TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024108620
公報種別
公開特許公報(A)
公開日
2024-08-13
出願番号
2023013072
出願日
2023-01-31
発明の名称
処理装置及びプログラム
出願人
京セラ株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G06T
7/70 20170101AFI20240805BHJP(計算;計数)
要約
【課題】物体が有する、外観が互いに類似する複数の面において、撮像装置側を向く面を適切に特定することを可能にする技術を提供する。
【解決手段】処理装置は、撮像装置から外観が互いに類似する複数の面を有する物体の第1姿勢の第1画像を取得し、複数の面のうち撮像装置側を向く対象面を特定する制御部を備える。制御部は、物体の姿勢が前記第1姿勢とは異なる第2姿勢の第2画像をさらに取得する。制御部は、第1画像及び第2画像に基づいて対象面を特定する。
【選択図】図1
特許請求の範囲
【請求項1】
撮像装置から外観が互いに類似する複数の面を有する物体の第1姿勢の第1画像を取得し、前記複数の面のうち前記撮像装置側を向く対象面を特定する制御部を備え、
前記制御部は、
前記物体の姿勢が前記第1姿勢とは異なる第2姿勢の第2画像をさらに取得し、
前記第1画像及び前記第2画像に基づいて前記対象面を特定する、処理装置。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載の処理装置であって、
前記制御部は、
前記第1画像に基づいて、前記複数の面のそれぞれが前記対象面であるとした場合の前記物体の姿勢を推定した複数の第1推定姿勢を取得し、
前記第2画像に基づいて、前記複数の面のそれぞれが前記対象面であるとした場合の前記物体の姿勢を推定した複数の第2推定姿勢を取得し、
前記複数の第1推定姿勢及び前記複数の第2推定姿勢に基づいて前記対象面を特定する、処理装置。
【請求項3】
請求項2に記載の処理装置であって、
前記第2姿勢は、前記物体の姿勢が前記第1姿勢とは異なるように前記物体が前記撮像装置に対して相対的に回転した姿勢であり、
前記制御部は、
前記複数の第1推定姿勢が回転した複数の第1回転推定姿勢を取得し、
前記複数の第1回転推定姿勢と前記複数の第2推定姿勢とを、対応する面ごとに比較する比較処理を行い、当該比較処理の結果に基づいて前記対象面を特定する、処理装置。
【請求項4】
請求項2に記載の処理装置であって、
前記制御部は、
前記複数の第1推定姿勢に基づいて、前記物体の前記第1画像に写る姿勢を、前記物体を保持する保持機構の座標系で示す複数の第1変換推定姿勢を取得し、
前記複数の第2推定姿勢に基づいて、前記物体の前記第2画像に写る姿勢を前記保持機構の前記座標系で示す複数の第2変換推定姿勢を取得し、
前記複数の第1変換推定姿勢と前記複数の第2変換推定姿勢とに基づいて前記対象面を特定する、処理装置。
【請求項5】
請求項1に記載の処理装置であって、
前記第2姿勢は、前記物体の姿勢が前記第1姿勢とは異なるように前記物体が前記撮像装置に対して相対的に回転した姿勢であり、
前記制御部は、
前記第1画像に基づいて、前記複数の面のそれぞれが前記対象面であるとした場合の前記物体の姿勢を推定した複数の第1推定姿勢を取得し、
前記複数の第1推定姿勢が回転した複数の第1回転推定姿勢を取得し、
前記複数の第1回転推定姿勢と前記第2画像との類似度に基づいて、前記対象面を特定する、処理装置。
【請求項6】
請求項5に記載の処理装置であって
前記制御部は、
前記物体の姿勢がそれぞれ対応付けられた複数のテンプレートと画像とを比較するテンプレートマッチングを実行可能であり、
前記複数の第1回転推定姿勢のそれぞれに対応する対応テンプレートを特定し、
前記対応テンプレートと前記第2画像とを比較するテンプレートマッチングを行い、当該テンプレートマッチングの結果に基づいて、前記対象面を特定する、処理装置。
【請求項7】
請求項1から請求項6のいずれか一つに記載の処理装置であって、
前記制御部は、前記物体を保持する保持機構の移動によって変更された前記第2姿勢の前記第2画像を取得する、処理装置。
【請求項8】
請求項1から請求項6のいずれか一つに記載の処理装置であって、
前記制御部は、前記撮像装置の移動によって変更された前記第2姿勢の前記第2画像を取得する、処理装置。
【請求項9】
請求項1から請求項6のいずれか一つに記載の処理装置であって、
前記制御部は、
前記第1画像に基づいて、前記複数の面のそれぞれが前記対象面であるとした場合の前記物体の姿勢を推定した複数の第1推定姿勢を取得し、
前記複数の第1推定姿勢のうち、特定した前記対象面に対応する第1推定姿勢を、前記第1画像が前記撮像装置で生成される場合の前記物体の姿勢の最終的な推定結果とする、処理装置。
【請求項10】
請求項2から請求項6のいずれか一つに記載の処理装置であって、
前記制御部は、前記複数の第2推定姿勢または前記複数の第1回転推定姿勢のうち、特定した前記対象面に対応する第2推定姿勢または第1回転推定姿勢を、前記第2画像が前記撮像装置で生成される場合の前記物体の姿勢の最終的な推定結果とする、処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、物体において撮像装置側を向く面を特定する技術に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、吸着ノイズに吸着した部品の吸着姿勢が表裏反対であるか否かを判定する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2009-130034号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
物体において撮像装置側を向く面を特定する技術については改善の余地がある。
【課題を解決するための手段】
【0005】
処理装置及びプログラムが開示される。一の実施の形態では、処理装置は、撮像装置から外観が互いに類似する複数の面を有する物体の第1姿勢の第1画像を取得し、複数の面のうち撮像装置側を向く対象面を特定する制御部を備える。制御部は、物体の姿勢が前記第1姿勢とは異なる第2姿勢の第2画像をさらに取得する。制御部は、第1画像及び第2画像に基づいて対象面を特定する。
【0006】
また、一の実施の形態では、プログラムは、コンピュータ装置に、上記の処理装置として機能させるためのプログラム。
【発明の効果】
【0007】
物体が有する、外観が互いに類似する複数の面において、撮像装置側を向く面を適切に特定することができる。
【図面の簡単な説明】
【0008】
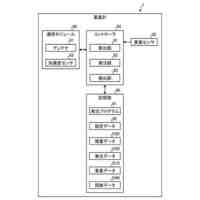
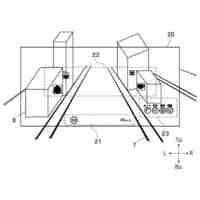
処理装置の一例を示す概略図である。
物体が撮像装置で撮像される様子の一例を示す概略図である。
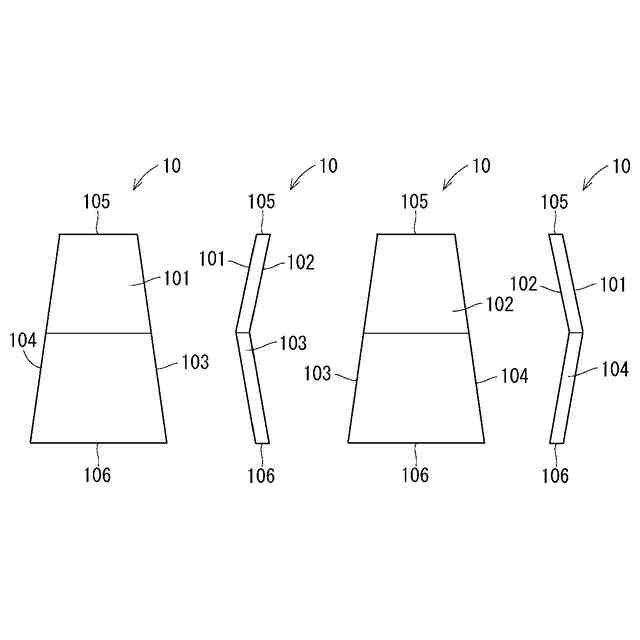
物体の一例を示す概略図である。
処理装置の動作の一例を示すフローチャートである。
撮像装置から見た物体の様子の一例を示す概略図である。
撮像装置から見た物体の様子の一例を示す概略図である。
撮像装置から見た物体の様子の一例を示す概略図である。
撮像装置から見た物体の様子の一例を示す概略図である。
回転軸の一例を示す概略図である。
物体の回転動作の一例を示す概略図である。
処理装置の動作の一例を示すフローチャートである。
ロボットに保持された物体が撮像装置で撮像される様子の一例を示す概略図である。
処理装置の動作の一例を示すフローチャートである。
処理装置の動作の一例を示すフローチャートである。
処理装置の動作の一例を示すフローチャートである。
処理装置の動作の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
図1は処理装置1の構成の一例を示す概略図である。処理装置1は、物体10を撮像する撮像装置8で生成される画像に基づいて、物体10において撮像装置8側を向く面を特定することが可能である。図2は、物体10が撮像装置8で撮像される様子の一例を示す概略図である。
【0010】
図2に示されるように、撮像装置8は、例えば、ロボット9で保持されている物体10を撮像する。撮像装置8はカメラとも呼ばれる。撮像装置8は、例えば、2次元のカラー画像を生成することが可能である。カラー画像は例えばRGB画像とも呼ばれる。以後、撮像装置8で生成される画像を単に撮像画像と呼ぶことがある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
京セラ株式会社
液滴吐出装置
18日前
京セラ株式会社
燃料電池装置
6日前
京セラ株式会社
燃料電池装置
6日前
京セラ株式会社
学習装置、および分類装置
12日前
京セラ株式会社
方法、電子機器、及びプログラム
16日前
京セラ株式会社
制御方法、電子機器、及びプログラム
16日前
京セラ株式会社
電子機器、制御方法および制御プログラム
6日前
京セラ株式会社
電子機器、算出方法、及び算出プログラム
10日前
京セラ株式会社
制御プログラム、表示制御装置及び制御方法
17日前
京セラ株式会社
ストレス検出装置およびストレス検出システム
6日前
京セラ株式会社
重量計
5日前
京セラ株式会社
レーザ素子、レーザモジュール、およびレーザ素子の製造方法
6日前
京セラ株式会社
通信制御方法
12日前
京セラ株式会社
装置及び方法
25日前
京セラ株式会社
非接触通信媒体
10日前
京セラ株式会社
通信装置及び通信方法
12日前
京セラ株式会社
通信制御方法及び中継ノード
19日前
京セラ株式会社
太陽光発電システム、電力変換装置、太陽光発電方法、移動体、及びプログラム
10日前
京セラ株式会社
セル再選択方法及びユーザ装置
12日前
京セラ株式会社
摺動部材および摺動部材の製造方法
23日前
京セラ株式会社
印刷配線板および印刷配線板の製造方法
5日前
京セラ株式会社
半導体素子の製造方法および半導体デバイス
16日前
京セラ株式会社
通信制御方法、基地局、ユーザ装置及びプロセッサ
19日前
京セラ株式会社
通信制御方法、基地局、コアネットワーク装置及びシステム
19日前
国立大学法人佐賀大学
人工関節用ステムおよびその製造方法
5日前
京セラ株式会社
方法、ユーザ装置、プロセッサ、プログラム及び通信システム
12日前
京セラ株式会社
虚像表示装置、移動体、虚像表示装置の駆動方法、及びプログラム
12日前
京セラ株式会社
通信制御方法、ユーザ装置、プロセッサ、移動通信システム及びプログラム
19日前
京セラ株式会社
通信制御方法、ユーザ装置、プロセッサ、プログラム及び移動通信システム
5日前
京セラ株式会社
通信方法、ネットワークノード、ユーザ装置、プロセッサ、プログラム、及び移動通信システム
19日前
個人
情報処理システム
10日前
個人
防災情報システム
23日前
日本精機株式会社
表示装置
3日前
個人
指先受の付いたマウス。
6日前
個人
介護者指名システム
17日前
有限会社マイコム
制御盤のAI見積
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ