TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025118327
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024013593
出願日
2024-01-31
発明の名称
センサー装置、センサーモジュール、集積回路、傾斜角推定方法及び方位検知方法
出願人
株式会社東芝
代理人
個人
,
個人
,
個人
主分類
G01P
21/00 20060101AFI20250805BHJP(測定;試験)
要約
【課題】スケールファクタに対する依存性のない傾斜角推定を行うことが可能なセンサー装置、方位検知装置、センサーモジュール及び傾斜角推定方法を提供する。
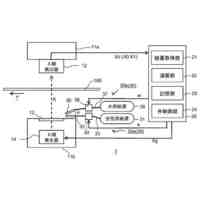
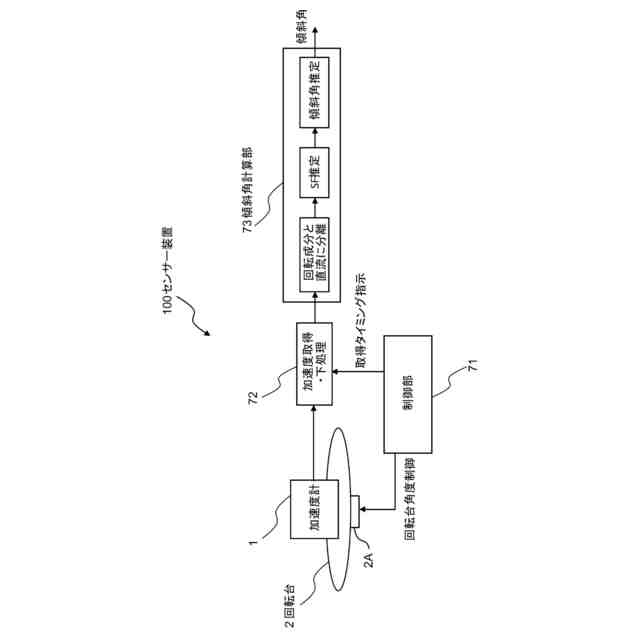
【解決手段】本実施形態に係るセンサー装置は、回転軸を中心として回転可能な回転系に、前記回転軸に垂直な面及び前記回転軸のいずれにも平行でない軸を有する加速度計が設けられ、前記回転系を回転させる機構と、回転させられる前記回転系の3点以上の回転角度に対応して前記加速度計で測定される加速度を取得し、前記加速度を前記回転系の回転に追従する第1成分と追従しない第2成分とに分離し、前記第1成分と前記第2成分とに基づいて、前記回転系の傾斜角を推定する、処理部と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
回転軸を中心として回転可能な回転系に、前記回転軸に垂直な面及び前記回転軸のいずれにも平行でない軸を有する加速度計が設けられ、前記回転系を回転させる機構と、
回転させられる前記回転系の3点以上の回転角度に対応して前記加速度計で測定される加速度を取得し、前記加速度を前記回転系の回転に追従する第1成分と追従しない第2成分とに分離し、前記第1成分と前記第2成分とに基づいて、前記回転系の傾斜角を推定する、処理部と、
を備えたセンサー装置。
続きを表示(約 1,100 文字)
【請求項2】
前記第1成分は、前記回転軸に垂直な前記面に平行な成分、前記第2成分は、前記面に垂直な成分である、
請求項1に記載のセンサー装置。
【請求項3】
前記回転系に、前記回転系の前記面に平行な軸を有するジャイロスコープが設けられ、
前記処理部は、回転させられる前記回転系の3点以上の回転角度に対応して前記ジャイロスコープで測定される角速度を取得し、前記角速度と、推定した前記回転系の前記傾斜角とに基づき、特定の方位の方向を推定する、
請求項1に記載のセンサー装置。
【請求項4】
前記特定の方位は、真北又は真南である、
請求項3に記載のセンサー装置。
【請求項5】
TIFF
2025118327000022.tif
56
170
【請求項6】
前記第1の値は61度、
前記第2の値は7度である、
請求項5に記載のセンサー装置。
【請求項7】
請求項7に記載のセンサー装置に備えられる、前記ジャイロスコープと前記加速度計とが1チップに集積された集積回路。
【請求項8】
請求項3に記載の
前記集積回路を実装したパッケージと、
前記パッケージを前記回転系に取り付けることが可能な機構と、
を備えたセンサーモジュール。
【請求項9】
回転軸を中心として回転可能な回転系に、前記面及び前記回転軸のいずれにも平行でない軸を有する加速度計が設けられた前記回転系を回転させ、
回転させられる前記回転系の3点以上の回転角度に対応して前記加速度計で測定される加速度を取得し、
前記加速度を前記回転系の回転に追従する第1成分と追従しない第2成分とに分離し、前記第1成分と前記第2成分とに基づいて、前記回転系の傾斜角を推定する、
傾斜推定方法。
【請求項10】
回転軸を中心として回転可能な回転系に設けられた、前記回転軸に垂直な面に平行な軸を有するジャイロスコープと、前記回転系に設けられ、前記面及び前記回転軸のいずれにも平行でない軸を有する加速度計と、を回転させ、
回転させられる前記回転系の3点以上の回転角度に対応して、前記ジャイロスコープおよび前記加速度計で測定される角速度及び速度を取得し、
前記加速度を前記回転系の回転に追従する第1成分と追従しない第2成分とに分離し、
前記第1成分と前記第2成分とに基づいて、前記回転系の傾斜角を推定し、
前記角速度と、推定した前記回転系の前記傾斜角とに基づき、特定の方位の方向を推定する、
方位検知方法。
発明の詳細な説明
【技術分野】
【0001】
本実施形態は、センサー装置、方位検知装置、センサーモジュール及び傾斜角推定方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
真北を検知する方法として一般には磁気が用いられる。しかし、地磁気は非常に微弱であり、近傍の磁化した金属に強く影響を受け正しい北を示さないことが多い。GPS(Global Positioning System)のオプションに方位を出す機能があるが、GPS衛星への見通しが確保できない屋内では使用できない。
【0003】
周囲の建造物の影響を受けずに高精度に真北を推定する方法として、ジャイロスコープを使用して地球の自転を検出する方法がある(非特許文献1)。
【0004】
図14を用いて説明する。(a)は地球を模した球であり、地球は角速度ω
ie
で自転している。黒い丸の位置Pでの真北を検知する例を考える。Pの位置でNED (North-East-Down)座標を形成する軸を矢印で示した。(b)はこれを水平面の真横から見た図である。地球は図の上向きを軸として回転している。Pの位置は緯度L[rad]である。Pでも角速度ω
ie
は図内上向きの回転として現れる。この回転は、北方向ベクトルNorthの方向の回転軸にcosLの大きさで射影される。すなわち、North方向に軸を持つジャイロをPの位置に置くとω
ie
cosLの大きさで地球の自転が観測できる。(c)はPをNED座標での真上、すなわち、地平を上から見た図である。ジャイロの軸を北ではなく、真北からα
i
(i=1, 2)だけ水平面上で回転させた角度に置く場合を考える。北方向への地球自転の射影ω
ie
cosLはさらに、α
i
の角度でジャイロの軸に射影され、各方向にジャイロ軸を置いた場合に検出される地球自転の角速度はω
ie
cosLcosα
i
となる。ω
ie
cosL=ω
iem
と置くと、ω
iem
cosαとなり、αを0~2πまで1周回転させると、地球自転の角速度は正弦波状に変化する。1周回転させた時に、地球自転の角速度はαが真北にある時に最も大きく観測される。
【0005】
したがって、地球自転を測定できる程度の高感度ジャイロを回転台に乗せ、水平面上でその軸を一周させて得た角速度の波形からピークを示したジャイロ軸の角度を検出することにより真北を検出できる。地球の自転を検出するものであるため、電波環境や磁気環境によらず検出可能である。
【先行技術文献】
【非特許文献】
【0006】
Yongjian Zhang, Bin Zhou , Mingliang Song, Bo Hou, Haifeng Xing and Rong Zhang, “A Novel MEMS Gyro North Finder Design Based on the Rotation Modulation Technique,” Sensors (Switzerland) vol.17 (5), Article number 973, 2017
【発明の概要】
【発明が解決しようとする課題】
【0007】
真北を正確に検出しようとする場合、ジャイロの軸を完全に水平面内で回転させる必要がある。もし回転台がNorthを軸として東西に若干傾いていると、回転台の面が、水平面と完全に一致する別の緯度経度の地点に置いてあるのと同じ動作となる。したがって北角度はPの経度ではなく、回転台面が水平面と一致する別の地点の緯度経度での北を示してしまう。
【0008】
真北の要求精度によるが、1度を下回るような精度が要求される場合、同程度の回転台の水平度が要求され、簡単には実現できない。
【0009】
この問題については、回転台を完全に水平に置かなくても、回転台上に軸を持つ加速度計を併設して、重力方向を検出し、傾きを測定することにより、完全に水平に置けなかったために生じた誤差を補正できることが示されている(非特許文献1)。
【0010】
回転台の傾斜は、実際には、ジャイロや加速度計の軸に対してピッチとロールの2つの角度で表されるが、説明を簡単にするために、加速度計の軸がそれに垂直な回転台面上の軸に対してθだけ傾いているとして、1つの傾き角θで説明する。図15(a)のように傾いた回転台に水平に軸を持つように加速度計を設置し、回転台を1周回転させると、重力の加速度計の軸への射影がやはり正弦波状に変化する。検出された加速度正弦波の振幅からθを求めることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
14日前
株式会社東芝
配線治具
1か月前
株式会社東芝
回路素子
13日前
株式会社東芝
燃料電池
26日前
株式会社東芝
ドア構造
今日
株式会社東芝
半導体装置
26日前
株式会社東芝
主幹制御器
1か月前
株式会社東芝
X線厚み計
19日前
株式会社東芝
ディスク装置
7日前
株式会社東芝
電力変換装置
11日前
株式会社東芝
開発支援装置
1日前
株式会社東芝
水中洗浄装置
1か月前
株式会社東芝
アンテナ装置
18日前
株式会社東芝
ディスク装置
4日前
株式会社東芝
計測システム
6日前
株式会社東芝
ディスク装置
1か月前
株式会社東芝
異常検出装置
5日前
株式会社東芝
紫外線照射装置
14日前
株式会社東芝
部材の接合方法
7日前
株式会社東芝
モールド真空バルブ
15日前
株式会社東芝
コイル及び磁性部品
1か月前
株式会社東芝
センサ及び電子装置
18日前
株式会社東芝
点検装置及び点検方法
18日前
株式会社東芝
制御装置及び制御方法
1か月前
株式会社東芝
測定方法及び測定システム
1か月前
株式会社東芝
制御方法及び電力変換装置
1か月前
株式会社東芝
密度判定装置及びその方法
5日前
株式会社東芝
磁気ディスク装置および方法
22日前
株式会社東芝
磁気ヘッド及び磁気記録装置
26日前
株式会社東芝
サーバシステム、及びサーバ
14日前
株式会社東芝
ハイブリッドサーボシステム
4日前
株式会社東芝
学習データの権利管理システム
1か月前
株式会社東芝
計測システム及び計測プログラム
6日前
株式会社東芝
信号処理装置および信号処理方法
26日前
株式会社東芝
磁気ヘッド、及び、磁気記録装置
5日前
株式会社東芝
磁気ヘッド、及び、磁気記録装置
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ