TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025107750
公報種別
公開特許公報(A)
公開日
2025-07-22
出願番号
2024001146
出願日
2024-01-09
発明の名称
車両の走行制御装置
出願人
株式会社デンソー
,
株式会社J-QuAD DYNAMICS
,
トヨタ自動車株式会社
代理人
個人
主分類
B60W
30/182 20200101AFI20250714BHJP(車両一般)
要約
【課題】各制御モードにおける加速度を事前に想定しておくことを必要とせず、複数の制御モードを適切に切り替える。
【解決手段】走行制御装置(70)は、パルスモードとグライドモードとを切り替えて実行可能である。勾配算出部(63)は、エンジンECU(61)により算出されたエンジン(11)の出力、自車両(10)の既知の重量、及び算出した勾配に基づいて、パルスモードが実行されると仮定した場合のパルス加速度と、グライドモードが実行されると仮定した場合のグライド加速度とを算出可能である。走行制御装置は、パルスモードの実行時に現在からグライドモードが実行されると仮定した場合に、取得した自車速、相対速度、車間距離、グライド加速度、及び先行車加速度に基づいて、先行車速と自車速とが一致する時点に車間距離が目標車間距離よりも短くなると判定したことを条件として、パルスモードからグライドモードへ切り替える。
【選択図】 図1
特許請求の範囲
【請求項1】
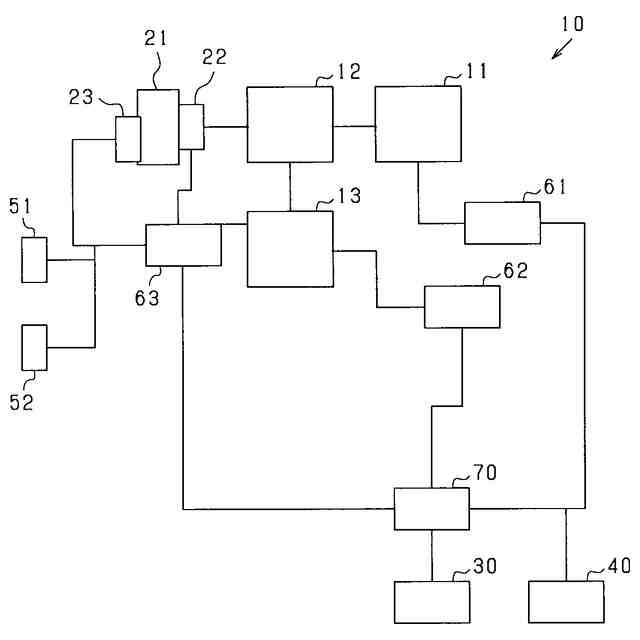
エンジン(11)と、駆動輪(21)と、前記エンジンと前記駆動輪との間で駆動力を伝達及び遮断する伝達遮断機構(12)とを備える自車両(10)に適用され、前記自車両を先行車両に追従走行させる走行制御装置(70)であって、
前記自車両は、前記自車両の速度である自車速を検出する自車速検出部(23)と、前記先行車両と前記自車両との相対速度を検出する相対速度検出部(30、40、70)と、前記先行車両と前記自車両との距離である車間距離を検出する距離検出部(30)と、前記自車両が走行する走路の勾配を算出する勾配算出部(63)と、前記エンジンを制御するエンジンECU(61)と、を備え、
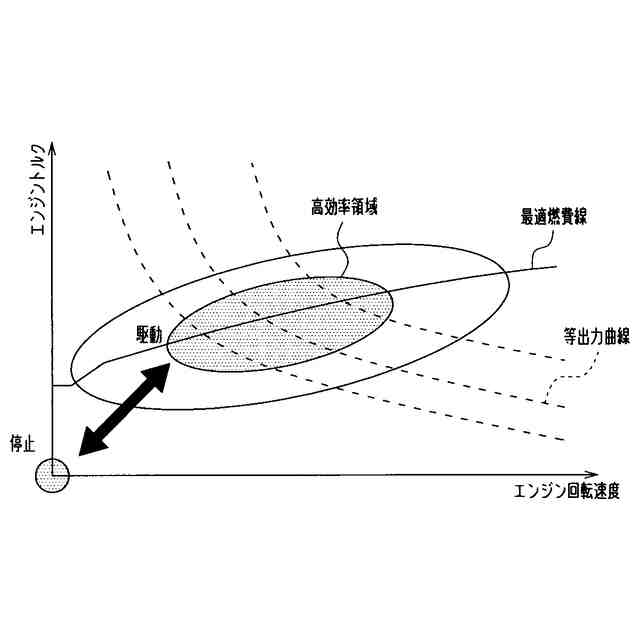
前記走行制御装置は、前記エンジンの熱効率が最高になる所定運転領域で前記エンジンを運転して前記自車両を走行させるパルスモードと、前記エンジンを停止させるとともに前記伝達遮断機構により前記駆動力を遮断させた状態で前記自車両を惰性走行させるグライドモードとを切り替えて実行可能であり、
前記エンジンECUは、前記エンジンの既知の特性及び前記エンジンの現在の運転状態に基づいて前記エンジンの出力を算出し、前記勾配算出部は、前記エンジンECUにより算出された前記エンジンの出力、前記自車両の既知の重量、及び算出した前記勾配に基づいて、前記パルスモードが実行されると仮定した場合の前記自車両の加速度であるパルス加速度と、前記グライドモードが実行されると仮定した場合の前記自車両の加速度であるグライド加速度とを算出可能であり、
前記走行制御装置は、前記自車速検出部により検出された前記自車速、前記相対速度検出部により検出された前記相対速度、前記距離検出部により検出された前記車間距離、及び前記勾配算出部により算出された前記パルス加速度及び前記グライド加速度を取得し、前記パルスモードの実行時に現在から前記グライドモードが実行されると仮定した場合に、取得した前記自車速、取得した前記相対速度、取得した前記車間距離、取得した前記グライド加速度、及び、取得又は算出した前記先行車両の加速度である先行車加速度に基づいて、前記先行車両の速度である先行車速と前記自車速とが一致する時点である速度一致時点に前記車間距離が所定の目標車間距離よりも短くなると判定したことを条件として、前記パルスモードから前記グライドモードへ切り替える、車両の走行制御装置。
続きを表示(約 1,900 文字)
【請求項2】
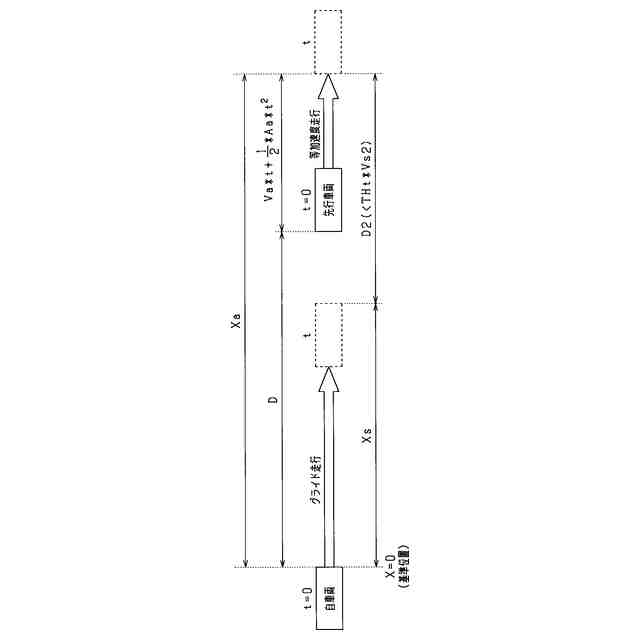
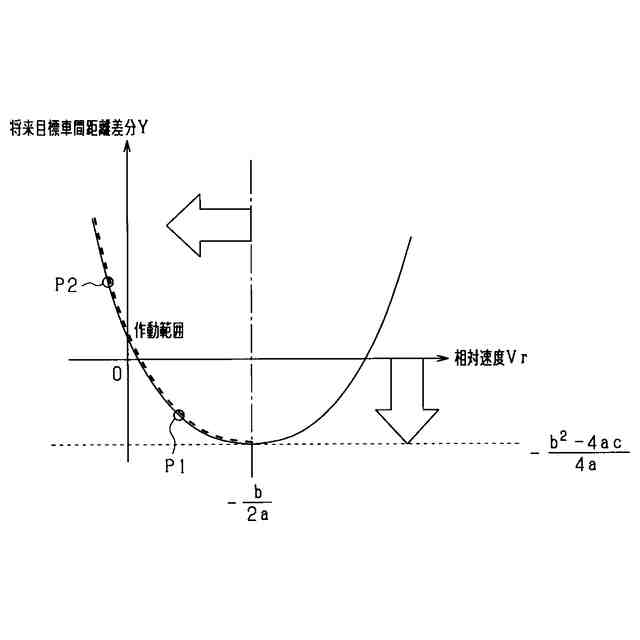
所定の目標車間時間をTHt、前記自車速をVs、前記グライド加速度をAg、前記相対速度をVr、前記先行車加速度をAa、前記車間距離をDで表して、
THt*{Vs-Ag*Vr/(Aa-Ag)}>D-(1/2)*(Vr^2)/(Aa-Ag)、且つAa-Ag>0であると判定したことを前記条件として、前記走行制御装置は前記パルスモードから前記グライドモードへ切り替える、請求項1に記載の車両の走行制御装置。
【請求項3】
さらにTHt*Aa>Vrであると判定したことを前記条件として、前記走行制御装置は前記パルスモードから前記グライドモードへ切り替える、請求項2に記載の車両の走行制御装置。
【請求項4】
エンジン(11)と、駆動輪(21)と、前記エンジンと前記駆動輪との間で駆動力を伝達及び遮断する伝達遮断機構(12)とを備える自車両(10)に適用され、前記自車両を先行車両に追従走行させる走行制御装置(70)であって、
前記自車両は、前記自車両の速度である自車速を検出する自車速検出部(23)と、前記先行車両と前記自車両との相対速度を検出する相対速度検出部(30、40、70)と、前記先行車両と前記自車両との距離である車間距離を検出する距離検出部(30)と、前記自車両が走行する走路の勾配を算出する勾配算出部(63)と、前記エンジンを制御するエンジンECU(61)と、を備え、
前記走行制御装置は、前記エンジンの熱効率が最高になる所定運転領域で前記エンジンを運転して前記自車両を走行させるパルスモードと、前記エンジンを停止させるとともに前記伝達遮断機構により前記駆動力を遮断させた状態で前記自車両を惰性走行させるグライドモードとを切り替えて実行可能であり、
前記エンジンECUは、前記エンジンの既知の特性及び前記エンジンの現在の運転状態に基づいて前記エンジンの出力を算出し、前記勾配算出部は、前記エンジンECUにより算出された前記エンジンの出力、前記自車両の既知の重量、及び算出した前記勾配に基づいて、前記パルスモードが実行されると仮定した場合の前記自車両の加速度であるパルス加速度と、前記グライドモードが実行されると仮定した場合の前記自車両の加速度であるグライド加速度とを算出可能であり、
前記走行制御装置は、前記自車速検出部により検出された前記自車速、前記相対速度検出部により検出された前記相対速度、前記距離検出部により検出された前記車間距離、及び前記勾配算出部により算出された前記パルス加速度及び前記グライド加速度を取得し、前記グライドモードの実行時に現在から前記パルスモードが実行されると仮定した場合に、取得した前記自車速、取得した前記相対速度、取得した前記車間距離、取得した前記パルス加速度、及び、取得又は算出した前記先行車両の加速度である先行車加速度に基づいて、前記先行車両の速度である先行車速と前記自車速とが一致する時点である速度一致時点に前記車間距離が所定の目標車間距離よりも長くなると判定したことを条件として、前記グライドモードから前記パルスモードへ切り替える、車両の走行制御装置。
【請求項5】
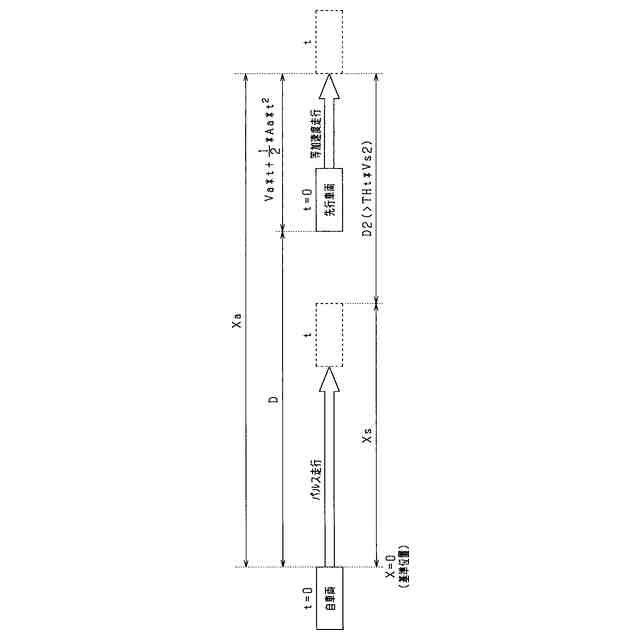
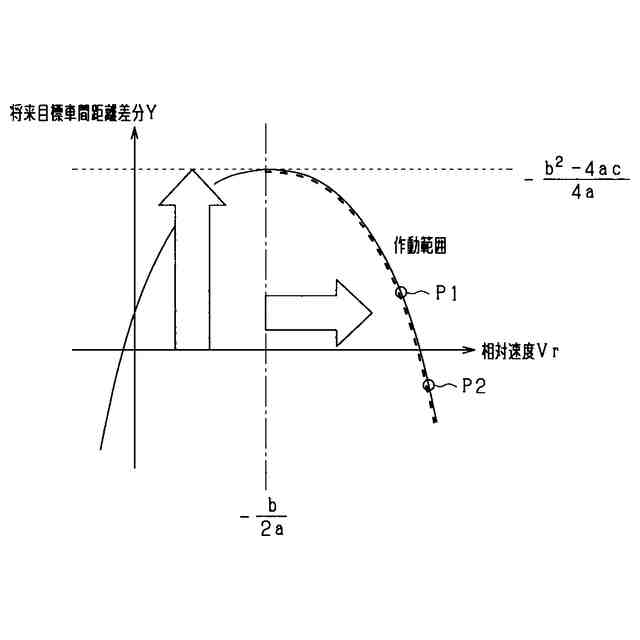
所定の目標車間時間をTHt、前記自車速をVs、前記パルス加速度をAp、前記相対速度をVr、前記先行車加速度をAa、前記車間距離をDで表して、
THt*{Vs-Ap*Vr/(Aa-Ap)}<D-(1/2)*(Vr^2)/(Aa-Ap)、且つAa-Ap<0であると判定したことを前記条件として、前記走行制御装置は前記グライドモードから前記パルスモードへ切り替える、請求項4に記載の車両の走行制御装置。
【請求項6】
さらにTHt*Aa<Vrであると判定したことを前記条件として、前記走行制御装置は前記グライドモードから前記パルスモードへ切り替える、請求項5に記載の車両の走行制御装置。
【請求項7】
前記走行制御装置は、前記先行車加速度をゼロとして前記判定を行う、請求項1~6のいずれか1項に記載の車両の走行制御装置。
【請求項8】
前記走行制御装置は、前記先行車両との車車間通信により前記先行車から前記先行車加速度を取得可能である場合は、前記先行車から前記先行車加速度を取得して前記判定を行い、前記先行車から前記先行車加速度を取得不能である場合は、前記先行車加速度をゼロとして前記判定を行う、請求項1~6のいずれか1項に記載の車両の走行制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両を先行車両に追従走行させる走行制御装置に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
例えば、先行車両との車間距離が予め設定した所定の値となるように自車両の駆動力を制御する第1制御モードと、エンジンを停止すると共にクラッチ機構を開放して自車両を惰性走行させる第2制御モードと、エンジンの最適燃費を示す領域を動作点としてエンジンを動作させる第3制御モードと、を実行する走行制御装置がある(特許文献1参照)。特許文献1に記載の走行制御装置は、自車両を基準とした自車両と先行車両との相対速度を横軸にし、自車両を基準とした自車両と先行車両との相対距離を縦軸にしたマップにおいて、第1~第3制御モードの各領域を区画する判定境界線を設定している。そして、相対速度及び相対距離で決まる自車両の現在の走行状態が判定境界線を越えた時に、制御モードを切り替えている。
【先行技術文献】
【特許文献】
【0003】
特開2018-134925号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に記載の走行制御装置において、第1~第3制御モードを適切に切り替えるためには、判定境界線を事前に適切に設定しておく必要がある。判定境界線を設定するためには、第2制御モード及び第3制御モードにおいてそれぞれ想定される加速度と、相対速度及び相対距離の変化との関係を考慮する必要がある。しかし、第2制御モード及び第3制御モードにおける加速度は、エンジンの特性、変速機の特性、車重、道路勾配、車両の空気抵抗等により変化するため、事前に想定しておくことが困難であり且つ手間がかかる。ひいては、判定境界線を事前に適切に設定しておくことは、困難であり且つ手間がかかる。
【0005】
本発明は、上記課題を解決するためになされたものであり、その主たる目的は、車両の走行制御装置において、各制御モードにおける加速度を事前に想定しておくことを必要とせず、複数の制御モードを適切に切り替えることにある。
【課題を解決するための手段】
【0006】
上記課題を解決するための第1の手段は、
エンジン(11)と、駆動輪(21)と、前記エンジンと前記駆動輪との間で駆動力を伝達及び遮断する伝達遮断機構(12)とを備える自車両(10)に適用され、前記自車両を先行車両に追従走行させる走行制御装置(70)であって、
前記自車両は、前記自車両の速度である自車速を検出する自車速検出部(23)と、前記先行車両と前記自車両との相対速度を検出する相対速度検出部(30、40、70)と、前記先行車両と前記自車両との距離である車間距離を検出する距離検出部(30)と、前記自車両が走行する走路の勾配を算出する勾配算出部(63)と、前記エンジンを制御するエンジンECU(61)と、を備え、
前記走行制御装置は、前記エンジンの熱効率が最高になる所定運転領域で前記エンジンを運転して前記自車両を走行させるパルスモードと、前記エンジンを停止させるとともに前記伝達遮断機構により前記駆動力を遮断させた状態で前記自車両を惰性走行させるグライドモードとを切り替えて実行可能であり、
前記エンジンECUは、前記エンジンの既知の特性及び前記エンジンの現在の運転状態に基づいて前記エンジンの出力を算出し、前記勾配算出部は、前記エンジンECUにより算出された前記エンジンの出力、前記自車両の既知の重量、及び算出した前記勾配に基づいて、前記パルスモードが実行されると仮定した場合の前記自車両の加速度であるパルス加速度と、前記グライドモードが実行されると仮定した場合の前記自車両の加速度であるグライド加速度とを算出可能であり、
前記走行制御装置は、前記自車速検出部により検出された前記自車速、前記相対速度検出部により検出された前記相対速度、前記距離検出部により検出された前記車間距離、及び前記勾配算出部により算出された前記パルス加速度及び前記グライド加速度を取得し、前記パルスモードの実行時に現在から前記グライドモードが実行されると仮定した場合に、取得した前記自車速、取得した前記相対速度、取得した前記車間距離、取得した前記グライド加速度、及び、取得又は算出した前記先行車両の加速度である先行車加速度に基づいて、前記先行車両の速度である先行車速と前記自車速とが一致する時点である速度一致時点に前記車間距離が所定の目標車間距離よりも短くなると判定したことを条件として、前記パルスモードから前記グライドモードへ切り替える。
【0007】
上記構成によれば、自車速検出部は自車速を検出し、相対速度検出部は前記先行車両と前記自車両との相対速度を検出し、距離検出部は車間距離を検出し、勾配算出部は走路の勾配を算出する。すなわち、自車両は、自車両の走行状態、自車両と他車両との走行状態の関係、及び自車両の走行環境を検出する検出部及び算出部を備えている。そして、エンジンECUは前記エンジンを制御する。なお、前記先行車両と前記自車両との相対速度は、先行車両の速度である先行車速から自車速を引いた速度である。
【0008】
前記走行制御装置は、パルスモードとグライドモードとを切り替えて実行可能である。パルスモードでは、通常は自車両が他車両に近づく。グライドモードでは、通常は自車両が他車両から離れる。このため、走行制御装置は、パルスモードとグライドモードとを切り替えて実行することにより、前記自車両を先行車両に追従走行させることができる。
【0009】
ここで、エンジンECUは前記エンジンを制御しているため、エンジンの回転速度及び出力トルク(運転状態)を把握している。このため、前記エンジンECUは、前記エンジンの既知の特性及び前記エンジンの現在の運転状態に基づいてエンジンの出力を算出することができる。そして、勾配算出部は、エンジンECUにより算出された前記エンジンの出力、前記自車両の既知の重量、及び算出した前記勾配に基づいて、前記パルスモードが実行されると仮定した場合のパルス加速度と、前記グライドモードが実行されると仮定した場合のグライド加速度とを適切に算出することができる。
【0010】
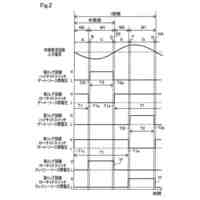
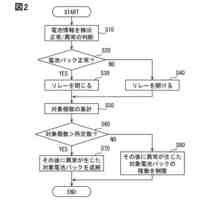
例えば、パルスモードが実行されている状態として、車間距離が所定の目標車間距離よりも長く、且つ自車速が先行車速よりも高くなっている状態を想定することができる。その状態からパルスモードを継続する時間が長過ぎると、車間距離が目標車間距離よりも短くなり、且つ自車速が先行車速よりも高くなり過ぎるおそれがある。このため、それよりも前に、パルスモードからグライドモードに切り替える適切な時点が存在すると考えられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソーエレクトロニクス
発音器
1か月前
株式会社デンソー
受電装置
29日前
株式会社デンソー
電子装置
1か月前
株式会社デンソーウェーブ
決済端末
1か月前
株式会社デンソー
受電装置
1か月前
株式会社デンソー
駆動装置
7日前
株式会社デンソー
受電装置
7日前
株式会社デンソー
電源装置
10日前
株式会社デンソー
検出装置
1か月前
株式会社デンソー
制御装置
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
撮像装置
1か月前
株式会社デンソー
熱交換器
1か月前
株式会社デンソー
熱交換器
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
冷却装置
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
受電装置
23日前
株式会社デンソー
光学部材
今日
株式会社デンソー
通信装置
今日
株式会社デンソー
ステータ
23日前
株式会社デンソー
電気装置
1か月前
株式会社デンソー
通信装置
1か月前
株式会社デンソー
熱音響装置
24日前
株式会社デンソー
圧電センサ
1か月前
株式会社デンソー
半導体装置
7日前
株式会社デンソー
レーダ装置
1か月前
株式会社デンソー
半導体装置
24日前
株式会社デンソー
半導体装置
22日前
株式会社デンソー
半導体装置
22日前
株式会社デンソー
センサ装置
4日前
株式会社デンソー
半導体装置
23日前
株式会社デンソー
半導体装置
23日前
株式会社デンソー
半導体装置
1か月前
株式会社デンソー
電流センサ
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ