TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025114988
公報種別
公開特許公報(A)
公開日
2025-08-06
出願番号
2024009265
出願日
2024-01-25
発明の名称
ウェハ研磨設備及びウェハ薄板をピックアンドプレイスする方法
出願人
準力機械股分有限公司
代理人
個人
,
個人
主分類
H01L
21/68 20060101AFI20250730BHJP(基本的電気素子)
要約
【課題】ウェハ研磨設備及びウェハ薄板をピックアンドプレイスする方法を提供する。
【解決手段】本発明は、ウェハ研磨設備及びウェハ薄板をピックアンドプレイスする方法が公開されており、かかるウェハ研磨設備は、複数個のウェハホルダと、駆動装置と、研磨装置と、前置台と、後置台と、移載装置と、制御ユニットとを備え、その内、各ウェハホルダには、それぞれウェハ薄板を位置決めするために用いられる複数個の位置決め孔がそれぞれ間隔をおいて貫通形成され、各ウェハホルダには、それぞれ各ウェハホルダを区別して認識するために用いられる識別マークと、各位置決め孔の配置中心を認識するために用いられる第1位置決めマークと、各位置決め孔を認識するために用いられる孔位置マークとが形成され、本発明は、ウェハ薄板に対応して結び付け可能な識別マーク及び孔位置マークにより、ウェハ薄板の加工履歴を有利に追跡し得る研磨記録の生成を可能にしたものである。
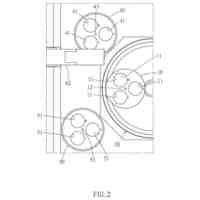
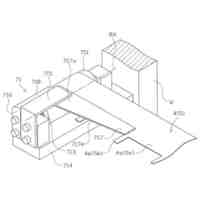
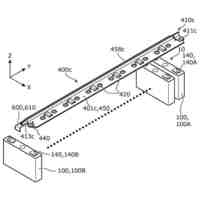
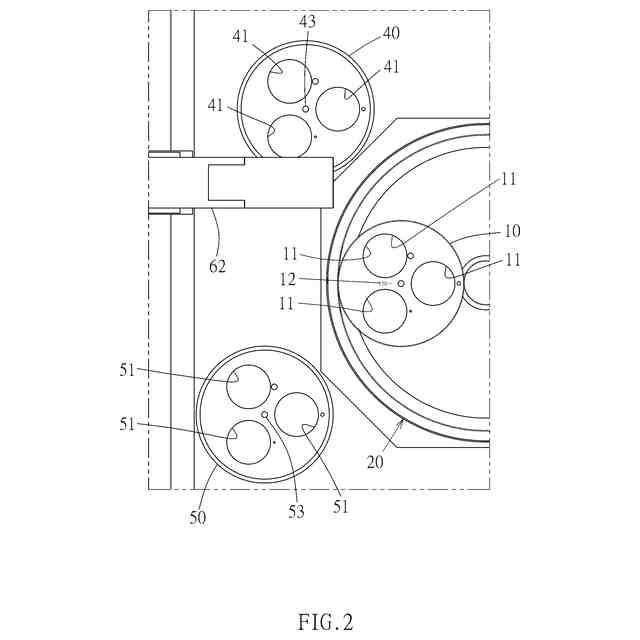
【選択図】図2
特許請求の範囲
【請求項1】
複数個のウェハホルダ(10)と、駆動装置(20)と、研磨装置(30)と、前置台(40)と、後置台(50)と、移載装置(60)と、制御ユニット(70)とを備えるウェハ研磨設備であって、
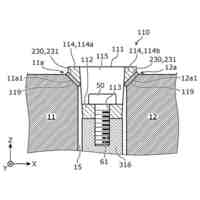
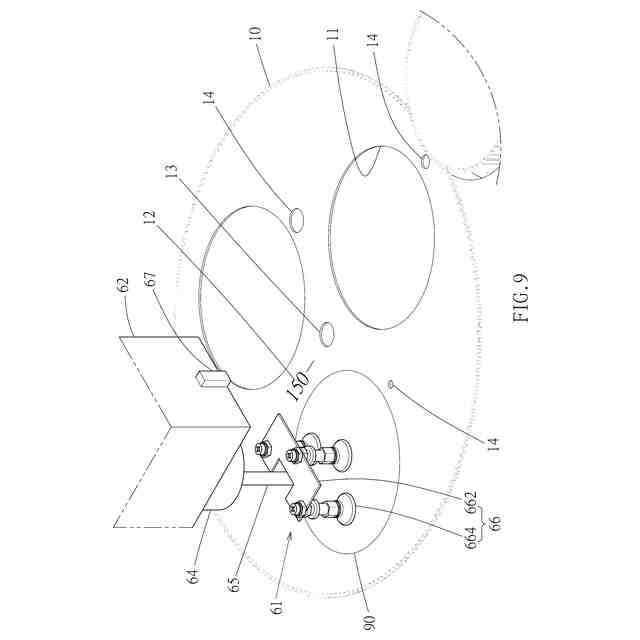
前記駆動装置(20)に間隔をおいて配置される各前記ウェハホルダ(10)には、それぞれウェハ薄板(90)を設置して位置決めするために用いられる複数個の位置決め孔(11)がそれぞれ間隔をおいて貫通形成され、前記研磨装置(30)は、各前記ウェハ薄板(90)を研磨するために用いられ、
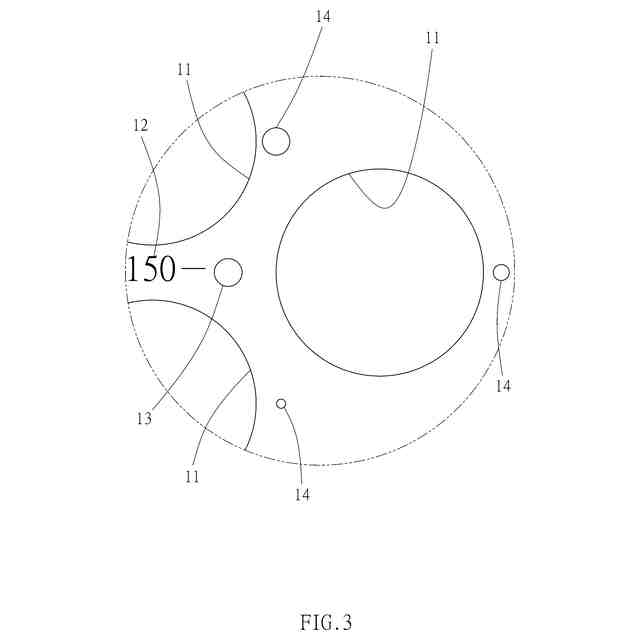
各前記ウェハホルダ(10)には、それぞれ各前記ウェハホルダ(10)を区別して認識するために用いられる識別マーク(12)が形成され、それぞれ各前記位置決め孔(11)の配置中心を認識するために用いられる第1位置決めマーク(13)が形成され、それぞれ各前記位置決め孔(11)にそれぞれ近隣する複数個の孔位置マーク(14)が形成され、各前記孔位置マーク(14)がそれぞれ各前記位置決め孔(11)を区別して認識するために用いられ、
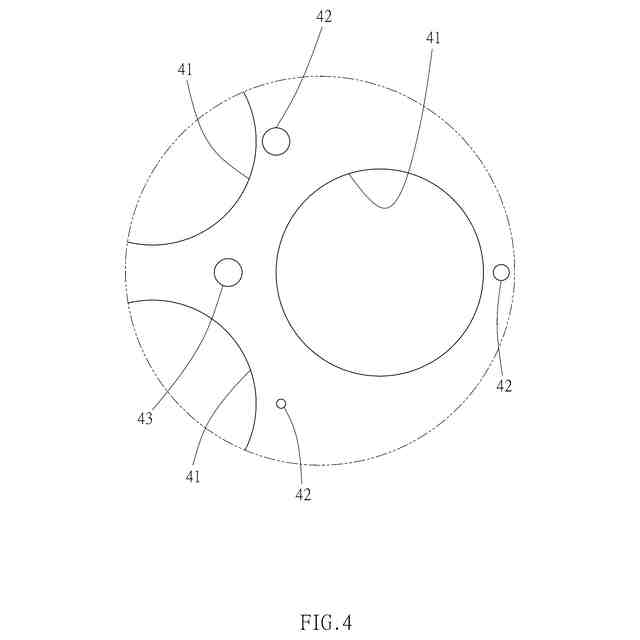
前記前置台(40)には、研磨待ちの前記ウェハ薄板(90)を設置するために用いられる少なくとも1個の第1配置構造(41)が形成され、
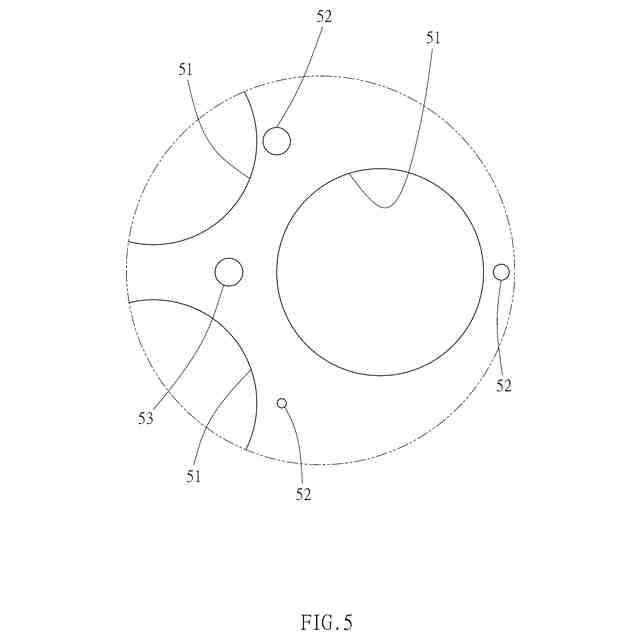
前記後置台(50)には、研磨完了の前記ウェハ薄板(90)を設置するために用いられる少なくとも1個の第2配置構造(51)が形成され、
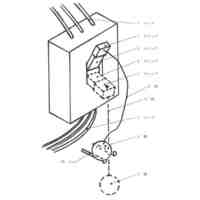
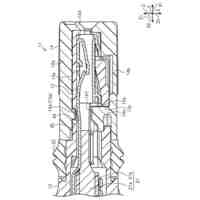
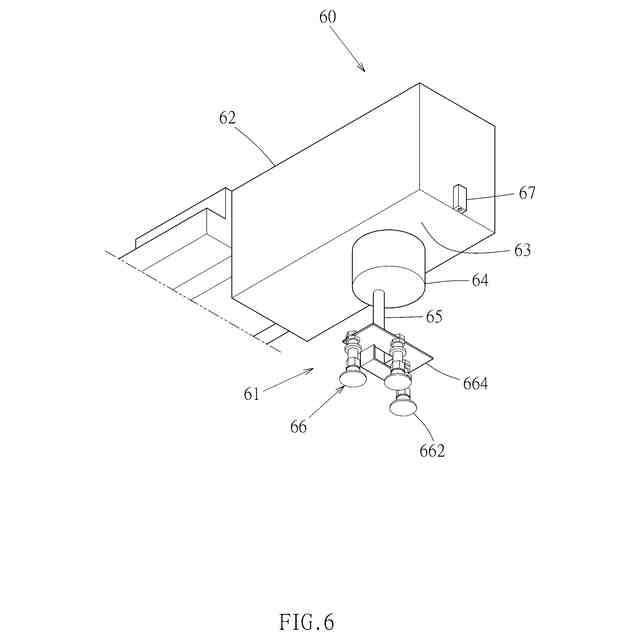
前記移載装置(60)は、ロボットアーム(62)と、前記ロボットアーム(62)の作業端(63)に設置されるピックアンドプレイスユニット(61)とを含み、
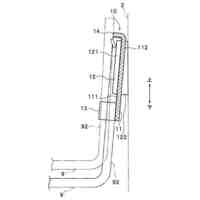
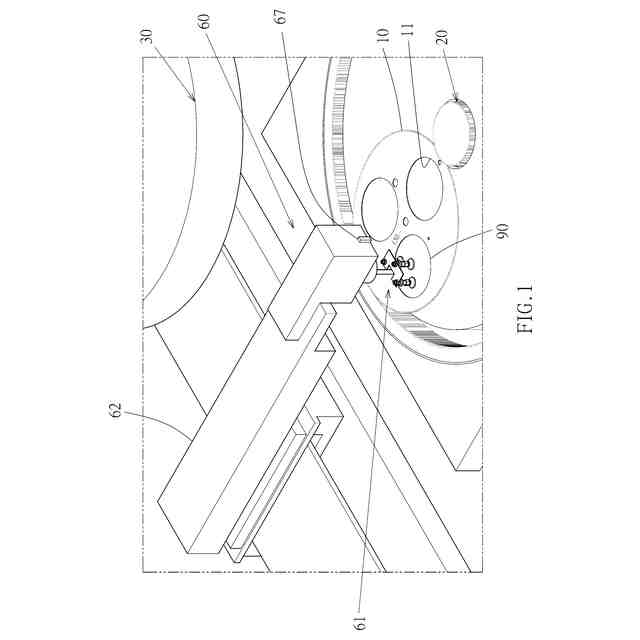
前記ピックアンドプレイスユニット(61)は、前記ロボットアーム(62)と連結される当接座(64)と、前記当接座(64)に連結されるリフター(65)と、前記リフター(65)と連結される吸着チャックモジュール(66)と、影像キャプチャー(67)とを含み、これにより前記リフター(65)が、前記吸着チャックモジュール(66)を上下に昇降させるように制動することで、1個の選定の前記ウェハ薄板(90)に近接したり離間したりし、前記吸着チャックモジュール(66)が前記ウェハ薄板(90)を吸引及び解放するために用いられる少なくとも1つの真空吸着チャック(662)を含み、前記影像キャプチャー(67)が前記当接座(64)に連結され、影像を捕捉するために用いられ、
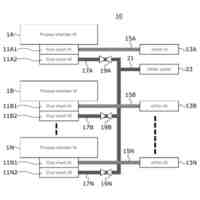
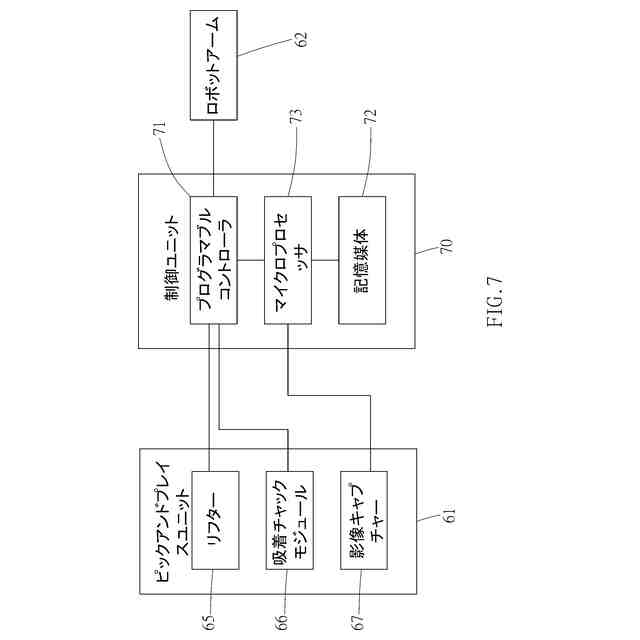
前記制御ユニット(70)は、主に電子回路から構成され、それは、プログラマブルコントローラ(71)と、記憶媒体(72)と、マイクロプロセッサ(73)とを含み、前記プログラマブルコントローラ(71)及び前記記憶媒体(72)がそれぞれ前記マイクロプロセッサ(73)に電気的に連結され、前記プログラマブルコントローラ(71)が前記ピックアンドプレイスユニット(61)及び前記ロボットアーム(62)に電気的に連結され、前記記憶媒体(72)が読み取り及び書き込み可能な記憶媒体であり、各前記ウェハ薄板(90)の研磨記録を記憶するために用いられ、前記マイクロプロセッサ(73)が影像キャプチャー(67)に電気的に連結され、
前記マイクロプロセッサ(73)は、影像認識プログラムを稼働させることにより、前記影像キャプチャー(67)に捕捉される影像を認識すると共に、認識結果に基づいて前記プログラマブルコントローラ(71)を通じて前記ロボットアーム(62)及び前記ピックアンドプレイスユニット(61)を制御するに従って、前記ウェハ薄板(90)の載置又は取出しを行い、前記マイクロプロセッサ(73)はまた、前記ウェハ薄板(90)の個体識別コードと、前記ウェハ薄板(90)を設置する前記識別マーク(12)及び前記孔位置マーク(14)とを結び付けて前記ウェハ薄板(90)に対応する前記研磨記録を生成することを特徴とする、ウェハ研磨設備。
続きを表示(約 2,500 文字)
【請求項2】
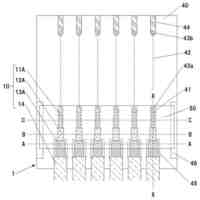
前記前置台(40)には、各前記ウェハホルダ(10)の各前記位置決め孔(11)の数量及び配置関係に合わせて、複数個の前記第1配置構造(41)及び複数個の第1配置マーク(42)が間隔をおいて形成され、各前記第1配置マーク(42)がそれぞれ各前記第1配置構造(41)を区別して認識するために用いられ、前記前置台(40)には、各前記第1配置構造(41)の配置中心を認識するために用いられる第2位置決めマーク(43)が形成され、
前記マイクロプロセッサ(73)は、各前記ウェハ薄板(90)の個体識別コードと、各前記ウェハ薄板(90)を対応設置する前記第1配置マーク(42)、前記識別マーク(12)及び前記孔位置マーク(14)とを結び付けてそれぞれ各前記ウェハ薄板(90)に対応する多数件の前記研磨記録を生成することを特徴とする、請求項1に記載のウェハ研磨設備。
【請求項3】
前記後置台(50)には、各前記ウェハホルダ(10)の各前記位置決め孔(11)の数量及び配置関係に合わせて、複数個の前記第2配置構造(51)が間隔をおいて形成され、前記後置台(50)には、各前記第2配置構造(51)の配置中心を認識するために用いられる第3位置決めマーク(53)が形成されることを特徴とする、請求項1に記載のウェハ研磨設備。
【請求項4】
前記後置台(50)には、それぞれ各前記第2配置構造(51)を区別して認識するために用いられる複数個の第2配置マーク(52)が形成され、
前記マイクロプロセッサ(73)は、各前記ウェハ薄板(90)の個体識別コードと、各前記ウェハ薄板(90)を対応設置する前記識別マーク(12)、前記孔位置マーク(14)及び前記第2配置マーク(52)とを結び付けてそれぞれ各前記ウェハ薄板(90)に対応する多数件の前記研磨記録を生成することを特徴とする、請求項3に記載のウェハ研磨設備。
【請求項5】
請求項1に記載のようなウェハ研磨設備を使用して実行されるウェハ薄板をピックアンドプレイスする方法であって、
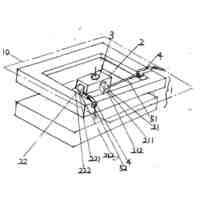
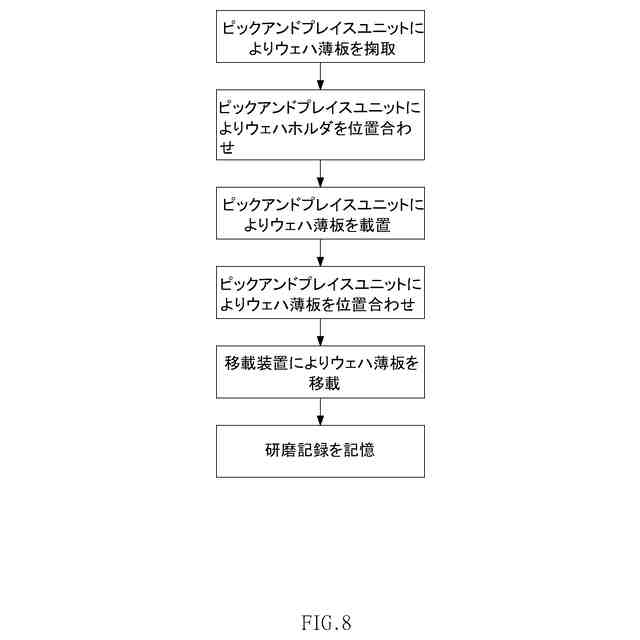
前記ロボットアーム(62)が前記ピックアンドプレイスユニット(61)を前記前置台(40)の上方空間に至るように制動し、前記制御ユニット(70)は、前記影像キャプチャー(67)に捕捉される影像を認識した結果に基づいて、前記移載装置(60)は、前記第1配置構造(41)に予め配置されている研磨待ちの前記ウェハ薄板(90)に相対して位置合わせるために、前記吸着チャックモジュール(66)を校正するように制御し、その後、前記吸着チャックモジュール(66)が前記ウェハ薄板(90)を吸引するように制御する、ピックアンドプレイスユニットによるウェハ薄板を掬い取るステップと、
前記ロボットアーム(62)が前記ピックアンドプレイスユニット(61)を選定の前記ウェハホルダ(10)の上方空間まで移動させるように制動し、前記制御ユニット(70)は、前記影像キャプチャー(67)に捕捉される影像を認識した結果に基づいて、前記第1位置決めマーク(13)を基準として、前記移載装置(60)は、選定の前記位置決め孔(11)に相対して位置合わせるために、前記吸着チャックモジュール(66)を校正するように制御し、前記制御ユニット(70)は、前記ウェハホルダ(10)の前記識別マーク(12)、及び前記ウェハ薄板(90)の対応する前記位置決め孔(11)の前記孔位置マーク(14)を記録する、ピックアンドプレイスユニットによるウェハホルダを位置合わせるステップと、
前記吸着チャックモジュール(66)から解放される前記ウェハ薄板(90)が対応の前記位置決め孔(11)に進入し、これにより前記駆動装置(20)及び前記研磨装置(30)を稼働させることで、前記ウェハ薄板(90)に対する研磨工程を完了させる、ピックアンドプレイスユニットによるウェハ薄板を載置するステップと、
前記研磨工程の完了後、前記ロボットアーム(62)が前記ピックアンドプレイスユニット(61)を選定の前記ウェハホルダ(10)の上方空間まで移動させるように制動し、前記制御ユニット(70)は、前記影像キャプチャー(67)に捕捉される影像を認識した結果に基づいて、前記移載装置(60)は、選定の研磨完了した前記ウェハ薄板(90)に相対して位置合わせるために、前記吸着チャックモジュール(66)を校正するように制御し、かつ前記制御ユニット(70)は、前記ウェハホルダ(10)の前記識別マーク(12)、及び前記ウェハ薄板(90)の対応する前記位置決め孔(11)の前記孔位置マーク(14)を記録する、ピックアンドプレイスユニットによるウェハ薄板を位置合わせるステップと、
前記吸着チャックモジュール(66)が前記ウェハ薄板(90)を吸引し、その後、前記吸着チャックモジュール(66)により前記ウェハホルダ(10)から離間するまで前記ウェハ薄板(90)を上昇させるように連動しており、その後、前記ロボットアーム(62)が前記ピックアンドプレイスユニット(61)を前記後置台(50)の上方まで移動させるように制動し、前記制御ユニット(70)は、前記影像キャプチャー(67)に捕捉される影像を認識した結果に基づいて、前記移載装置(60)は、前記第2配置構造(51)に相対して位置合わせるために、前記吸着チャックモジュール(66)を校正するように制御し、かつ前記ピックアンドプレイスユニット(61)は、前記第2配置構造(51)に対して研磨完了の前記ウェハ薄板(90)を解放する、移載装置によるウェハ薄板を移載するステップと、
前記マイクロプロセッサ(73)により、前記ウェハ薄板(90)の個体識別コードと、前記ウェハ薄板(90)を対応設置する前記識別マーク(12)及び前記孔位置マーク(14)とを結び付けて前記ウェハ薄板(90)に対応する前記研磨記録を生成し、前記記憶媒体(72)により前記研磨記録を記憶する、研磨記録を記憶するステップとを含むことを特徴とする、ウェハ薄板をピックアンドプレイスする方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ウェハ薄板の研磨工程に応用されている設備組立部品に係り、特に、ウェハ研磨設備及びウェハ薄板をピックアンドプレイス(pick and place)する方法に関するものである。
続きを表示(約 4,500 文字)
【背景技術】
【0002】
ウェハ研磨設備は、複数個のウェハホルダと、駆動装置と、研磨装置と、移載装置とを備え、その内、各前記ウェハホルダは、前記駆動装置に間隔をおいて配置され、前記駆動装置は、各前記ウェハホルダをそれぞれ循環稼働させるように駆動し、各前記ウェハホルダには、複数個の位置決め孔がそれぞれ貫通形成され、これによって多数枚のウェハ薄板が設置され、前記研磨装置は、各前記ウェハ薄板に対して研磨加工を遂行し、前記移載装置は、各前記ウェハ薄板をそれぞれ各前記位置決め孔に移載すると共に、研磨工程を完了した後、各前記ウェハ薄板を移載して前記ウェハホルダから取り去る。
【0003】
前記移載装置は、ピックアンドプレイスユニットと、処理ユニットと、ロボットアームとを含み、それは、多数枚のウェハ薄板を逐次にそれぞれ違った前記位置決め孔に設置する。
【0004】
研磨工程の完了後、前記移載装置は、研磨完了の多数枚の前記ウェハ薄板を逐次に移載して取り去る。
【発明の概要】
【発明が解決しようとする課題】
【0005】
1枚の前記ウェハ薄板毎にそれぞれその加工履歴の記録が欠落しており、つまり、前記ウェハ薄板の研磨工程の記録が欠落しており、前記ウェハ薄板の研磨に必要とされる時程の長短を記録するだけでなく、さらに前記ウェハ薄板が位置決めされている所在の前記ウェハホルダ及び前記位置決め孔の記録も行わなければならず、前記移載装置は、各枚の前記ウェハ薄板がそれぞれ移載されて位置決めされている前記ウェハホルダ及び前記位置決め孔を認識することができず、各前記ウェハ薄板の加工履歴の追跡に不利である。
【課題を解決するための手段】
【0006】
本発明は、ウェハ研磨設備及びウェハ薄板をピックアンドプレイスする方法を提供することを主な目的とする。
【0007】
前述の目的を達成するために、本発明では、以下の技術方案を採用し、
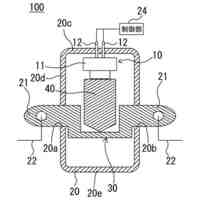
複数個のウェハホルダ10と、駆動装置20と、研磨装置30と、前置台40と、後置台50と、移載装置60と、制御ユニット70とを備えるウェハ研磨設備であって、
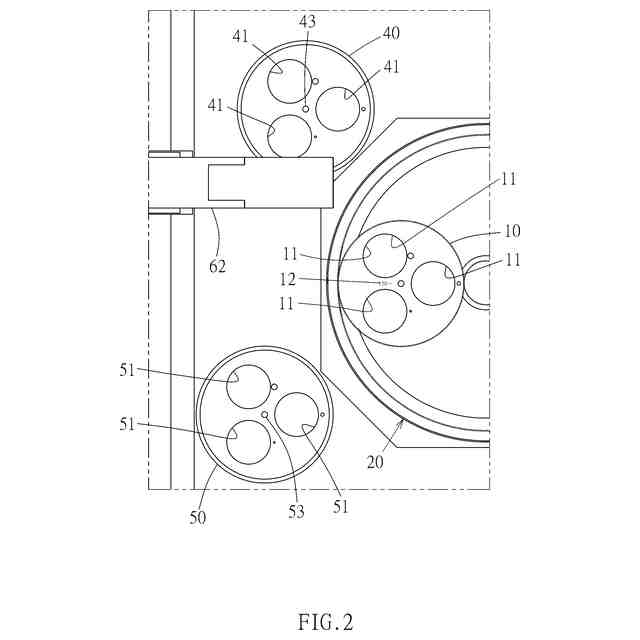
前記駆動装置20に間隔をおいて配置される各前記ウェハホルダ10には、それぞれウェハ薄板90を設置して位置決めするために用いられる複数個の位置決め孔11がそれぞれ間隔をおいて貫通形成され、前記研磨装置30は、各前記ウェハ薄板90を研磨するために用いられ、
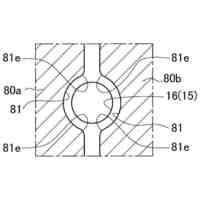
各前記ウェハホルダ10には、それぞれ各前記ウェハホルダ10を区別して認識するために用いられる識別マーク12が形成され、それぞれ各前記位置決め孔11の配置中心を認識するために用いられる第1位置決めマーク13が形成され、それぞれ各前記位置決め孔11にそれぞれ近隣する複数個の孔位置マーク14が形成され、各前記孔位置マーク14がそれぞれ各前記位置決め孔11を区別して認識するために用いられ、
前記前置台40には、研磨待ちの前記ウェハ薄板90を設置するために用いられる少なくとも1個の第1配置構造41が形成され、
前記後置台50には、研磨完了の前記ウェハ薄板90を設置するために用いられる少なくとも1個の第2配置構造51が形成され、
前記移載装置60は、ロボットアーム62と、前記ロボットアーム62の作業端63に設置されるピックアンドプレイスユニット61とを含み、
前記ピックアンドプレイスユニット61は、前記ロボットアーム62と連結される当接座64と、前記当接座64に連結されるリフター65と、前記リフター65と連結される吸着チャックモジュール66と、影像キャプチャー67とを含み、これにより前記リフター65が、前記吸着チャックモジュール66を上下に昇降させるように制動することで、1個の選定の前記ウェハ薄板90に近接したり離間したりし、前記吸着チャックモジュール66が前記ウェハ薄板90を吸引及び解放(釈放)するために用いられる少なくとも1つの真空吸着チャック662を含み、前記影像キャプチャー67が前記当接座64に連結され、影像を捕捉するために用いられ、
前記制御ユニット70は、主に電子回路から構成され、それは、プログラマブルコントローラ71と、記憶媒体72と、マイクロプロセッサ73とを含み、前記プログラマブルコントローラ71及び前記記憶媒体72がそれぞれ前記マイクロプロセッサ73に電気的に連結され、前記プログラマブルコントローラ71が前記ピックアンドプレイスユニット61及び前記ロボットアーム62に電気的に連結され、前記記憶媒体72が読み取り及び書き込み可能な記憶媒体であり、各前記ウェハ薄板90の研磨記録を記憶するために用いられ、前記マイクロプロセッサ73が影像キャプチャー67に電気的に連結され、
前記マイクロプロセッサ73は、影像認識プログラムを稼働させることにより、前記影像キャプチャー67に捕捉される影像を認識すると共に、認識結果に基づいて前記プログラマブルコントローラ71を通じて前記ロボットアーム62及び前記ピックアンドプレイスユニット61を制御するに従って、前記ウェハ薄板90の載置又は取出しを行い、前記マイクロプロセッサ73はまた、前記ウェハ薄板90の個体識別コードと、前記ウェハ薄板90を設置する前記識別マーク12及び前記孔位置マーク14とを結び付けて前記ウェハ薄板90に対応する前記研磨記録を生成することを特徴とする、ウェハ研磨設備。
【0008】
かかるウェハ薄板をピックアンドプレイスする方法は、前述のようなウェハ研磨設備を使用して実行され、それは下記のステップを含み、即ち、
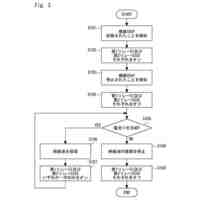
前記ロボットアーム62が前記ピックアンドプレイスユニット61を前記前置台40の上方(上部)空間に至るように制動し、前記制御ユニット70は、前記影像キャプチャー67に捕捉される影像を認識した結果に基づいて、前記移載装置60は、前記第1配置構造41に予め配置されている研磨待ちの前記ウェハ薄板90に相対して位置合わせるために、前記吸着チャックモジュール66を校正するように制御し、その後、前記吸着チャックモジュール66が前記ウェハ薄板90を吸引するように制御する、ピックアンドプレイスユニットによるウェハ薄板を掬い取るステップと、
前記ロボットアーム62が前記ピックアンドプレイスユニット61を選定の前記ウェハホルダ10の上方(上部)空間まで移動させるように制動し、前記制御ユニット70は、前記影像キャプチャー67に捕捉される影像を認識した結果に基づいて、前記第1位置決めマーク13を基準として、前記移載装置60は、選定の前記位置決め孔11に相対して位置合わせるために、前記吸着チャックモジュール66を校正するように制御し、前記制御ユニット70は、前記ウェハホルダ10の前記識別マーク12、及び前記ウェハ薄板90の対応する前記位置決め孔11の前記孔位置マーク14を記録する、ピックアンドプレイスユニットによるウェハホルダを位置合わせるステップと、
前記吸着チャックモジュール66から解放(釈放)される前記ウェハ薄板90が対応の前記位置決め孔11に進入し、これにより前記駆動装置20及び前記研磨装置30を稼働させることで、前記ウェハ薄板90に対する研磨工程を完了させる、ピックアンドプレイスユニットによるウェハ薄板を載置するステップと、
前記研磨工程の完了後、前記ロボットアーム62が前記ピックアンドプレイスユニット61を選定の前記ウェハホルダ10の上方(上部)空間まで移動させるように制動し、前記制御ユニット70は、前記影像キャプチャー67に捕捉される影像を認識した結果に基づいて、前記移載装置60は、選定の研磨完了した前記ウェハ薄板90に相対して位置合わせるために、前記吸着チャックモジュール66を校正するように制御し、かつ前記制御ユニット70は、前記ウェハホルダ10の前記識別マーク12、及び前記ウェハ薄板90の対応する前記位置決め孔11の前記孔位置マーク14を記録する、ピックアンドプレイスユニットによるウェハ薄板を位置合わせるステップと、
前記吸着チャックモジュール66が前記ウェハ薄板90を吸引し、その後、前記吸着チャックモジュール66により前記ウェハホルダ10から離間するまで前記ウェハ薄板90を上昇させるように連動しており、その後、前記ロボットアーム62が前記ピックアンドプレイスユニット61を前記後置台50の上方まで移動させるように制動し、前記制御ユニット70は、前記影像キャプチャー67に捕捉される影像を認識した結果に基づいて、前記移載装置60は、前記第2配置構造51に相対して位置合わせるために、前記吸着チャックモジュール66を校正するように制御し、かつ前記ピックアンドプレイスユニット61は、前記第2配置構造51に対して研磨完了の前記ウェハ薄板90を解放(釈放)する、移載装置によるウェハ薄板を移載するステップと、
前記マイクロプロセッサ73により、前記ウェハ薄板90の個体識別コードと、前記ウェハ薄板90を対応設置する前記識別マーク12及び前記孔位置マーク14とを結び付けて前記ウェハ薄板90に対応する前記研磨記録を生成し、前記記憶媒体72により前記研磨記録を記憶する、研磨記録を記憶するステップとを含むことを特徴とする、ウェハ薄板をピックアンドプレイスする方法。
【発明の効果】
【0009】
本発明によれば、1枚の前記ウェハ薄板毎が載置されている前記ウェハホルダの前記識別マーク、及び前記位置決め孔に対応する前記孔位置マークを記録することが可能であり、前記ウェハ薄板の個体識別コードと結合するように結び付けられることに合わせて前記研磨記録を生成し、各前記ウェハ薄板の加工履歴を有利に追跡し得る。
【図面の簡単な説明】
【0010】
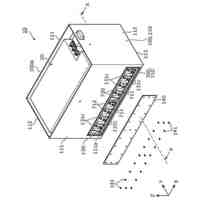
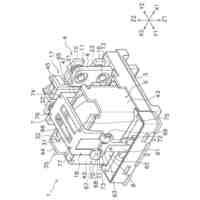
本発明の実施例1のウェハ研磨設備の一部構成を示す斜視図である。
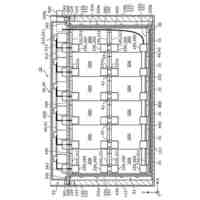
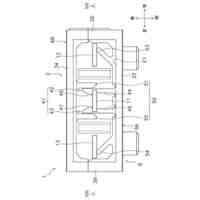
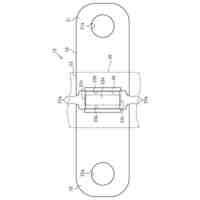
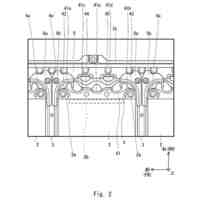
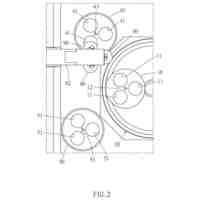
本発明の実施例1のウェハ研磨設備の一部上面図である。
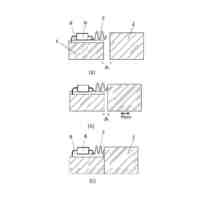
図2の一部拡大図である。
図2の一部拡大図である。
図2の一部拡大図である。
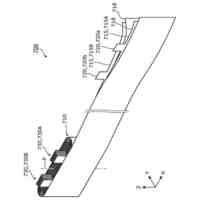
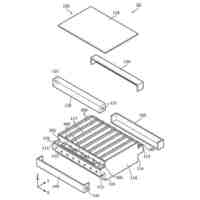
本発明の実施例1のウェハ研磨設備の一部斜視図である。
本発明の実施例1の移載装置の回路ブロック図である。
本発明の実施例1に係るウェハ薄板をピックアンドプレイスする方法のフローチャートである。
本発明の実施例1のウェハ研磨設備におけるウェハ薄板のウェハホルダへの載置を示す斜視図である。
本発明の実施例2のウェハ研磨設備の一部構成を示す斜視図である。
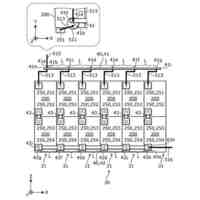
本発明の実施例3のウェハホルダの一部拡大上面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
準力機械股分有限公司
ウェハ研磨設備及びウェハ薄板をピックアンドプレイスする方法
5日前
準力機械股分有限公司
ウェハ研磨設備及び多数枚のウェハ薄板をピックアンドプレイスする方法
5日前
個人
後付地震遮断機
3日前
個人
超精密位置決め機構
4日前
東レ株式会社
積層多孔質膜
7日前
株式会社潤工社
同軸ケーブル
1か月前
株式会社ExH
電流開閉装置
1か月前
CKD株式会社
巻回装置
6日前
個人
鉄心用材料とその製造方法
1か月前
エイブリック株式会社
半導体装置
1か月前
個人
マルチバンドコイルアンテナ
19日前
矢崎総業株式会社
電線
14日前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電素子
13日前
株式会社GSユアサ
蓄電装置
10日前
株式会社大阪ソーダ
複合固体電解質
13日前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
オムロン株式会社
電磁継電器
1か月前
日本化薬株式会社
電流遮断装置
4日前
オムロン株式会社
スイッチ装置
1か月前
日本特殊陶業株式会社
保持装置
11日前
株式会社ダイヘン
変圧器
25日前
日本特殊陶業株式会社
保持装置
6日前
トヨタ自動車株式会社
電源装置
1か月前
日星電気株式会社
ケーブルアセンブリ
1か月前
住友電装株式会社
端子台
1か月前
ダイハツ工業株式会社
固定治具
13日前
住友電装株式会社
コネクタ
1か月前
エドワーズ株式会社
冷却システム
1か月前
トヨタ自動車株式会社
電池パック
1か月前
トヨタ自動車株式会社
電池パック
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ