実行する、請求項1から6のいずれか一項に記載の装置。
【請求項8】
前記可否判定部は、前記複数のロボットの各々における仕様を示す仕様情報、および、前記複数のタスクの要件を示すタスク情報に基づいて、前記複数のロボットの各々が前記複数のタスクの各々を実行可能かどうかを示す実行可否を判定する、請求項7に記載の装置。
【請求項9】
前記可否判定部は、前記複数のタスクの各々が属する領域毎の前記設備の環境を示す環境情報に更に基づいて、前記実行可否を判定する、請求項8に記載の装置。
【請求項10】
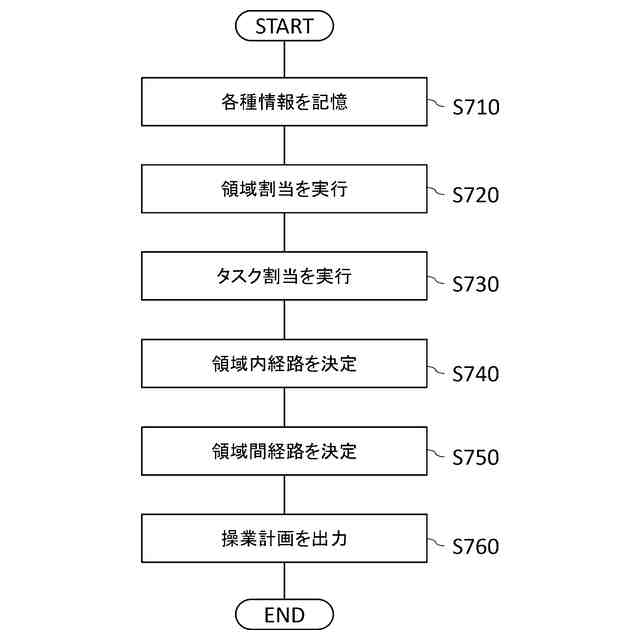
前記領域割当の結果、前記タスク割当の結果、前記領域内経路、または、前記領域間経路の少なくともいずれかを操業計画として出力する操業計画出力部を更に備える、請求項3から6のいずれか一項に記載の装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、装置、方法、および、プログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、「自律マルチプラットフォームロボットシステム」が記載されている。特許文献2には、「マルチロボット環境においてノンプリエンプティブタスクのスケジューリングを最適化するためのシステム及び方法」が記載されている。
[先行技術文献]
[特許文献]
[特許文献1] 特表2003-515801
[特許文献2] 特開2020-149675
【発明の概要】
【0003】
本発明の第1の態様においては、装置を提供する。前記装置は、複数のロボットの仕様、および、操業対象となる設備において実行すべき複数のタスクの要件に基づいて、前記複数のロボットを前記設備を分割した複数の領域に割り当てる領域割当を実行する領域割当部と、前記複数の領域のそれぞれである対象領域について、前記複数のロボットのうちの前記対象領域に割り当てられた少なくとも1つのロボットである対象ロボットに対して、前記複数のタスクのうちの前記対象領域に属する少なくとも1つのタスクである領域内タスクを割り当てるタスク割当を実行するタスク割当部と、を備える。
【0004】
前記装置は、前記タスク割当の結果に基づいて前記対象ロボットを前記対象領域内で移動させる領域内経路を決定する領域内経路決定部を更に備えてもよい。
【0005】
前記装置のいずれかは、前記領域割当の結果に基づいて前記複数のロボットを前記複数の領域のうちの領域間で移動させる領域間経路を決定する領域間経路決定部を更に備えてもよい。
【0006】
前記装置のいずれかにおいて、前記領域割当部は、一の時間スロットにおける前記領域割当において、他の時間スロットにおける前記領域割当の結果に基づいて、前記複数のロボットの各々について前記一の時間スロットにおける始点位置および終点位置を決定してもよい。
【0007】
前記装置のいずれかにおいて、前記領域内経路決定部は、前記一の時間スロットにおける前記始点位置および前記終点位置にしたがって、前記領域内経路を決定してもよい。
【0008】
前記装置のいずれかにおいて、前記領域間経路決定部は、前記一の時間スロットにおける前記終点位置および後続する時間スロットにおける前記始点位置にしたがって、前記領域間経路を決定してもよい。
【0009】
前記装置のいずれかは、前記複数のロボットのうちの1つ以上のロボットにおける仕様を示す仕様情報、および、前記複数のタスクのうちの1つ以上のタスクの要件を示すタスク情報に基づいて、前記1つ以上のロボットが前記1つ以上のタスクを実行可能かどうかを示す実行可否を判定する可否判定部を更に備え、前記領域割当部は、前記実行可否に基づいて前記領域割当を実行してもよい。
【0010】
前記装置のいずれかにおいて、前記可否判定部は、前記複数のロボットの各々における仕様を示す仕様情報、および、前記複数のタスクの要件を示すタスク情報に基づいて、前記複数のロボットの各々が前記複数のタスクの各々を実行可能かどうかを示す実行可否を判定してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
横河電機株式会社
酸発生剤
3日前
横河電機株式会社
モジュール
2日前
横河電機株式会社
観察培養装置
7日前
横河電機株式会社
海洋肥沃化装置
3日前
横河電機株式会社
測定器及びプログラム
8日前
横河電機株式会社
装置、方法およびプログラム
7日前
横河電機株式会社
装置、方法およびプログラム
7日前
横河電機株式会社
装置、方法およびプログラム
7日前
横河電機株式会社
装置、方法およびプログラム
7日前
横河電機株式会社
装置、方法およびプログラム
7日前
横河電機株式会社
装置、方法、及びプログラム
8日前
横河電機株式会社
装置、方法およびプログラム
7日前
横河電機株式会社
装置、方法およびプログラム
3日前
横河電機株式会社
装置、方法およびプログラム
3日前
横河電機株式会社
情報処理装置及び装置保護方法
3日前
横河電機株式会社
センサシステム及びセンサデバイス
1日前
横河電機株式会社
測定システム、及び、中間モジュール
7日前
横河電機株式会社
推薦方法、推薦プログラム及び推薦装置
3日前
横河電機株式会社
推薦方法、推薦プログラム及び推薦装置
3日前
横河電機株式会社
支援装置、支援方法及び支援プログラム
11日前
横河電機株式会社
装置、システム、方法またはプログラム
7日前
横河電機株式会社
コントローラ、制御システム、及び制御方法
7日前
横河電機株式会社
装置、方法、生成装置、および、プログラム
14日前
横河電機株式会社
情報処理装置、情報処理方法、及びプログラム
8日前
横河電機株式会社
植物管理装置、植物管理方法、及びプログラム
14日前
横河電機株式会社
情報処理装置、解析方法および解析プログラム
3日前
横河電機株式会社
動画管理システム、動画管理方法、及び、管理装置
9日前
横河電機株式会社
情報提供装置、情報提供方法及び情報提供プログラム
3日前
横河電機株式会社
設備を保守するための装置、方法、およびプログラム
3日前
横河電機株式会社
情報処理方法、情報処理プログラム及び情報処理装置
3日前
横河電機株式会社
評価支援装置、評価支援方法および評価支援プログラム
今日
横河電機株式会社
ディスクユニット、共焦点スキャナ、及び共焦点顕微鏡
7日前
横河電機株式会社
情報処理装置、情報処理方法および情報処理プログラム
8日前
横河電機株式会社
評価支援装置、評価支援方法および評価支援プログラム
今日
横河電機株式会社
電子機器、再コンフィグレーション方法およびプログラム
8日前
横河電機株式会社
情報処理プログラム、情報処理方法、および情報処理装置
11日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ