TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025136776
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024035613
出願日
2024-03-08
発明の名称
破砕機
出願人
株式会社新居浜鉄工所
代理人
個人
主分類
B02C
18/24 20060101AFI20250911BHJP(破砕,または粉砕;製粉のための穀粒の前処理)
要約
【課題】破砕機において、過負荷による急停止を予防することによって作業効率と安全率との両立を容易に図る。
【解決手段】破砕機は、第1および第2のインバータ装置と、二軸制御装置とを備える。第2のトルク移動平均値が第2のトルク制限値未満、かつ、過負荷警報信号が過負荷保護制御の実行を示さない場合、第1のトルク移動平均値に応じた回転方向、かつ、第1のトルク移動平均値に応じた第1の駆動モータより遅い回転速度で、第2の駆動モータが駆動される。第2のトルク移動平均値が第2のトルク制限値以上である場合、逆転方向へ第2の駆動モータが駆動される。第2のトルク移動平均値が第2のトルク制限値未満、かつ、過負荷警報信号が過負荷保護制御の実行を示す場合、逆転方向へ第2の駆動モータが駆動される。
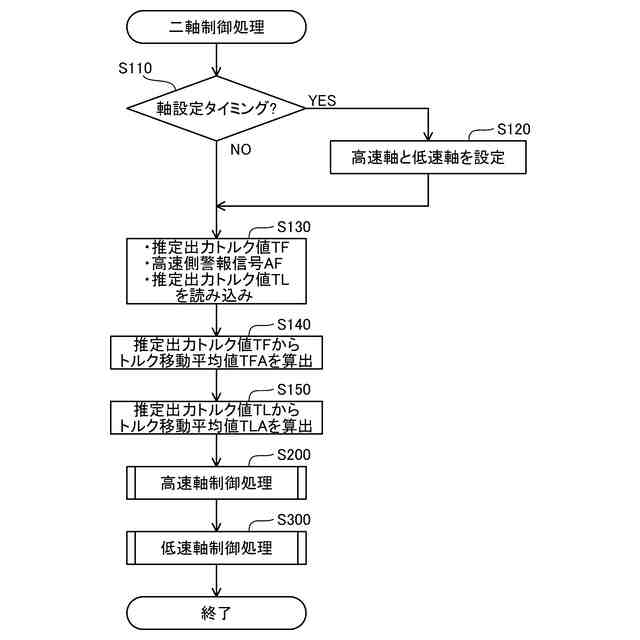
【選択図】図5
特許請求の範囲
【請求項1】
第1の破砕刃が外周に設けられた第1の回転軸と、
前記第1の回転軸に対して平行に配置され、第2の破砕刃が外周に設けられた第2の回転軸と、を備え、
前記第1の回転軸および前記第2の回転軸を正転方向に回転させることによって前記第1の破砕刃と前記第2の破砕刃との間に送り込んだ廃棄物を破砕する破砕機であって、
前記第1の回転軸および前記第2の回転軸の動作を制御する二軸制御装置と、
前記第1の回転軸を回転駆動する第1の駆動モータと、
前記二軸制御装置からの指示に基づいて第1のセンサレスベクトル制御によって前記第1の駆動モータの回転を制御する第1のインバータ装置と、
前記第2の回転軸を回転駆動する第2の駆動モータと、
前記二軸制御装置からの指示に基づいて第2のセンサレスベクトル制御によって前記第2の駆動モータの回転を制御する第2のインバータ装置と
を備え、
前記第1のインバータ装置は、
前記第1のセンサレスベクトル制御において前記第1の駆動モータの出力トルクとして推定される第1の推定出力トルク値を前記二軸制御装置に出力し、
前記第1の駆動モータが過負荷の状態にあるか否かを判断し、
前記第1の駆動モータが過負荷の状態であると判断した場合、前記第1の駆動モータを過負荷から保護する過負荷保護制御を実行し、
前記過負荷保護制御を実行する場合、前記過負荷保護制御の実行を示す過負荷警報信号を前記二軸制御装置に出力し、
前記第2のインバータ装置は、前記第2のセンサレスベクトル制御において前記第2の駆動モータの出力トルクとして推定される第2の推定出力トルク値を前記二軸制御装置に出力し、
前記二軸制御装置は、
前記第1のインバータ装置から入力される前記第1の推定出力トルク値の移動平均値である第1のトルク移動平均値を算出し、
前記第2のインバータ装置から入力される前記第2の推定出力トルク値の移動平均値である第2のトルク移動平均値を算出し、
前記第1のトルク移動平均値が第1のトルク制限値未満である場合、正転方向へ第1の回転速度で前記第1の駆動モータを駆動するように前記第1のインバータ装置に指示し、
前記第1のトルク移動平均値が前記第1のトルク制限値以上である場合、逆転方向へ前記第1の駆動モータを駆動するように前記第1のインバータ装置に指示し、
前記第2のトルク移動平均値が第2のトルク制限値未満、かつ、前記過負荷警報信号が前記過負荷保護制御の実行を示さない場合、前記第1のトルク移動平均値に応じた回転方向、かつ、前記第1のトルク移動平均値に応じた前記第1の回転速度より遅い回転速度で、前記第2の駆動モータを駆動するように前記第2のインバータ装置に指示し、
前記第2のトルク移動平均値が前記第2のトルク制限値以上である場合、逆転方向へ前記第2の駆動モータを駆動するように前記第2のインバータ装置に指示し、
前記第2のトルク移動平均値が前記第2のトルク制限値未満、かつ、前記過負荷警報信号が前記過負荷保護制御の実行を示す場合、逆転方向へ前記第2の駆動モータを駆動するように前記第2のインバータ装置に指示する、破砕機。
発明の詳細な説明
【技術分野】
【0001】
本明細書は、破砕機に関する技術を開示する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
破砕機として二軸破砕機が知られている。二軸破砕機は、相互に平行に配置されるとともに破砕刃が外周にそれぞれ設けられた二本の回転軸を備え、二本の回転軸を回転させることによって各破砕刃の間に送り込んだ廃棄物を破砕する。
【0003】
特許文献1,2には、インバータ制御による三相誘導式の駆動モータを用いて回転軸を駆動する二軸破砕機について開示されている。特許文献1の二軸破砕機は、駆動モータの出力トルクをセンサによって検出し、そのセンサ検出値を用いて駆動モータをフィードバック制御しながら破砕処理を行う。特許文献2の二軸破砕機は、駆動モータの回転速度をセンサによって検出し、そのセンサ検出値を用いて駆動モータをフィードバック制御しながら破砕処理を行う。
【0004】
また、一般的に、三相誘導式の駆動モータを制御する方式の一つとしてセンサレスベクトル制御が知られている(例えば、特許文献3を参照)。センサレスベクトル制御は、駆動モータに供給される電流値および電圧値に基づいて駆動モータの出力トルクおよび回転速度を推定し、その推定値を用いて駆動モータをフィードバック制御する。これによって、センサレスベクトル制御は、駆動モータの出力トルクおよび回転速度のセンサ検出値によるフィードバックを必要とすることなく駆動モータを制御可能である。
【先行技術文献】
【特許文献】
【0005】
特開2002-346420号公報
特開2005-152877号公報
特許第4543720号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
二軸破砕機においては、センサレスベクトル制御を用いて駆動モータを制御することについて十分な検討がなされていなかった。特に、二軸破砕機では、過負荷によって回転軸が急停止(ロック)する前に回転軸の過負荷を予防することが重要となる。回転軸の急停止は、破砕刃を始めとする破砕機の各部の損傷、並びに、破砕処理の停止に伴う作業効率の低下などの原因となる。
【課題を解決するための手段】
【0007】
本明細書に開示する技術は、以下の形態として実現できる。
【0008】
本明細書に開示する一形態は、第1の破砕刃が外周に設けられた第1の回転軸と;前記第1の回転軸に対して平行に配置され、第2の破砕刃が外周に設けられた第2の回転軸と、を備え、前記第1の回転軸および前記第2の回転軸を正転方向に回転させることによって前記第1の破砕刃と前記第2の破砕刃との間に送り込んだ廃棄物を破砕する破砕機である。この破砕機は、前記第1の回転軸および前記第2の回転軸の動作を制御する二軸制御装置と;前記第1の回転軸を回転駆動する第1の駆動モータと;前記二軸制御装置からの指示に基づいて第1のセンサレスベクトル制御によって前記第1の駆動モータの回転を制御する第1のインバータ装置と;前記第2の回転軸を回転駆動する第2の駆動モータと;前記二軸制御装置からの指示に基づいて第2のセンサレスベクトル制御によって前記第2の駆動モータの回転を制御する第2のインバータ装置とを備える。前記第1のインバータ装置は、前記第1のセンサレスベクトル制御において前記第1の駆動モータの出力トルクとして推定される第1の推定出力トルク値を前記二軸制御装置に出力し;前記第1の駆動モータが過負荷の状態にあるか否かを判断し;前記第1の駆動モータが過負荷の状態であると判断した場合、前記第1の駆動モータを過負荷から保護する過負荷保護制御を実行し;前記過負荷保護制御を実行する場合、前記過負荷保護制御の実行を示す過負荷警報信号を前記二軸制御装置に出力する。前記第2のインバータ装置は、前記第2のセンサレスベクトル制御において前記第2の駆動モータの出力トルクとして推定される第2の推定出力トルク値を前記二軸制御装置に出力する。前記二軸制御装置は、前記第1のインバータ装置から入力される前記第1の推定出力トルク値の移動平均値である第1のトルク移動平均値を算出し、;前記第2のインバータ装置から入力される前記第2の推定出力トルク値の移動平均値である第2のトルク移動平均値を算出し;前記第1のトルク移動平均値が第1のトルク制限値未満である場合、正転方向へ第1の回転速度で前記第1の駆動モータを駆動するように前記第1のインバータ装置に指示し;前記第1のトルク移動平均値が前記第1のトルク制限値以上である場合、逆転方向へ前記第1の駆動モータを駆動するように前記第1のインバータ装置に指示し;前記第2のトルク移動平均値が第2のトルク制限値未満、かつ、前記過負荷警報信号が前記過負荷保護制御の実行を示さない場合、前記第1のトルク移動平均値に応じた回転方向、かつ、前記第1のトルク移動平均値に応じた前記第1の回転速度より遅い回転速度で、前記第2の駆動モータを駆動するように前記第2のインバータ装置に指示し;前記第2のトルク移動平均値が前記第2のトルク制限値以上である場合、逆転方向へ前記第2の駆動モータを駆動するように前記第2のインバータ装置に指示し;前記第2のトルク移動平均値が前記第2のトルク制限値未満、かつ、前記過負荷警報信号が前記過負荷保護制御の実行を示す場合、逆転方向へ前記第2の駆動モータを駆動するように前記第2のインバータ装置に指示する。
この形態の破砕機によれば、第1のトルク移動平均値に応じた回転方向および回転速度による第2の駆動モータの制御では回避しきれない第1の回転軸の過負荷を、第1のインバータ装置からの過負荷警報信号に基づく第2の駆動モータの制御によって回避することができる。その結果、第1の回転軸の過負荷による急停止を予防できるため、作業効率と安全率との両立を容易に図ることができる。
【0009】
本明細書に開示する技術は、破砕機とは異なる種々の形態で実現できる。本明細書に開示する技術は、例えば、破砕機の制御装置および制御方法などの形態で実現できる。
【図面の簡単な説明】
【0010】
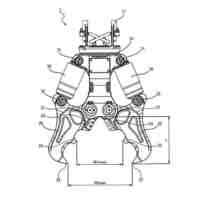
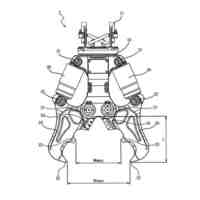
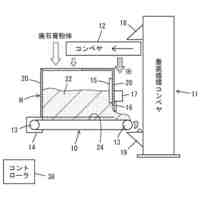
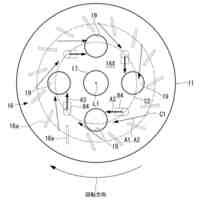
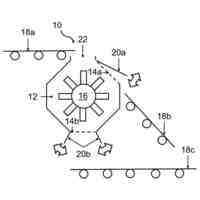
破砕機の構成を示す説明図である。
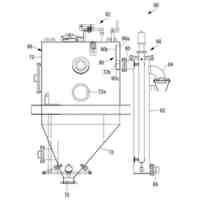
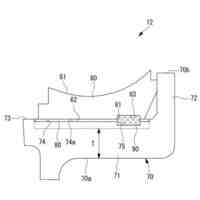
破砕機の処理容器の内部構成を示す説明図である。
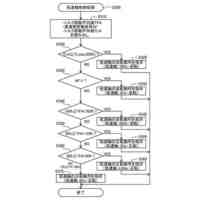
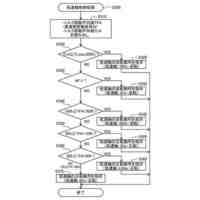
二軸制御装置のプロセッサが実行する二軸制御処理を示すフローチャートである。
二軸制御装置のプロセッサが実行する高速軸制御処理を示すフローチャートである。
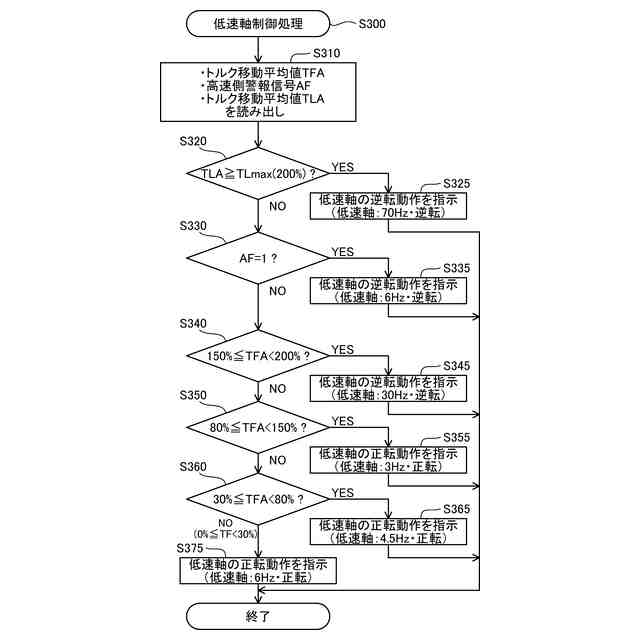
二軸制御装置のプロセッサが実行する低速軸制御処理を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社新居浜鉄工所
破砕機
24日前
株式会社新居浜鉄工所
破砕機
24日前
古河ロックドリル株式会社
破砕機
14日前
古河ロックドリル株式会社
破砕機
14日前
株式会社大晃
ゴムシート粉砕装置
14日前
日本化学工業株式会社
湿式粉砕方法
14日前
株式会社トクヤマ
廃石膏粒体の貯蔵方法および貯蔵システム
1か月前
UBE株式会社
金属異物の除去方法および装置
3日前
株式会社新居浜鉄工所
破砕機
24日前
株式会社栗本鐵工所
破砕制御システムおよびプログラム
4日前
三菱重工業株式会社
スピレージホッパ及び粉砕機並びにスピレージホッパの運転方法
17日前
三菱重工業株式会社
粉砕テーブル及び固体燃料粉砕装置並びに粉砕テーブルの補修方法
3日前
三菱重工業株式会社
固体燃料粉砕装置及びボイラ設備並びに固体燃料粉砕装置の運転方法
4日前
竹本油脂株式会社
湿式粉砕用助剤およびそれを含有する水性スラリー組成物
1か月前
株式会社栗本鐵工所
破砕制御システム、摩耗量予測装置およびプログラム
5日前
DOWAホールディングス株式会社
シミュレーション装置及びプログラム
3日前
テーエスエル リサイクリング ゲーエムベーハー ウント コー. カーゲー
不均質な投入材料から高純度のスクラップ材料を製造するプロセス
18日前
東京応化工業株式会社
レジスト組成物、レジストパターン形成方法、化合物、及び酸発生剤
18日前
東京応化工業株式会社
レジスト組成物、レジストパターン形成方法、化合物、及び酸発生剤
18日前
他の特許を見る




 特許ウォッチ
特許ウォッチ