TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025112377
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024006563
出願日
2024-01-19
発明の名称
搬送装置及びウェーハ収納容器洗浄装置
出願人
芝浦メカトロニクス株式会社
代理人
弁理士法人虎ノ門知的財産事務所
主分類
H01L
21/677 20060101AFI20250725BHJP(基本的電気素子)
要約
【課題】処理を効率よく行うこと。
【解決手段】実施形態の搬送装置は、ウェーハ収納容器を載置台に搬送する搬送ロボットと、前記搬送ロボットにより搬送される前記ウェーハ収納容器の姿勢を検出する検出部と、前記検出部による検出結果に基づき、前記ウェーハ収納容器の前記姿勢を調整する制御部と、を有する姿勢調整装置を有し、前記搬送ロボットは、前記ウェーハ収納容器を把持する把持部を備え、前記把持部により前記ウェーハ収納容器を把持した状態で、前記ウェーハ収納容器を、前記ウェーハ収納容器が載置される載置台に搬送し、前記制御部は、前記検出部による検出結果に基づいて、前記ウェーハ収納容器の、前記載置台の前記載置面に載置される載置対象面が、前記載置面に載置される前に前記載置面に対して平行となるように、前記把持部の姿勢を調整する。
【選択図】図1
特許請求の範囲
【請求項1】
ウェーハ収納容器を載置台に搬送する搬送ロボットと、
前記搬送ロボットにより搬送される前記ウェーハ収納容器の姿勢を検出する検出部と、
前記検出部による検出結果に基づき、前記ウェーハ収納容器の前記姿勢を調整する制御部と、
を有する姿勢調整装置を有し、
前記搬送ロボットは、前記ウェーハ収納容器を把持する把持部を備え、前記把持部により前記ウェーハ収納容器を把持した状態で、前記ウェーハ収納容器を、前記ウェーハ収納容器が載置される載置台に搬送し、
前記制御部は、前記検出部による検出結果に基づいて、前記ウェーハ収納容器の、前記載置台の載置面に載置される載置対象面が、前記載置面に載置される前に前記載置面に対して平行となるように、前記把持部の姿勢を調整する、
搬送装置。
続きを表示(約 800 文字)
【請求項2】
前記制御部は、前記載置対象面が前記載置台の載置面に対して平行となるように前記把持部の前記姿勢が調整された状態で、前記ウェーハ収納容器を前記載置台に搬送するように前記搬送ロボットを制御する、請求項1に記載の搬送装置。
【請求項3】
前記検出部は、
前記載置対象面において、前記ウェーハ収納容器の、前記把持部により把持される側から把持される側とは反対側に向かう方向に沿う、異なる2箇所の高さ位置を検出し、
前記制御部は、前記検出部により検出された高さに基づいて、前記把持部の姿勢を調整する、
請求項1に記載の搬送装置。
【請求項4】
前記載置台には、前記載置対象面の四隅に対応する位置に位置決め部材が設けられ、
前記検出部は、前記位置決め部材のうち、少なくとも前記把持部により把持される側と、前記把持部により把持される側とは反対側の2箇所に設けられることを特徴とする請求項3に記載の搬送装置。
【請求項5】
前記検出部は、投光部および受光部を有する投受光センサであり、前記ウェーハ収納容器の、前記把持部により把持される側から、前記把持される側とは反対側に向かう方向と直交する方向に前記投光部の光軸を有し、前記把持部による把持される側から前記把持される側とは反対側に向かう方向に沿って複数並ぶように設けられ、
前記制御部は、前記検出部から出力された信号に基づいて、前記把持部の姿勢を調整する、
請求項1に記載の搬送装置。
【請求項6】
請求項1~5のいずれか1つに記載の搬送装置と、
前記載置台を有し、前記載置台の前記載置面に前記ウェーハ収納容器が載置された状態で前記ウェーハ収納容器を洗浄する洗浄ノズルを有する洗浄槽と、
を備える、ウェーハ収納容器洗浄装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、搬送装置及びウェーハ収納容器洗浄装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
FOUP(Front Opening Unified Pod)などのウェーハ収納容器は、様々な処理工程(例えば、レジスト塗布、露光・現像、エッチング(成膜)、レジスト剥離、洗浄など)を経て半導体素子が形成されるウェーハを、処理工程間で移動させる際に用いられる。FOUPは、ウェーハをFOUP内に保持した状態でロボットにより搬送される。
【0003】
FOUPは、FOUP本体及びドアを備え、FOUP本体にはロボットにより把持されるフランジが設けられている。ロボットのロボットハンドが、フランジを介して、FOUP本体の開口部(FOUPのドアが装着される側)が下方を向く方向でFOUP本体を保持した場合、フランジの一部が撓むことにより、FOUP本体がフランジの、ロボットハンドによって保持されている付近を支点として下方に垂れることがある。この場合、ロボットがフランジを把持した際に、FOUP本体の下端となる部分が水平面に対して傾斜する。このようにFOUP本体が傾斜した状態で、ロボットがFOUP本体を略水平なステージ等に載置するべく搬送すると、FOUP本体の下端となる部分と、ステージ等に設けられた位置決めピンとが合致せず、FOUP本体を載置することが困難である。
【0004】
上述したような場合には処理を中断してFOUPをアンロードすることになり、処理の効率が悪いという問題がある。
【先行技術文献】
【特許文献】
【0005】
特開2005-109523号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、上記のような課題を解決するためになされたものであり、その目的は、処理を効率よく行うことができる搬送装置及びウェーハ収納容器洗浄装置を提供することにある。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するため、本発明の一態様に係る搬送装置は、ウェーハ収納容器を載置台に搬送する搬送ロボットと、前記搬送ロボットにより搬送される前記ウェーハ収納容器の姿勢を検出する検出部と、前記検出部による検出結果に基づき、前記ウェーハ収納容器の前記姿勢を調整する制御部と、を有する姿勢調整装置を有し、前記搬送ロボットは、前記ウェーハ収納容器を把持する把持部を備え、前記把持部により前記ウェーハ収納容器を把持した状態で、前記ウェーハ収納容器を、前記ウェーハ収納容器が載置される載置台に搬送し、前記制御部は、前記検出部による検出結果に基づいて、前記ウェーハ収納容器の、前記載置台の前記載置面に載置される載置対象面が、前記載置面に載置される前に前記載置面に対して平行となるように、前記把持部の姿勢を調整する。
【0008】
また、上述した課題を解決し、目的を達成するため、本発明の一態様に係るウェーハ収納容器洗浄装置は、上記搬送装置と、前記載置台を有し、前記載置台の載置面に前記ウェーハ収納容器が載置された状態で前記ウェーハ収納容器を洗浄する洗浄ノズルを有する洗浄槽と、を備える。
【発明の効果】
【0009】
本発明の一態様によれば、処理を効率良く行うことができる搬送装置及びウェーハ収納容器洗浄装置を提供することができる。
【図面の簡単な説明】
【0010】
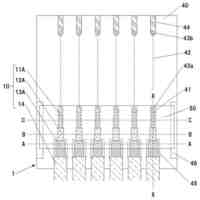
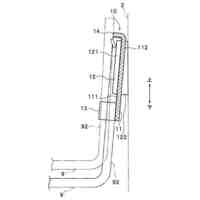
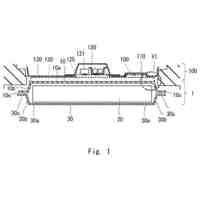
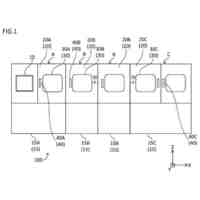
図1は、第1の実施形態に係るウェーハ収納容器洗浄装置の概略構成の一例を示す平面図である。
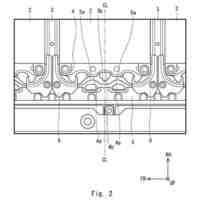
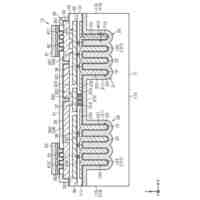
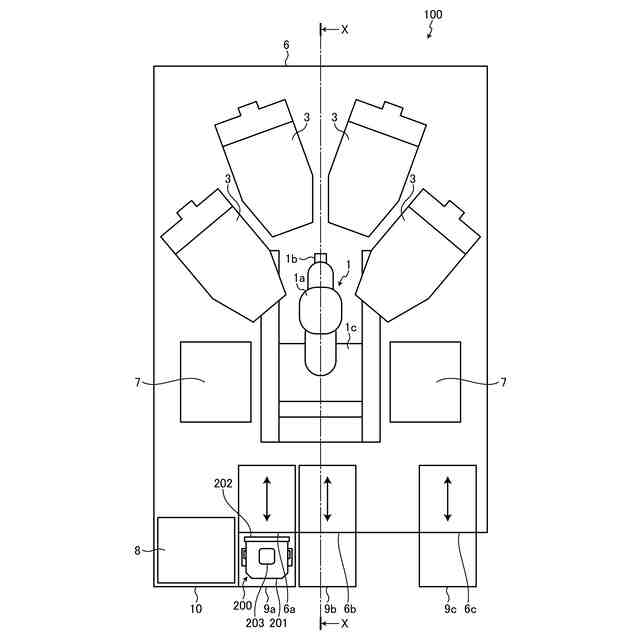
図2は、第1の実施形態に係るウェーハ収納容器洗浄装置のX-X線断面図である。
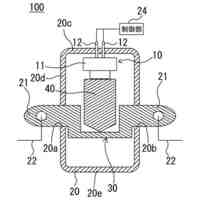
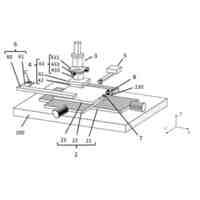
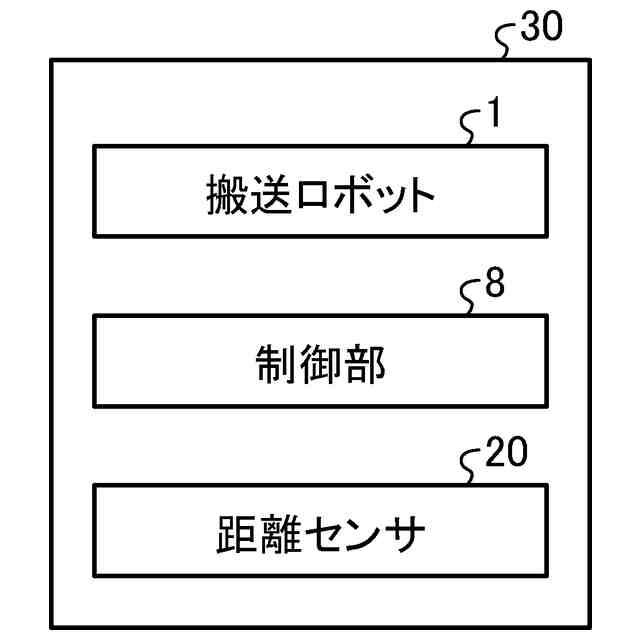
図3は、第1の実施形態に係る姿勢調整装置の構成の一例を示す図である。
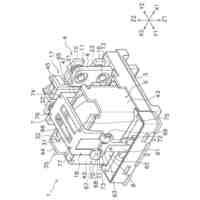
図4は、第1の実施形態に係る搬送ロボットの構成の一例を示す模式図である。
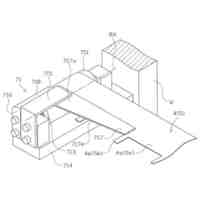
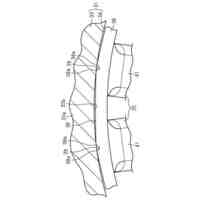
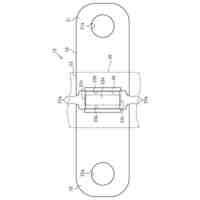
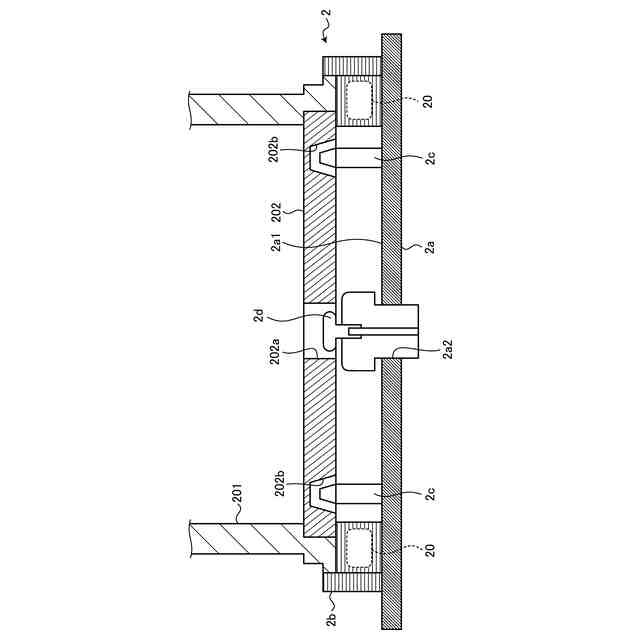
図5は、第1の実施形態に係る分解/連結ステージの一例を示す平面図である。
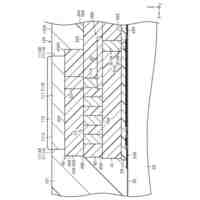
図6は、図5におけるY-Y線断面図(側面断面図)である。
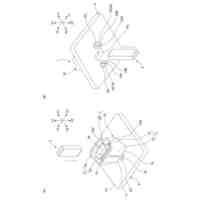
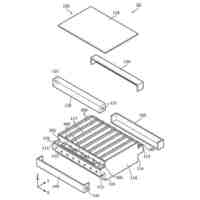
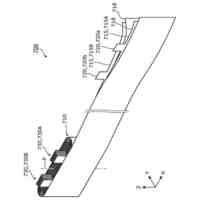
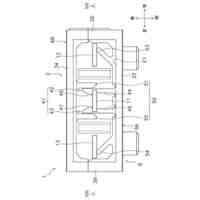
図7は、第1の実施形態に係る洗浄槽に設けられた回転テーブル(載置台)の一例を示す平面図である。
図8は、第1の実施形態に係る回転テーブルの側面の一部を示す図である。
図9は、第1の実施形態に係るロボットハンドが、フランジを把持し、容器本体を持ち上げた状態の一例を示す図である。
図10は、第1の実施形態に係るロボットハンドが、フランジを把持し、本体を持ち上げていない状態の一例を示す図である。
図11は、第1の実施形態において、容器本体の下面が水平面に対して平行となるように調整されたロボットハンドの姿勢の一例を示す図である。
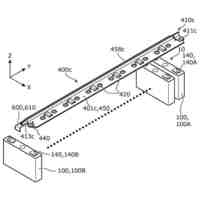
図12は、第2の実施形態に係るON/OFFセンサ及び分解/連結ステージの平面図である。
図13は、第2の実施形態に係るロボットハンドにより把持され、持ち上げられた容器本体、ON/OFFセンサ及び分解/連結ステージの側面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
雄端子
4日前
個人
後付地震遮断機
8日前
個人
超精密位置決め機構
9日前
愛知電機株式会社
電力機器
1日前
東レ株式会社
積層多孔質膜
12日前
株式会社潤工社
同軸ケーブル
1か月前
株式会社ExH
電流開閉装置
1か月前
CKD株式会社
巻回装置
11日前
ヒロセ電機株式会社
端子
1日前
個人
マルチバンドコイルアンテナ
24日前
エイブリック株式会社
半導体装置
1か月前
オムロン株式会社
電磁継電器
1か月前
株式会社GSユアサ
蓄電装置
15日前
株式会社GSユアサ
蓄電装置
1か月前
矢崎総業株式会社
電線
19日前
株式会社GSユアサ
蓄電素子
18日前
株式会社大阪ソーダ
複合固体電解質
18日前
住友電装株式会社
端子
3日前
株式会社GSユアサ
蓄電装置
1か月前
日星電気株式会社
ケーブルアセンブリ
1か月前
住友電装株式会社
端子台
1か月前
日本化薬株式会社
電流遮断装置
9日前
オムロン株式会社
スイッチ装置
1か月前
株式会社ダイヘン
変圧器
1か月前
トヨタ自動車株式会社
電源装置
1か月前
日本特殊陶業株式会社
保持装置
11日前
ダイハツ工業株式会社
固定治具
18日前
日本特殊陶業株式会社
保持装置
16日前
トヨタ自動車株式会社
電池パック
24日前
ローム株式会社
チップ部品
22日前
トヨタ自動車株式会社
電池パック
1か月前
ローム株式会社
チップ部品
1か月前
住友電装株式会社
コネクタ
3日前
個人
“hi-light surf.”
17日前
東レエンジニアリング株式会社
実装装置
19日前
TOWA株式会社
製造装置
16日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ