TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025108467
公報種別
公開特許公報(A)
公開日
2025-07-23
出願番号
2025060202,2022505392
出願日
2025-04-01,2020-07-21
発明の名称
自動ウェハーハンドリングロボットの教育及びヘルスチェックのための統合化された適応型位置決めシステム及びルーチン
出願人
ラム リサーチ コーポレーション
,
LAM RESEARCH CORPORATION
代理人
弁理士法人明成国際特許事務所
主分類
H01L
21/677 20060101AFI20250715BHJP(基本的電気素子)
要約
【課題】半導体処理ツールのウェハーステーションのウェハー支持体にウェハーを提供するための複数のタイプのオフセットを決定及び使用するためのシステム並びに方法を提供する
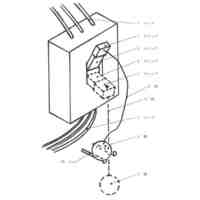
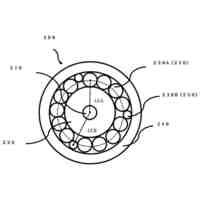
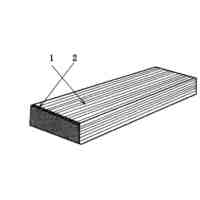
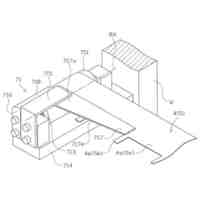
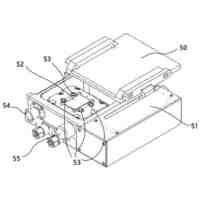
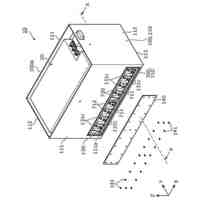
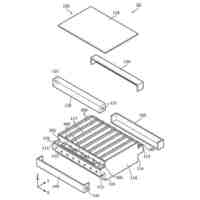
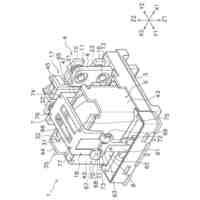
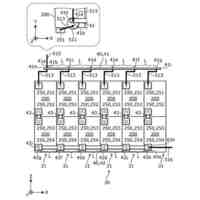
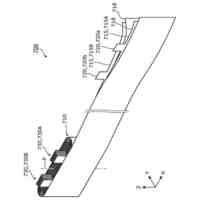
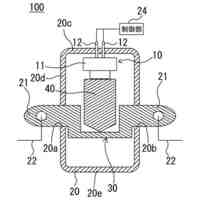
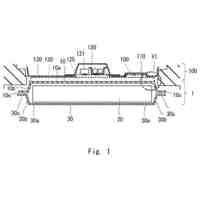
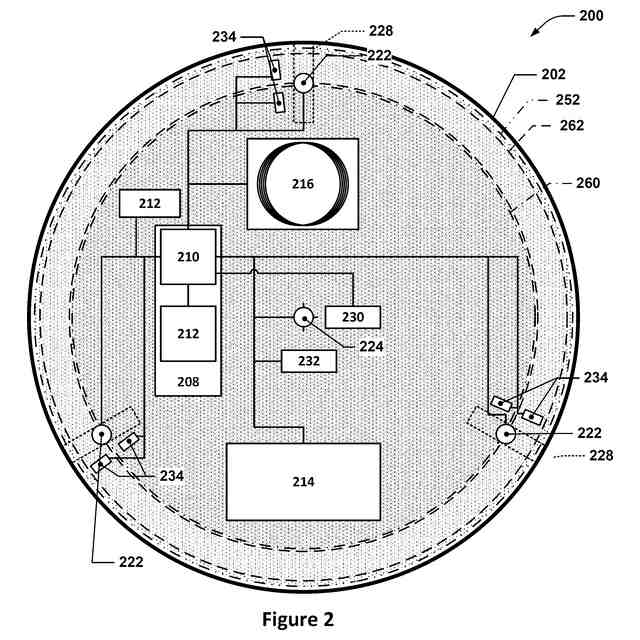
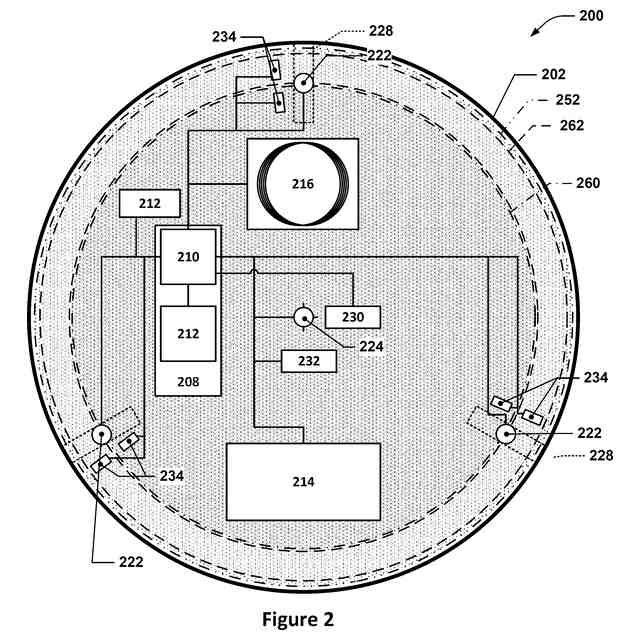
【解決手段】アクティブウェハーセンタリング(AWC)システムは、自動較正ウェハーを使用する。自動較正ウェハー200は、エッジに位置する複数の画像センサ222を含む複数のセンサ(画像センサ222、224、振動センサ230、方位/傾斜センサ232、近接センサ234など)を含んでよく、画像センサは、選択されたウェハーステーション内に位置する2つの異なる構造体に関連付けられた基準部分を画像化するために使用される。
【選択図】図2
特許請求の範囲
【請求項1】
半導体処理ツール用のウェハーハンドリングロボットの較正を支援するシステムであって、前記システムは、
自動較正ウェハーを含み、前記自動較正ウェハーは、
前記ウェハーハンドリングロボットにより運ばれるように寸法決めされた基板であって、前記基板が前記ウェハーハンドリングロボットにより運ばれるときに前記ウェハーハンドリングロボットのエンドエフェクタに接触するように構成されている第1の面を有する、基板と、
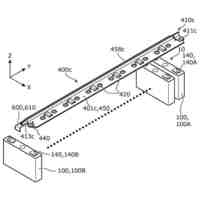
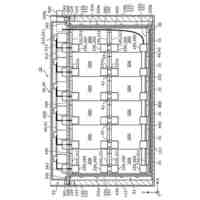
前記基板により支持され、前記基板の共通点からオフセットされた場所に位置決めされた複数の第1の画像センサであって、前記基板が前記第1の面を下向きに向けられたときに、前記第1の画像センサの各々が下向きの視野を有する、複数の第1の画像センサと、
前記第1の画像センサの各々に通信可能に接続されている第1のコントローラと、を含むシステム。
続きを表示(約 940 文字)
【請求項2】
請求項1に記載のシステムであって、前記第1の画像センサは、前記共通点の周りに円形アレイで構成されている、システム。
【請求項3】
請求項1に記載のシステムであって、前記基板は名目上は円形であり、前記半導体処理ツールが処理するように構成されている半導体ウェハーと同じ直径を有する、システム。
【請求項4】
請求項1に記載のシステムであって、前記基板は名目上は円形であり、前記半導体処理ツールが使用するように構成されているエッジリングと同じ直径を有する、システム。
【請求項5】
請求項1に記載のシステムであって、前記基板は名目上は円形であり、前記半導体処理ツールが使用するように構成されているエッジリングの外径と内径との間の直径を有する、システム。
【請求項6】
請求項1に記載のシステムであって、前記基板は名目上は円形であり、前記半導体処理ツールが使用するように構成されているエッジリングの外径と内径との間の平均の±10%以内の直径を有する、システム。
【請求項7】
請求項1に記載のシステムであって、前記基板は、200mm、300mm、及び450mmからなる群から選択される直径を有する名目上は円形のディスクである、システム。
【請求項8】
請求項1に記載のシステムであって、前記自動較正ウェハーは、少なくとも前記第1のコントローラ及び前記第1の画像センサに電力を供給するように構成されている電源を更に含む、システム。
【請求項9】
請求項8に記載のシステムであって、
前記電源は再充電可能電池であり、
前記自動較正ウェハーは、電磁場とインターフェースしたときに前記再充電可能電池を充電するように構成されている無線充電機能を更に含む、システム。
【請求項10】
請求項1に記載のシステムであって、
前記自動較正ウェハーは、第1の無線通信インターフェースを更に含み、
前記第1の無線通信インターフェースは、前記第1のコントローラに通信可能に接続されている、システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【背景技術】
【0001】
[関連出願データ]
本出願の一部として、PCT願書が本明細書と同時に提出される。同時に提出されたPCT願書において確認したように、本出願が利益または優先権を主張する出願の各々が、その全体があらゆる目的のために参照により本明細書に組み込まれる。
続きを表示(約 1,500 文字)
【0002】
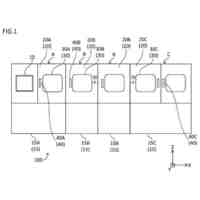
半導体処理ツールは、ウェハーハンドリングロボットを利用して、様々なウェハーステーション間で半導体ウェハーを移動させる。ウェハーハンドリングロボットは典型的には、ブレードタイプ又はスパチュラタイプのエンドエフェクタを使用して半導体ウェハーを下方からピックアップし、半導体ウェハーはウェハーハンドリングロボットのエンドエフェクタに確実に固定されているわけではないので、エンドエフェクタとその上に配置された半導体ウェハーとの間には、多くの場合に相対的な位置決めに多少のばらつきがある。半導体処理作業の敏感性に起因して、ウェハーハンドリングロボットを使用して半導体ウェハーを配置する場合、そのような変動を補正して、半導体ウェハーが、対応する処理ステーション内において、許容公差の範囲内で所望の場所に、例えば通常は処理ステーション内にセンタリングされて配置されるようにすることが典型的である。最新の半導体処理ツールは、アクティブウェハーセンタリング(AWC)システムを利用して、このようなウェハー配置を支援する。
【発明の概要】
【0003】
本明細書に記載される主題の1つ以上の実現形態の詳細が、添付の図面及び以下の記載に記述されている。他の特徴、態様、及び利点が、本明細書の記載、図面、及び特許請求の範囲から明らかになるであろう。以下の非限定的な実現形態は、本開示の一部と見なされる。他の実現形態が、本開示及び添付図面の全体から明らかとなるであろう。
【0004】
いくつかの実現形態では、半導体処理ツール用のウェハーハンドリングロボットの較正を支援するシステムが提供され得る。本システムは、例えば、自動較正ウェハーを含んでよく、自動較正ウェハーは、ウェハーハンドリングロボットにより運ばれるように寸法決めされた基板であって、ウェハーハンドリングロボットによって運ばれるときにウェハーハンドリングロボットのエンドエフェクタに接触するように構成されている第1の面を有する、基板、と、基板により支持され、基板の共通点からオフセットされた場所に位置決めされた複数の第1の画像センサであって、基板が第1の面を下向きに向けられたときに、第1の画像センサの各々が下向きの視野を有する、複数の第1の画像センサと、第1の画像センサの各々に通信可能に接続されている第1のコントローラと、を含む。
【0005】
システムのいくつかの実現形態では、第1の画像センサは、共通点の周りに円形アレイで構成されてよい。
【0006】
システムのいくつかの実現形態では、基板は名目上は円形であってよく、半導体処理ツールが処理するように構成されている半導体ウェハーと同じ直径を有してよい。
【0007】
システムのいくつかの実現形態では、基板は名目上は円形であってよく、半導体処理ツールが使用するように構成されているエッジリングと同じ直径を有してよい。
【0008】
システムのいくつかの実現形態では、基板は名目上は円形であってよく、半導体処理ツールが使用するように構成されているエッジリングの外径と内径との間の直径を有してよい。
【0009】
システムのいくつかの実現形態では、基板は名目上は円形であってよく、半導体処理ツールが使用するように構成されているエッジリングの外径と内径との間の平均の±10%以内の直径を有してよい。
【0010】
システムのいくつかの実現形態では、基板は、200mm、300mm、及び450mmからなる群から選択される直径を有する名目上は円形のディスクであってよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
後付地震遮断機
3日前
個人
超精密位置決め機構
4日前
東レ株式会社
積層多孔質膜
7日前
株式会社潤工社
同軸ケーブル
1か月前
株式会社ExH
電流開閉装置
1か月前
個人
鉄心用材料とその製造方法
1か月前
CKD株式会社
巻回装置
6日前
エイブリック株式会社
半導体装置
1か月前
個人
マルチバンドコイルアンテナ
19日前
株式会社メルビル
ステージ
1か月前
株式会社GSユアサ
蓄電装置
10日前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
オムロン株式会社
電磁継電器
1か月前
株式会社GSユアサ
蓄電装置
1か月前
矢崎総業株式会社
電線
14日前
株式会社大阪ソーダ
複合固体電解質
13日前
株式会社GSユアサ
蓄電素子
13日前
株式会社GSユアサ
蓄電装置
1か月前
日本化薬株式会社
電流遮断装置
4日前
ダイハツ工業株式会社
固定治具
13日前
住友電装株式会社
端子台
1か月前
オムロン株式会社
スイッチ装置
1か月前
トヨタ自動車株式会社
電源装置
1か月前
日本特殊陶業株式会社
保持装置
11日前
日星電気株式会社
ケーブルアセンブリ
1か月前
株式会社ダイヘン
変圧器
25日前
日本特殊陶業株式会社
保持装置
6日前
TOWA株式会社
製造装置
11日前
トヨタ自動車株式会社
電池パック
1か月前
東洋電装株式会社
操作装置
1か月前
個人
“hi-light surf.”
12日前
中国電力株式会社
断路器操作構造
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ