TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025107830
公報種別
公開特許公報(A)
公開日
2025-07-22
出願番号
2024001311
出願日
2024-01-09
発明の名称
解析装置、解析方法、及びプログラム
出願人
国立研究開発法人農業・食品産業技術総合研究機構
代理人
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20250714BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】地面の影響を考慮したロボットのシミュレーション環境を作り上げることで、より好適にロボットを設計することができる解析装置、解析方法、及びプログラムを提供すること。
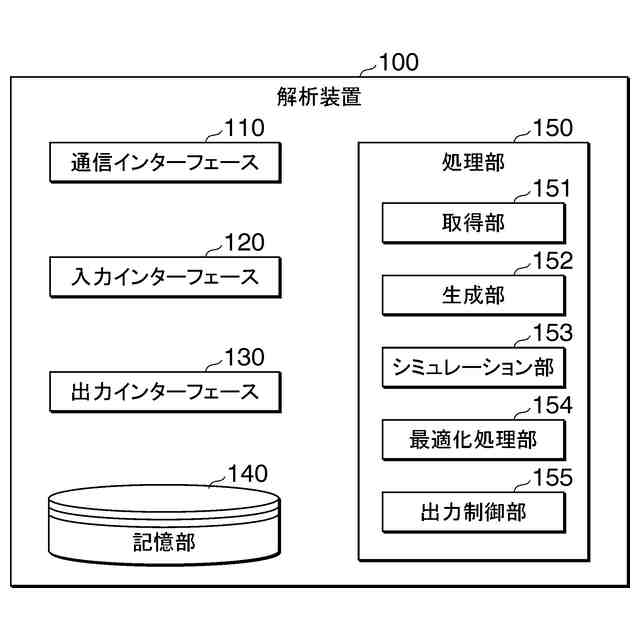
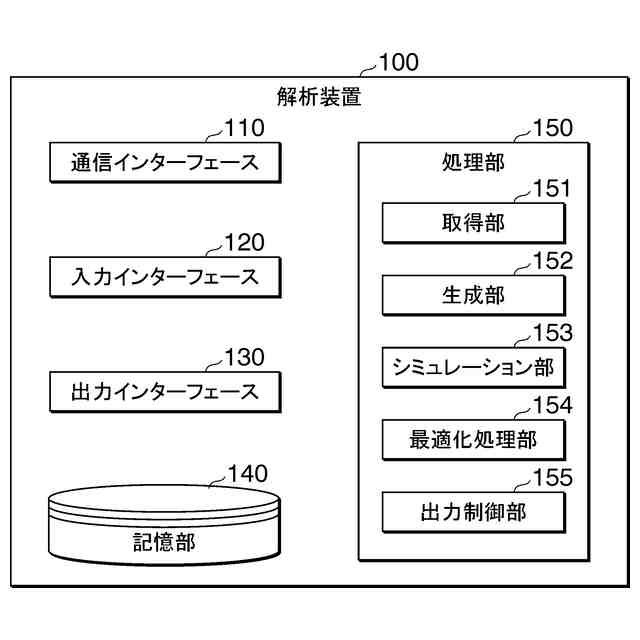
【解決手段】解析装置は、上空から撮像されたロボットの作業場の画像を取得する取得部と、前記画像から、前記作業場の仮想モデルであり、三次元の点群によって表される作業場モデルを生成する生成部と、前記作業場モデル上において、前記ロボットの仮想モデルであるロボットモデルを動作させたときの前記ロボットモデルの挙動をシミュレーションによって計算するシミュレーション部と、前記ロボットモデルの挙動を示す仮想挙動データに基づいて、ロボットパラメータと地表パラメータとを最適化する最適化処理部と、を備える。
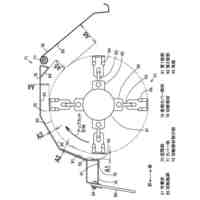
【選択図】図1
特許請求の範囲
【請求項1】
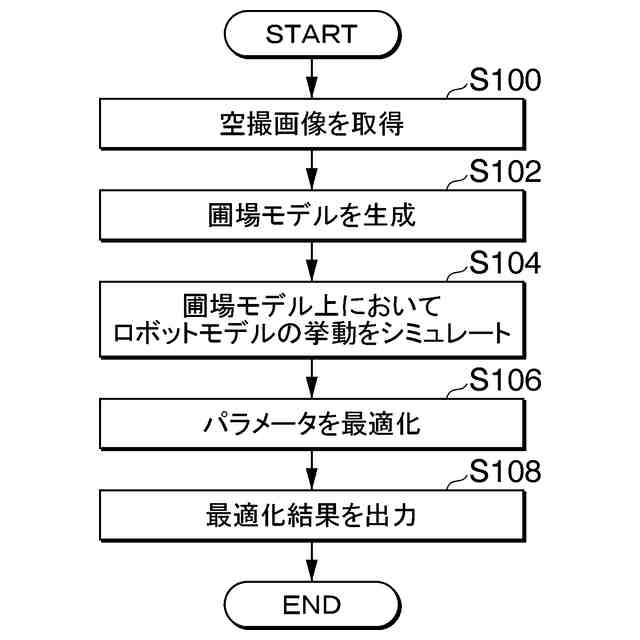
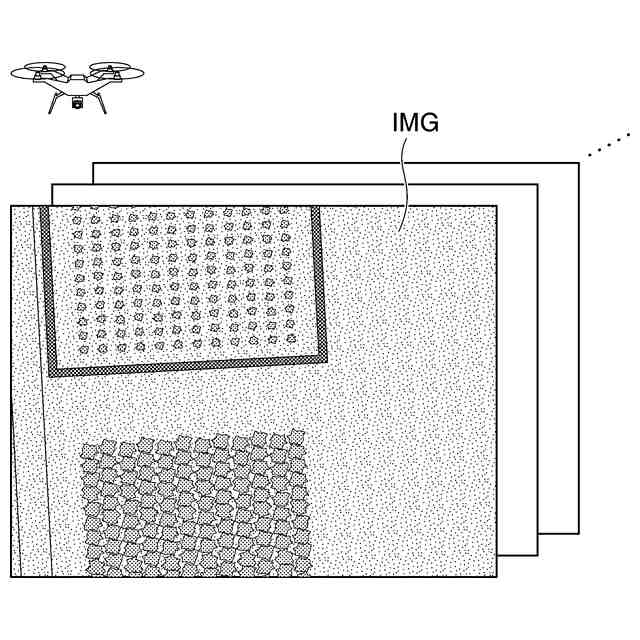
上空から撮像されたロボットの作業場の画像を取得する取得部と、
前記画像から、前記作業場の仮想モデルであり、三次元の点群によって表される作業場モデルを生成する生成部と、
前記作業場モデル上において、前記ロボットの仮想モデルであるロボットモデルを動作させたときの前記ロボットモデルの挙動をシミュレーションによって計算するシミュレーション部と、
前記ロボットモデルの挙動を示すデータである仮想挙動データに基づいて、前記ロボットモデルの設計及び制御に関するパラメータであるロボットパラメータと、前記作業場モデルの地表面に関するパラメータである地表パラメータとを最適化する最適化処理部と、
を備える解析装置。
続きを表示(約 1,500 文字)
【請求項2】
前記取得部は、前記作業場において前記ロボットを動作させたときの前記ロボットの挙動を示すデータである実挙動データを取得し、
前記シミュレーション部は、固定された前記ロボットパラメータを有する前記ロボットモデルを動作させる前記シミュレーションを、前記作業場モデルの前記地表パラメータを変更しながら繰り返すことで、前記作業場モデルの前記地表パラメータが互いに異なる複数の前記仮想挙動データを生成し、
前記最適化処理部は、複数の前記仮想挙動データのそれぞれと前記実挙動データとの差分に基づいて、前記作業場の前記地表パラメータを推定する、
請求項1に記載の解析装置。
【請求項3】
前記シミュレーション部は、前記ロボットパラメータと前記地表パラメータとを変更しながら前記シミュレーションを繰り返すことで、前記地表パラメータが互いに異なる複数の前記仮想挙動データを前記ロボットパラメータごとに生成し、
前記最適化処理部は、前記ロボットパラメータごとに生成された複数の前記仮想挙動データに基づいて、複数の前記地表パラメータに対してロバストな前記ロボットパラメータを決定する、
請求項1又は2に記載の解析装置。
【請求項4】
前記シミュレーション部は、前記シミュレーションにおいて、前記ロボットモデル全体による前記作業場モデルの地表への接触力を前記挙動として計算する、
請求項1又は2に記載の解析装置。
【請求項5】
前記ロボットモデルは、メッシュモデルで表され、
前記シミュレーション部は、
前記三次元の点群によって表される前記作業場モデルの各点が前記ロボットモデルのメッシュに侵入する際の距離及び速度に基づいて、各点における前記メッシュへの接触力を計算し、
前記各点における接触力を前記点群で積分することで、前記ロボットモデル全体による前記作業場モデルの地表への接触力を計算する、
請求項4に記載の解析装置。
【請求項6】
コンピュータを用いた解析方法であって、
上空から撮像されたロボットの作業場の画像を取得すること、
前記画像から、前記作業場の仮想モデルであり、三次元の点群によって表される作業場モデルを生成すること、
前記作業場モデル上において、前記ロボットの仮想モデルであるロボットモデルを動作させたときの前記ロボットモデルの挙動をシミュレーションによって計算すること、
前記ロボットモデルの挙動を示すデータである仮想挙動データに基づいて、前記ロボットモデルの設計及び制御に関するパラメータであるロボットパラメータと、前記作業場モデルの地表面に関するパラメータである地表パラメータとを最適化すること、
を含む解析方法。
【請求項7】
コンピュータに実行させるためのプログラムであって、
上空から撮像されたロボットの作業場の画像を取得すること、
前記画像から、前記作業場の仮想モデルであり、三次元の点群によって表される作業場モデルを生成すること、
前記作業場モデル上において、前記ロボットの仮想モデルであるロボットモデルを動作させたときの前記ロボットモデルの挙動をシミュレーションによって計算すること、
前記ロボットモデルの挙動を示すデータである仮想挙動データに基づいて、前記ロボットモデルの設計及び制御に関するパラメータであるロボットパラメータと、前記作業場モデルの地表面に関するパラメータである地表パラメータとを最適化すること、
を含むプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、解析装置、解析方法、及びプログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
農業における労働力が不足する中、人手で対応せざるを得ない作業をロボットに代替させることが求められている。特に小型ロボットは、トラクタでは作業が難しい生育後期の圃場でも移動でき、ドローンには難しい運搬や土壌測定といった力を必要とする作業にも利用可能な利点がある。
【0003】
圃場などでロボットに作業させる場合、ロボットが地面からの影響(例えば、地面の凹凸や硬さなど)を受けやすい。特にロボットが小型であるほど地面から顕著に影響を受けやすい。そのため、様々な地面パターンに対応するようロボットを設計する必要がある。ロボットを設計するために、現実世界において、設計、開発、圃場における実証実験を何度も繰り返すことが考えられるが、開発コストが高すぎるため、シミュレーションを用いて仮想世界でのロボットの設計を最適化することが好ましい。
【0004】
圃場で作業させるロボットや圃場そのものに関するシミュレーション技術として、例えば、非特許文献1-2に記載の技術が知られている。
【先行技術文献】
【非特許文献】
【0005】
Shamshiri et al. 2018, Simulation software and virtual environments for acceleration of agricultural robotics: Features highlights and performance comparison. Int J Agric & Biol Eng, vol.11, no.4, 15-31.
Mortensen et al. 2018, Segmentation of lettuce in coloured 3D point clouds for fresh weight estimation. Computers and Electronics in Agriculture, vol.154, 373-381.
【発明の概要】
【発明が解決しようとする課題】
【0006】
非特許文献1は、圃場ロボットのシミュレーションシステムを開示している。このシミュレーションシステムには、圃場のモデルとして、軽量なメッシュモデルが採用されている。非特許文献2は、複数の静止画像から三角測量の原理で、圃場と作物の三次元点群を生成することを開示している。
【0007】
しかしながら、これら従来の技術では、圃場の地面の凹凸や硬さといった種々のパラメータを適切に決定できておらず、圃場の様々な地面パターンに対応するようロボットを設計することが十分にできていなかった。また、このような課題は、圃場だけに限られず、砂利やアスファルトなどが敷設された道路や、圃場周辺の舗装されていない草地(雑草が生い茂った地面)などにも共通するところである。
【0008】
本発明は、このような事情を考慮してなされたものであり、地面の影響を考慮したロボットのシミュレーション環境を作り上げることで、より好適にロボットを設計することができる解析装置、解析方法、及びプログラムを提供することを目的の一つとする。
【課題を解決するための手段】
【0009】
本発明の一態様は、上空から撮像されたロボットの作業場の画像を取得する取得部と、前記画像から、前記作業場の仮想モデルであり、三次元の点群によって表される作業場モデルを生成する生成部と、前記作業場モデル上において、前記ロボットの仮想モデルであるロボットモデルを動作させたときの前記ロボットモデルの挙動をシミュレーションによって計算するシミュレーション部と、前記ロボットモデルの挙動を示すデータである仮想挙動データに基づいて、前記ロボットモデルの設計及び制御に関するパラメータであるロボットパラメータと、前記作業場モデルの地表面に関するパラメータである地表パラメータと、を最適化する最適化処理部と、を備える解析装置である。
【0010】
本発明の他の態様は、コンピュータを用いた解析方法である。解析方法には、上空から撮像されたロボットの作業場の画像を取得すること、前記画像から、前記作業場の仮想モデルであり、三次元の点群によって表される作業場モデルを生成すること、前記作業場モデル上において、前記ロボットの仮想モデルであるロボットモデルを動作させたときの前記ロボットモデルの挙動をシミュレーションによって計算すること、前記ロボットモデルの挙動を示すデータである仮想挙動データに基づいて、前記ロボットモデルの設計及び制御に関するパラメータであるロボットパラメータと、前記作業場モデルの地表面に関するパラメータである地表パラメータと、を最適化すること、が含まれる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ルアー
6日前
個人
播種装置
3日前
個人
釣り用ルアー
1か月前
個人
釣り用ルアー
1か月前
個人
プランターセット
10日前
個人
生命力近親交配方法
10日前
個人
獣捕獲罠装置
13日前
井関農機株式会社
作業車両
1か月前
株式会社シマノ
釣竿
17日前
株式会社アテックス
草刈機
18日前
個人
ペット用オムツカバー
17日前
井関農機株式会社
圃場作業機
1か月前
井関農機株式会社
歩行型管理機
1か月前
個人
植物栽培装置
19日前
株式会社シマノ
釣竿
1か月前
個人
漁業支援装置及び方法
4日前
株式会社フルトン
水中捕捉装置
18日前
株式会社村岡水産
釣り用ワーム
1か月前
松山株式会社
草刈作業機
1か月前
株式会社パクマケ
植栽用遮光板
25日前
花王株式会社
抗菌剤組成物
1か月前
鹿島建設株式会社
エビ類育成漁礁
1か月前
鹿島建設株式会社
レインガーデン
7日前
個人
害虫捕獲、解放及び駆除装置
13日前
個人
落口枡用取付部材及び落口枡
7日前
株式会社泰
愛玩動物用タワー家具
20日前
井関農機株式会社
水田引水管理システム
1か月前
株式会社ササキコーポレーション
農作業機
5日前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
移植機
1か月前
有限会社マドネスジャパン
ポッパー
1か月前
株式会社クボタ
移植機
1か月前
OTIS株式会社
ルアー用スカート
3日前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
株式会社クボタ
移植機
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ