TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025131490
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024188431
出願日
2024-10-25
発明の名称
認識システム、認識装置、認識方法、認識プログラム
出願人
株式会社デンソー
代理人
個人
,
個人
主分類
G06T
7/00 20170101AFI20250902BHJP(計算;計数)
要約
【課題】透光体に対する認識精度を確保する認識システムの提供。
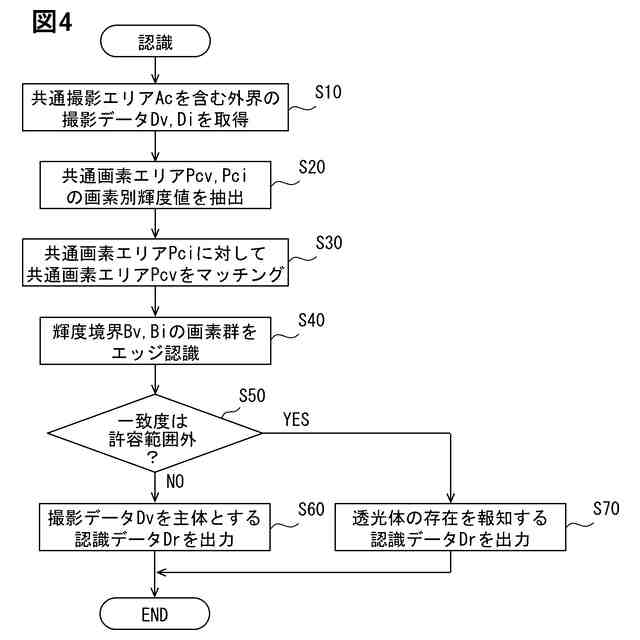
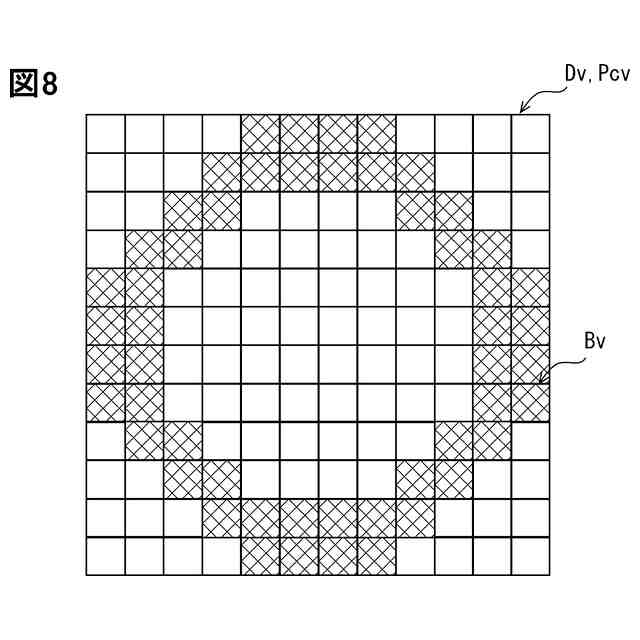
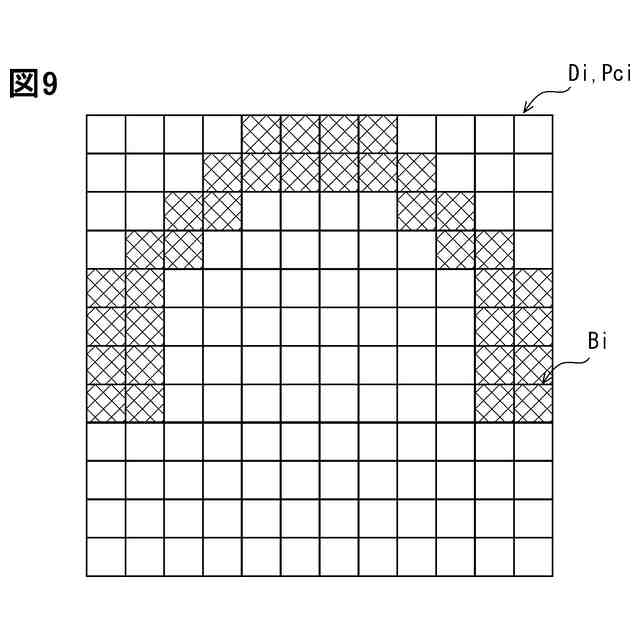
【解決手段】可視域カメラ及び赤外域カメラを搭載したホスト車両の外界を認識して認識データDrを生成する認識システムのプロセッサは、外界に対して可視域カメラにより撮影された可視域撮影データDv、及び可視域カメラとの共通撮影エリアAcを含む外界に対して赤外域カメラにより撮影された赤外域撮影データDiを、取得することと、可視域撮影データDv及び赤外域撮影データDiの各々においてエッジ認識される輝度境界Bv,Bi同士での一致度が許容範囲外まで低下するのに応答して、共通撮影エリアAcにおける透光体の存在を報知する認識データDrを、出力することとを、実行するように構成される。
【選択図】図4
特許請求の範囲
【請求項1】
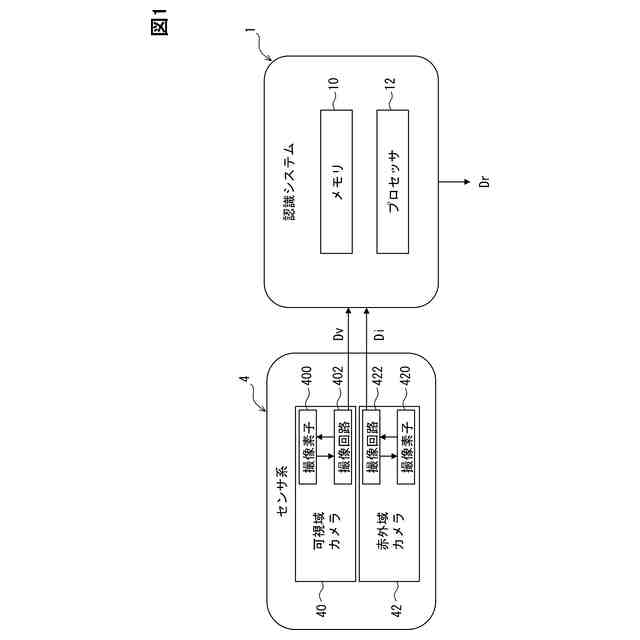
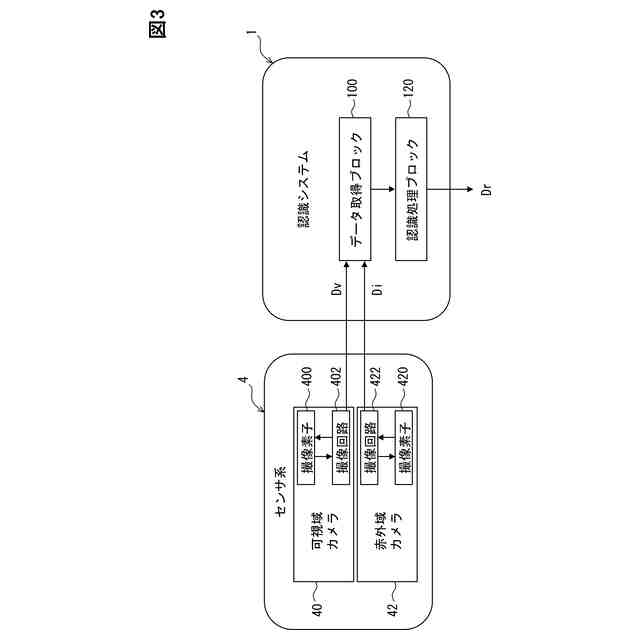
プロセッサ(12)を有し、可視域カメラ(40)及び赤外域カメラ(42)を搭載したホスト車両(2)の外界を認識して認識データ(Dr)を生成する認識システムであって、
前記プロセッサは、
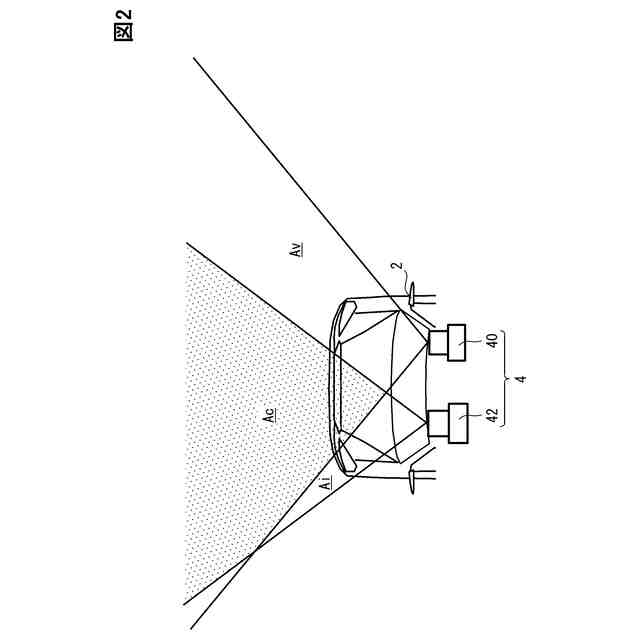
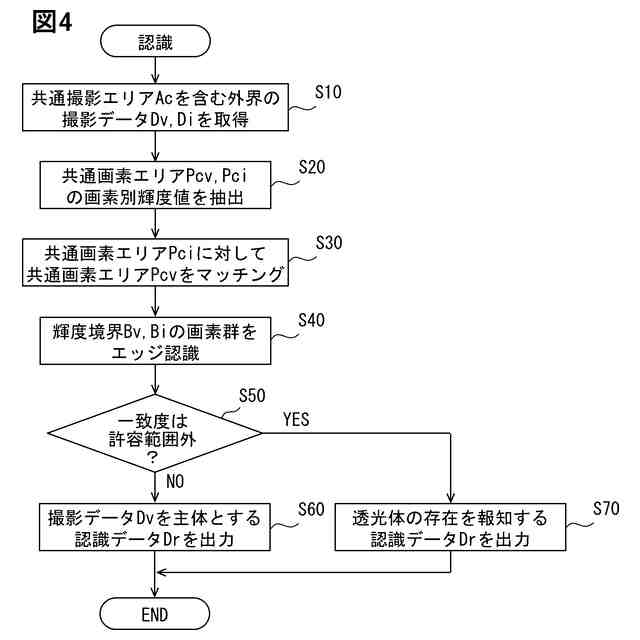
前記外界に対して前記可視域カメラにより撮影された可視域撮影データ(Dv)、及び前記可視域カメラとの共通撮影エリア(Ac)を含む前記外界に対して前記赤外域カメラにより撮影された赤外域撮影データ(Di)を、取得することと、
前記可視域撮影データ及び前記赤外域撮影データの各々においてエッジ認識される輝度境界(Bv,Bi)同士での一致度が許容範囲外まで低下するのに応答して、前記共通撮影エリアにおける透光体(30)の存在を報知する前記認識データを、出力することとを、実行するように構成される認識システム。
続きを表示(約 2,200 文字)
【請求項2】
前記可視域撮影データ及び前記赤外域撮影データの取得は、
前記可視域カメラにより前記透光体を透過して撮影される静止物体(32)が、前記共通撮影エリアを含む前記可視域カメラの視野(Av)の内部に含まれる前記外界に対して、前記赤外域カメラにより撮影された前記赤外域撮影データを、取得することを、含む請求項1に記載の認識システム。
【請求項3】
前記可視域撮影データ及び前記赤外域撮影データの取得は、
前記可視域カメラにより前記透光体を透過して撮影される壁体(34)が、前記共通撮影エリアを含む前記可視域カメラの視野(Av)の内部に広がる前記外界に対して、前記赤外域カメラにより撮影された前記赤外域撮影データを、取得することを、含む請求項1に記載の認識システム。
【請求項4】
前記可視域撮影データ及び前記赤外域撮影データの取得は、
前記共通撮影エリアを撮影する画素数が相異なる前記可視域カメラ及び前記赤外域カメラにより個別に撮影された、前記可視域撮影データ及び前記赤外域撮影データを取得することを、含み、
前記認識データの出力は、
前記可視域撮影データ及び前記赤外域撮影データのうち前記共通撮影エリアに対して低解像度の一方となる低解像撮影データに、前記可視域撮影データ及び前記赤外域撮影データのうち前記共通撮影エリアに対して前記低解像撮影データよりも高解像度の他方となる高解像度撮影データを、ダウンサンプリングによりマッチングさせて前記一致度を判定することを、含む請求項1~3のいずれか一項に記載の認識システム。
【請求項5】
前記可視域撮影データ及び前記赤外域撮影データの取得は、
前記低解像撮影データとなる前記赤外域撮影データを取得することを、含む請求項4に記載の認識システム。
【請求項6】
前記認識データの出力は、
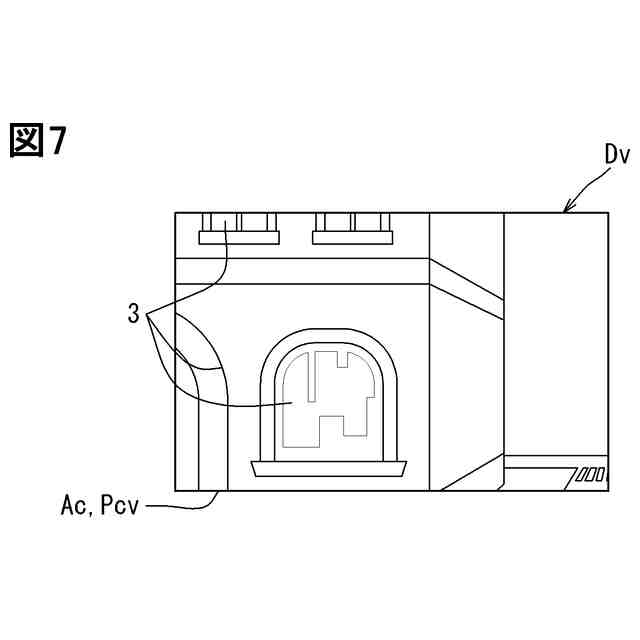
前記一致度が前記許容範囲外まで低下し、且つ物体の可視像が前記可視域撮影データの前記共通撮影エリアを撮影した共通画素エリア(Pcv)に認識されるのに応答して、前記共通撮影エリアにおける前記透光体の存在を報知する前記認識データを、出力することを、含む請求項1~3のいずれか一項に記載の認識システム。
【請求項7】
前記認識データの出力は、
前記一致度が前記許容範囲外まで低下し、且つ前記ホスト車両からの輻射熱による赤外像が前記赤外域撮影データの前記共通撮影エリアを撮影した共通画素エリア(Pci)に認識されるのに応答して、前記共通撮影エリアにおける前記透光体の存在を報知する前記認識データを、出力することを、含む請求項1~3のいずれか一項に記載の認識システム。
【請求項8】
可視域カメラ(40)及び赤外域カメラ(42)と共にホスト車両(2)に搭載可能に構成され、前記ホスト車両の外界を認識して認識データ(Dr)を生成するために、プロセッサ(12)を有する認識装置であって、
前記プロセッサは、
前記外界に対して前記可視域カメラにより撮影された可視域撮影データ(Dv)、及び前記可視域カメラとの共通撮影エリア(Ac)を含む前記外界に対して前記赤外域カメラにより撮影された赤外域撮影データ(Di)を、取得することと、
前記可視域撮影データ及び前記赤外域撮影データの各々においてエッジ認識される輝度境界(Bv,Bi)同士での一致度が許容範囲外まで低下するのに応答して、前記共通撮影エリアにおける透光体(30)の存在を報知する前記認識データを、出力することとを、実行するように構成される認識装置。
【請求項9】
可視域カメラ(40)及び赤外域カメラ(42)を搭載したホスト車両(2)の外界を認識して認識データ(Dr)を生成するために、プロセッサ(12)により実行される認識方法であって、
前記外界に対して前記可視域カメラにより撮影された可視域撮影データ(Dv)、及び前記可視域カメラとの共通撮影エリア(Ac)を含む前記外界に対して前記赤外域カメラにより撮影された赤外域撮影データ(Di)を、取得することと、
前記可視域撮影データ及び前記赤外域撮影データの各々においてエッジ認識される輝度境界(Bv,Bi)同士での一致度が許容範囲外まで低下するのに応答して、前記共通撮影エリアにおける透光体(30)の存在を報知する前記認識データを、出力することとを、含む認識方法。
【請求項10】
可視域カメラ(40)及び赤外域カメラ(42)を搭載したホスト車両(2)の外界を認識して認識データ(Dr)を生成するために記憶媒体(10)に記憶され、プロセッサ(12)により実行させる命令を含む認識プログラムであって、
前記外界に対して前記可視域カメラにより撮影された可視域撮影データ(Dv)、及び前記可視域カメラとの共通撮影エリア(Ac)を含む前記外界に対して前記赤外域カメラにより撮影された赤外域撮影データ(Di)を、取得することと、
前記可視域撮影データ及び前記赤外域撮影データの各々においてエッジ認識される輝度境界(Bv,Bi)同士での一致度が許容範囲外まで低下するのに応答して、前記共通撮影エリアにおける透光体(30)の存在を報知する前記認識データを、出力することとを、実行させる前記命令を含む認識プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の外界を認識する認識技術に、関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1に開示される認識技術は、車両に搭載される可視域カメラを組み合わせることにより、車両の外界に存在する透光体を認識可能にしている。
【先行技術文献】
【特許文献】
【0003】
特開2017-220923号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1の開示技術では、車両に搭載される可視域カメラの組み合わせであっても、例えばガラス等の透光体の反射率が可視光に対しては低いことに起因して、当該透光体の存在を認識する上での認識精度を十分に確保することが難しかった。
【0005】
本開示の課題は、透光体に対する認識精度を確保する認識システムを、提供することにある。本開示の別の課題は、透光体に対する認識精度を確保する認識装置を、提供することにある。本開示のまた別の課題は、透光体に対する認識精度を確保する認識方法を、提供することにある。本開示のさらに別の課題は、透光体に対する認識精度を確保する認識プログラムを、提供することにある。
【課題を解決するための手段】
【0006】
以下、課題を解決するための本開示の技術的手段について、説明する。尚、特許請求の範囲及び本欄に記載された括弧内の符号は、後に詳述する実施形態に記載された具体的手段との対応関係を示すものであり、本開示の技術的範囲を限定するものではない。
【0007】
本開示の第一態様は、
プロセッサ(12)を有し、可視域カメラ(40)及び赤外域カメラ(42)を搭載したホスト車両(2)の外界を認識して認識データ(Dr)を生成する認識システムであって、
プロセッサは、
外界に対して可視域カメラにより撮影された可視域撮影データ(Dv)、及び可視域カメラとの共通撮影エリア(Ac)を含む外界に対して赤外域カメラにより撮影された赤外域撮影データ(Di)を、取得することと、
可視域撮影データ及び赤外域撮影データの各々においてエッジ認識される輝度境界(Bv,Bi)同士での一致度が許容範囲外まで低下するのに応答して、共通撮影エリアにおける透光体(30)の存在を報知する認識データを、出力することとを、実行するように構成される。
【0008】
本開示の第二態様は、
可視域カメラ(40)及び赤外域カメラ(42)と共にホスト車両(2)に搭載可能に構成され、ホスト車両の外界を認識して認識データ(Dr)を生成するために、プロセッサ(12)を有する認識装置であって、
プロセッサは、
外界に対して可視域カメラにより撮影された可視域撮影データ(Dv)、及び可視域カメラとの共通撮影エリア(Ac)を含む外界に対して赤外域カメラにより撮影された赤外域撮影データ(Di)を、取得することと、
可視域撮影データ及び赤外域撮影データの各々においてエッジ認識される輝度境界(Bv,Bi)同士での一致度が許容範囲外まで低下するのに応答して、共通撮影エリアにおける透光体(30)の存在を報知する認識データを、出力することとを、実行するように構成される。
【0009】
本開示の第三態様は、
可視域カメラ(40)及び赤外域カメラ(42)を搭載したホスト車両(2)の外界を認識して認識データ(Dr)を生成するために、プロセッサ(12)により実行される認識方法であって、
外界に対して可視域カメラにより撮影された可視域撮影データ(Dv)、及び可視域カメラとの共通撮影エリア(Ac)を含む外界に対して赤外域カメラにより撮影された赤外域撮影データ(Di)を、取得することと、
可視域撮影データ及び赤外域撮影データの各々においてエッジ認識される輝度境界(Bv,Bi)同士での一致度が許容範囲外まで低下するのに応答して、共通撮影エリアにおける透光体(30)の存在を報知する認識データを、出力することとを、含む。
【0010】
本開示の第四態様は、
可視域カメラ(40)及び赤外域カメラ(42)を搭載したホスト車両(2)の外界を認識して認識データ(Dr)を生成するために記憶媒体(10)に記憶され、プロセッサ(12)により実行させる命令を含む認識プログラムであって、
外界に対して可視域カメラにより撮影された可視域撮影データ(Dv)、及び可視域カメラとの共通撮影エリア(Ac)を含む外界に対して赤外域カメラにより撮影された赤外域撮影データ(Di)を、取得することと、
可視域撮影データ及び赤外域撮影データの各々においてエッジ認識される輝度境界(Bv,Bi)同士での一致度が許容範囲外まで低下するのに応答して、共通撮影エリアにおける透光体(30)の存在を報知する認識データを、出力することとを、実行させる命令を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソー
携帯機
1か月前
株式会社デンソー
通信装置
10日前
株式会社デンソー
駆動装置
1か月前
株式会社デンソーウェーブ
携帯端末
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
電子装置
25日前
株式会社デンソー
受電装置
2か月前
株式会社デンソー
駆動装置
1か月前
株式会社デンソー
駆動装置
1か月前
株式会社デンソー
測距装置
15日前
株式会社デンソー
受電装置
1か月前
株式会社デンソー
圧電素子
1か月前
株式会社デンソー
平滑回路
4日前
株式会社デンソー
ステータ
24日前
株式会社デンソー
電子装置
22日前
株式会社デンソー
送電装置
25日前
株式会社デンソー
駆動装置
10日前
株式会社デンソー
電子装置
11日前
株式会社デンソー
書込装置
11日前
株式会社デンソー
光学部材
1か月前
株式会社デンソーエレクトロニクス
発音装置
2日前
株式会社デンソー
通信装置
1か月前
株式会社デンソー
ステータ
2か月前
株式会社デンソー
電子装置
29日前
株式会社デンソー
電子機器
1か月前
株式会社デンソー
電源装置
1か月前
株式会社デンソー
ステータ
29日前
株式会社デンソー
光学部材
5日前
株式会社デンソー
センサ装置
1か月前
株式会社デンソー
半導体装置
2か月前
株式会社デンソー
センサ素子
10日前
株式会社デンソー
ガスセンサ
11日前
株式会社デンソー
半導体装置
25日前
株式会社デンソー
回転体装置
8日前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
レーダ装置
22日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ