TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024053095
公報種別
公開特許公報(A)
公開日
2024-04-12
出願番号
2024036624,2022560679
出願日
2024-03-11,2021-10-04
発明の名称
光学系および光学機器
出願人
株式会社ニコン
代理人
個人
,
個人
主分類
G02B
13/00 20060101AFI20240405BHJP(光学)
要約
【課題】合焦の際の収差変動が少ない光学系を提供する。
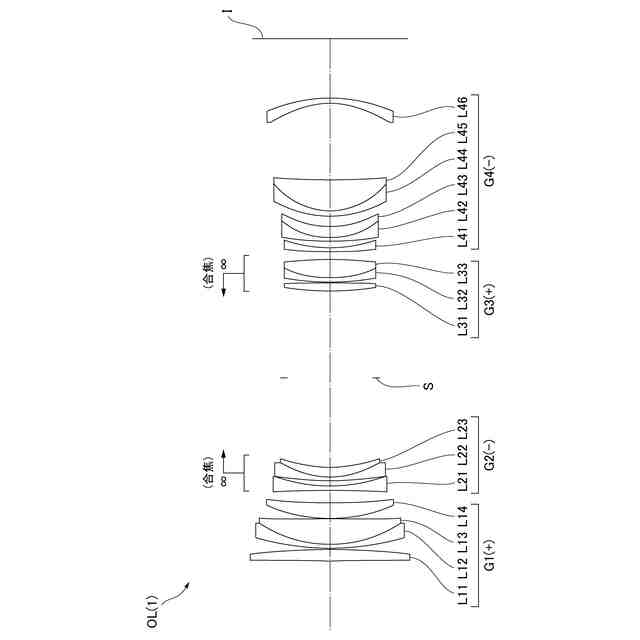
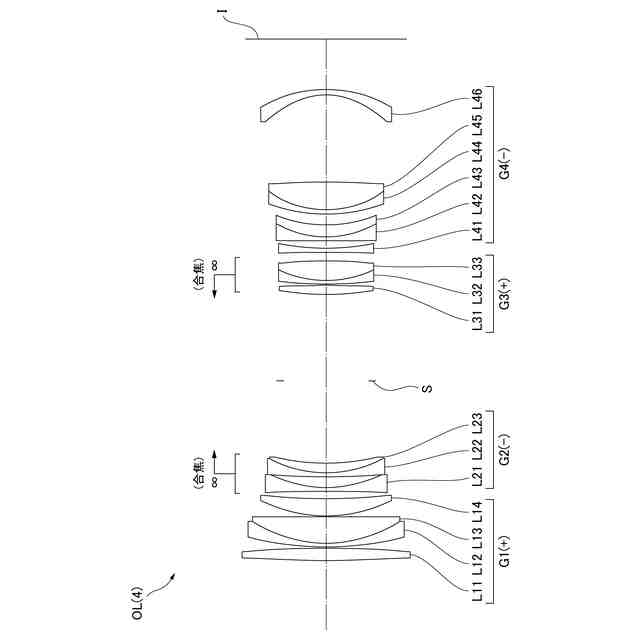
【解決手段】光学系OLは、光軸に沿って物体側から順に並んだ、正の屈折力を有する第1レンズ群G1と、負の屈折力を有する第2レンズ群G2と、正の屈折力を有する第3レンズ群G3と、負の屈折力を有する第4レンズ群G4とを有し、
合焦の際、第2レンズ群G2と第3レンズ群G3とが光軸に沿って移動し、隣り合う各レンズ群の間隔が変化し、
以下の条件式を満足する。
0.75<f1/(-f2)<1.30
但し、f1:第1レンズ群G1の焦点距離
f2:第2レンズ群G2の焦点距離
【選択図】図1
特許請求の範囲
【請求項1】
光軸に沿って物体側から順に並んだ、正の屈折力を有する第1レンズ群と、負の屈折力を有する第2レンズ群と、正の屈折力を有する第3レンズ群と、負の屈折力を有する第4レンズ群とを有し、
合焦の際、前記第2レンズ群と前記第3レンズ群とが光軸に沿って移動し、隣り合う各レンズ群の間隔が変化し、
以下の条件式を満足する光学系。
0.75<f1/(-f2)<1.30
但し、f1:前記第1レンズ群の焦点距離
f2:前記第2レンズ群の焦点距離
続きを表示(約 1,700 文字)
【請求項2】
光軸に沿って物体側から順に並んだ、正の屈折力を有する第1レンズ群と、負の屈折力を有する第2レンズ群と、正の屈折力を有する第3レンズ群と、負の屈折力を有する第4レンズ群とを有し、
合焦の際、前記第2レンズ群と前記第3レンズ群とが光軸に沿って移動し、隣り合う各レンズ群の間隔が変化し、
以下の条件式を満足する光学系。
3.00<(LnR2+LnR1)/(LnR2-LnR1)<5.00
但し、LnR1:前記光学系の最も像側に配置された負レンズにおける物体側のレンズ面の曲率半径
LnR2:前記光学系の最も像側に配置された負レンズにおける像側のレンズ面の曲率半径
【請求項3】
光軸に沿って物体側から順に並んだ、正の屈折力を有する第1レンズ群と、負の屈折力を有する第2レンズ群と、正の屈折力を有する第3レンズ群と、負の屈折力を有する第4レンズ群とを有し、
合焦の際、前記第2レンズ群と前記第3レンズ群とが光軸に沿って移動し、隣り合う各レンズ群の間隔が変化し、
前記第1レンズ群が以下の条件式を満足する負レンズを有する光学系。
1.80<ndM1
νdM1<26.00
θgFM1-(0.6415-0.00162×νdM1)<0.0120
但し、ndM1:前記第1レンズ群の前記負レンズのd線に対する屈折率
νdM1:前記第1レンズ群の前記負レンズのアッベ数
θgFM1:前記第1レンズ群の前記負レンズの部分分散比であり、前記第1レンズ群の前記負レンズのg線に対する屈折率をngM1とし、前記第1レンズ群の前記負レンズのF線に対する屈折率をnFM1とし、前記第1レンズ群の前記負レンズのC線に対する屈折率をnCM1としたとき、次式で定義される
θgFM1=(ngM1-nFM1)/(nFM1-nCM1)
【請求項4】
以下の条件式を満足する請求項1~3のいずれか一項に記載の光学系。
0.20<DG4/TL<0.40
但し、DG4:前記第4レンズ群の光軸上の長さ
TL:無限遠合焦状態での前記光学系の全長
【請求項5】
以下の条件式を満足する請求項1または3に記載の光学系。
3.00<(LnR2+LnR1)/(LnR2-LnR1)<5.00
但し、LnR1:前記光学系の最も像側に配置された負レンズにおける物体側のレンズ面の曲率半径
LnR2:前記光学系の最も像側に配置された負レンズにおける像側のレンズ面の曲率半径
【請求項6】
以下の条件式を満足する請求項3に記載の光学系。
0.75<f1/(-f2)<1.30
但し、f1:前記第1レンズ群の焦点距離
f2:前記第2レンズ群の焦点距離
【請求項7】
以下の条件式を満足する請求項1~6のいずれか一項に記載の光学系。
0.75<f1/f3<1.20
但し、f1:前記第1レンズ群の焦点距離
f3:前記第3レンズ群の焦点距離
【請求項8】
以下の条件式を満足する請求項1~7のいずれか一項に記載の光学系。
0.45<(-β)
但し、β:前記光学系の横倍率
【請求項9】
以下の条件式を満足する請求項1~8のいずれか一項に記載の光学系。
35.0<β2/β3<350.0
但し、β2:無限遠合焦状態での前記第2レンズ群の横倍率
β3:無限遠合焦状態での前記第3レンズ群の横倍率
【請求項10】
以下の条件式を満足する請求項1~8のいずれか一項に記載の光学系。
0.005<β3/β2<0.035
但し、β2:無限遠合焦状態での前記第2レンズ群の横倍率
β3:無限遠合焦状態での前記第3レンズ群の横倍率
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、光学系および光学機器に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来から、複数のレンズ群を光軸に沿って移動させて合焦を行う光学系が提案されている(例えば、特許文献1を参照)。このような光学系においては、合焦の際の収差変動を抑えることが難しい。
【先行技術文献】
【特許文献】
【0003】
特開2018-141888号公報
【発明の概要】
【0004】
第1の本発明に係る光学系は、光軸に沿って物体側から順に並んだ、正の屈折力を有する第1レンズ群と、負の屈折力を有する第2レンズ群と、正の屈折力を有する第3レンズ群と、負の屈折力を有する第4レンズ群とを有し、合焦の際、前記第2レンズ群と前記第3レンズ群とが光軸に沿って移動し、隣り合う各レンズ群の間隔が変化し、以下の条件式を満足する。
0.75<f1/(-f2)<1.30
但し、f1:前記第1レンズ群の焦点距離
f2:前記第2レンズ群の焦点距離
【0005】
第2の本発明に係る光学系は、光軸に沿って物体側から順に並んだ、正の屈折力を有する第1レンズ群と、負の屈折力を有する第2レンズ群と、正の屈折力を有する第3レンズ群と、負の屈折力を有する第4レンズ群とを有し、合焦の際、前記第2レンズ群と前記第3レンズ群とが光軸に沿って移動し、隣り合う各レンズ群の間隔が変化し、以下の条件式を満足する。
3.00<(LnR2+LnR1)/(LnR2-LnR1)<5.00
但し、LnR1:前記光学系の最も像側に配置された負レンズにおける物体側のレンズ面の曲率半径
LnR2:前記光学系の最も像側に配置された負レンズにおける像側のレンズ面の曲率半径
【0006】
第3の本発明に係る光学系は、光軸に沿って物体側から順に並んだ、正の屈折力を有する第1レンズ群と、負の屈折力を有する第2レンズ群と、正の屈折力を有する第3レンズ群と、負の屈折力を有する第4レンズ群とを有し、合焦の際、前記第2レンズ群と前記第3レンズ群とが光軸に沿って移動し、隣り合う各レンズ群の間隔が変化し、前記第1レンズ群が以下の条件式を満足する負レンズを有する。
1.80<ndM1
νdM1<26.00
θgFM1-(0.6415-0.00162×νdM1)<0.0120
但し、ndM1:前記第1レンズ群の前記負レンズのd線に対する屈折率
νdM1:前記第1レンズ群の前記負レンズのアッベ数
θgFM1:前記第1レンズ群の前記負レンズの部分分散比であり、前記第1レンズ群の前記負レンズのg線に対する屈折率をngM1とし、前記第1レンズ群の前記負レンズのF線に対する屈折率をnFM1とし、前記第1レンズ群の前記負レンズのC線に
対する屈折率をnCM1としたとき、次式で定義される
θgFM1=(ngM1-nFM1)/(nFM1-nCM1)
【0007】
本発明に係る光学機器は、上記光学系を備えて構成される。
【図面の簡単な説明】
【0008】
第1実施例に係る光学系のレンズ構成を示す図である。
図2(A)、図2(B)はそれぞれ、第1実施例に係る光学系の無限遠合焦状態、最至近距離合焦状態における諸収差図である。
第2実施例に係る光学系のレンズ構成を示す図である。
図4(A)、図4(B)はそれぞれ、第2実施例に係る光学系の無限遠合焦状態、最至近距離合焦状態における諸収差図である。
第3実施例に係る光学系のレンズ構成を示す図である。
図6(A)、図6(B)はそれぞれ、第3実施例に係る光学系の無限遠合焦状態、最至近距離合焦状態における諸収差図である。
第4実施例に係る光学系のレンズ構成を示す図である。
図8(A)、図8(B)はそれぞれ、第4実施例に係る光学系の無限遠合焦状態、最至近距離合焦状態における諸収差図である。
第5実施例に係る光学系のレンズ構成を示す図である。
図10(A)、図10(B)はそれぞれ、第5実施例に係る光学系の無限遠合焦状態、最至近距離合焦状態における諸収差図である。
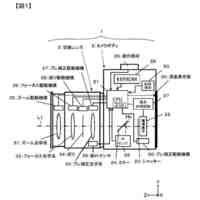
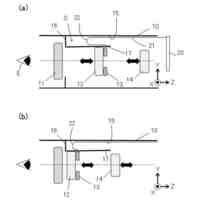
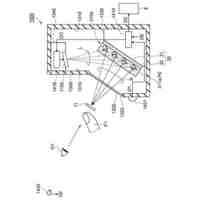
各実施形態に係る光学系を備えたカメラの構成を示す図である。
第1~第3実施形態に係る光学系の製造方法を示すフローチャートである。
第4実施形態に係る光学系の製造方法を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明に係る好ましい実施形態について説明する。まず、各実施形態に係る光学系を備えたカメラ(光学機器)を図11に基づいて説明する。このカメラ1は、図11に示すように、本体2と、本体2に装着される撮影レンズ3により構成される。本体2は、撮像素子4と、デジタルカメラの動作を制御する本体制御部(不図示)と、液晶画面5とを備える。撮影レンズ3は、複数のレンズ群からなる光学系OLと、各レンズ群の位置を制御するレンズ位置制御機構(不図示)とを備える。レンズ位置制御機構は、レンズ群の位置を検出するセンサと、レンズ群を光軸に沿って前後に移動させるモータと、モータを駆動する制御回路などにより構成される。
【0010】
被写体からの光は、撮影レンズ3の光学系OLにより集光されて、撮像素子4の像面I上に到達する。像面Iに到達した被写体からの光は、撮像素子4により光電変換され、デジタル画像データとして不図示のメモリに記録される。メモリに記録されたデジタル画像データは、ユーザの操作に応じて液晶画面5に表示することが可能である。なお、このカメラは、ミラーレスカメラでも、クイックリターンミラーを有した一眼レフタイプのカメラであっても良い。また、図11に示す光学系OLは、撮影レンズ3に備えられる光学系を模式的に示したものであり、光学系OLのレンズ構成はこの構成に限定されるものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ニコン
撮像装置
8日前
株式会社ニコン
情報処理装置
1日前
株式会社ニコン
ブレ補正装置
2日前
株式会社ニコン
加工システム
3日前
株式会社ニコン
検索システム
8日前
株式会社ニコン
基板重ね合わせ装置および基板処理方法
1日前
株式会社ニコン
画像処理方法、プログラム、及び画像処理装置
2日前
株式会社ニコン
露光装置、照明光学系、およびデバイス製造方法
10日前
日本精機株式会社
表示装置
17日前
東レ株式会社
光ファイバー
18日前
東レ株式会社
光ファイバー
18日前
アイカ工業株式会社
光学積層体
1日前
グンゼ株式会社
チューブ
17日前
株式会社サンリーブ
メガネフレーム
1日前
国立大学法人徳島大学
ナノ結晶構造体基板
2日前
個人
光コネクタソケット
1日前
日精テクノロジー株式会社
投射光学系
18日前
artience株式会社
積層体及びその用途
19日前
日本精機株式会社
ヘッドアップディスプレイ装置
19日前
キヤノン株式会社
レンズ装置
24日前
株式会社タムロン
光学系及び撮像装置
3日前
DIC株式会社
液晶素子
19日前
TOPPANホールディングス株式会社
調光ガラス
19日前
トヨタ自動車株式会社
端末装置
17日前
TOPPANホールディングス株式会社
液晶表示装置
19日前
AGC株式会社
光学フィルタ
18日前
日本精機株式会社
表示装置、虚像表示装置及び移動体
17日前
星和電機株式会社
波長選択型赤外放射制御部材
19日前
京セラ株式会社
波長変換素子
17日前
株式会社アイゾーンジャパン
ドライブサングラス
4日前
日亜化学工業株式会社
画像表示装置
23日前
日亜化学工業株式会社
映像表示装置
18日前
株式会社タムロン
ズームレンズ及び撮像装置
25日前
キヤノン株式会社
光学系及び表示装置
18日前
大日本印刷株式会社
光学素子、導光板
8日前
信越化学工業株式会社
光アイソレータ
17日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ