TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025094137
公報種別
公開特許公報(A)
公開日
2025-06-24
出願番号
2025045965,2022152954
出願日
2025-03-19,2022-09-26
発明の名称
ロボット、ロボット制御方法及びプログラム
出願人
カシオ計算機株式会社
代理人
個人
主分類
A63H
11/00 20060101AFI20250617BHJP(スポーツ;ゲーム;娯楽)
要約
【課題】簡易な構成で生き物感を表現する。
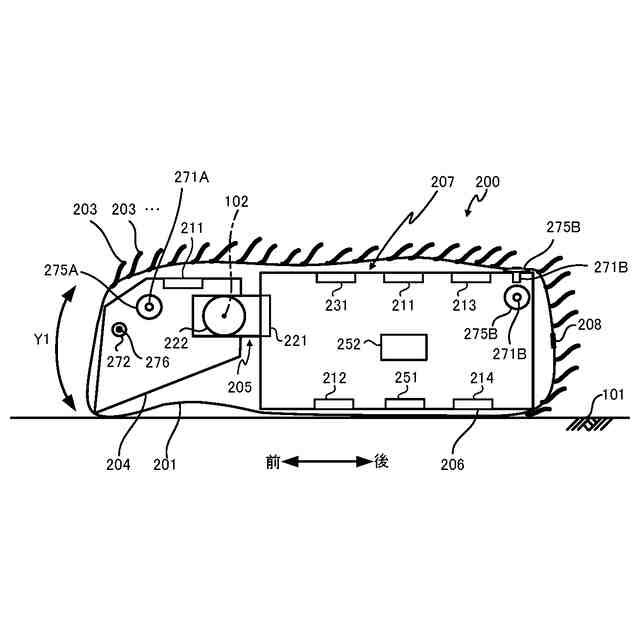
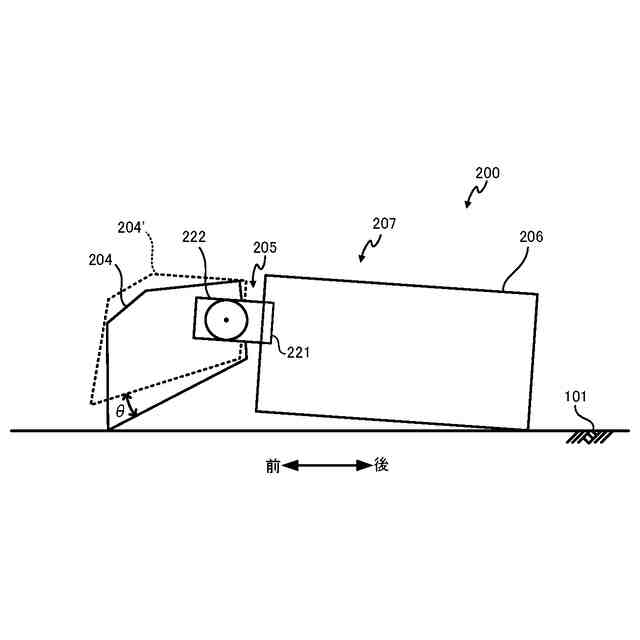
【解決手段】ロボット200は、生物を模したロボット200であって、胴体部206と、胴体部206の前端に接続された頭部204と、胴体部206に対して頭部204を動かすための可動部と、制御部と、を備え、胴体部206を載置面に置いた状態において、制御部が、頭部204が載置面を押す状態が変化するように頭部204を動かして、胴体部206の前端と載置面との距離を第1距離と第2距離との間で交互に変化させるように可動部を制御する第1制御を実行する。
【選択図】図2
特許請求の範囲
【請求項1】
生物を模したロボットであって、
胴体部と、
前記胴体部の前端に接続された頭部と、
前記胴体部に対して前記頭部を動かすための可動部と、
制御部と、
を備え、
前記胴体部を載置面に置いた状態において、
前記制御部が、
前記頭部が前記載置面を押す状態が変化するように前記頭部を動かして、前記胴体部の前端と前記載置面との距離を第1距離と第2距離との間で交互に変化させるように前記可動部を制御する第1制御を実行する、
ロボット。
続きを表示(約 1,700 文字)
【請求項2】
前記頭部及び前記胴体部を含む筐体を覆う柔軟性を有した外装をさらに備え、
前記胴体部を前記載置面に置いた状態において、
前記頭部は、前記胴体部との接続位置を中心として前記頭部の前端と前記載置面との距離が変化する方向に回転できるように、前記胴体部の前端に接続されており、
前記制御部が、
前記頭部の前端と前記載置面との距離が短くなる方向へ前記頭部を回転させる第1動作と、前記頭部の前端と前記載置面との距離が長くなる方向へ前記頭部を回転させる第2動作と、を交互に所定の周期で繰り返し実行するようにして前記第1制御を実行し、
前記制御部が前記第1動作を行った時に前記筐体を覆う前記外装の上側は引っ張られた状態になり、
前記制御部が前記第2動作を行った時に前記筐体を覆う前記外装の上側はたるんだ状態になる、
請求項1に記載のロボット。
【請求項3】
前記第1動作は、前記頭部の前端と前記載置面との距離が短くなるとともに、前記頭部の前端と前記胴体部との距離が短くなる方向へ前記頭部を回転させる動作であり、
前記第2動作は、前記頭部の前端と前記載置面との距離が長くなるとともに、前記頭部の前端と前記胴体部との距離が長くなる方向へ前記頭部が回転する動作である、
請求項2に記載のロボット。
【請求項4】
前記外装は、毛皮を模したものであり、
前記制御部が、
生物の呼吸を模した動作である呼吸動作を行うことが指示されている場合に、前記第1動作と前記第2動作とを交互に所定の周期で繰り返し実行する、
請求項2又は3に記載のロボット。
【請求項5】
前記制御部が、
前記頭部が前記載置面を押すことで前記胴体部の前端を前記載置面から前記第1距離だけ浮き上がらせた状態にするための角度である下方基準角度まで前記頭部を回転させる第1動作と、前記胴体部の前端を前記載置面から浮き上がっていない状態であって前記胴体部の前端と前記載置面との距離を前記第1距離よりも短い前記第2距離に戻した状態にするための角度である中央基準角度まで前記頭部を回転させる第2動作と、を交互に所定の周期で繰り返し実行するようにして前記第1制御を実行する、
請求項1から3のいずれか1項に記載のロボット。
【請求項6】
前記制御部が、
前記第2動作を行うことで、前記胴体部の底面が前記載置面と平行になるようにする、
請求項5に記載のロボット。
【請求項7】
前記制御部が、
前記第2動作を行うことで、前記胴体部の底面が前記載置面に接触するようにする、
請求項5に記載のロボット。
【請求項8】
前記外装は第1係合部と第2係合部を備え、
前記頭部は前記第1係合部を前記頭部に固定させる第1被係合部を備え、
前記胴体部は前記第2係合部を前記胴体部に固定させる第2被係合部を備え、
前記第1係合部と前記第1被係合部とが係合し、前記第2係合部と前記第2被係合部とが係合することにより、前記外装が前記筐体に係止する、
請求項2に記載のロボット。
【請求項9】
前記第1被係合部は、前記頭部を回転させる中心である前記接続位置に対して前側に位置し、
前記第1動作を行ったときに、前記第1被係合部が、前記接続位置の上方の前記頭部の上面よりも低い位置に移動し、前記外装が前記第1被係合部から前記頭部の上面を通り前記第2被係合部に至るまでの距離が、前記第2動作を行ったときよりも長くなることで、前記外装の上側が引っ張られた状態になる、
請求項8に記載のロボット。
【請求項10】
前記外装は前記第1係合部の特定範囲内に外装凸部を備え、
前記頭部は前記第1被係合部の特定範囲内に頭部凹部を備え、
前記外装凸部が前記頭部凹部に挿入されることにより前記外装凸部の位置が前記頭部凹部の位置に固定される、
請求項8に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット、ロボット制御方法及びプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
ロボットを、友達やペットのような親しみのある存在に近づけるように、その動作を制御する技術が知られている。例えば特許文献1には、胴体部、頭部、及び4つの足部を備え、胴体部に対して頭部や足部を駆動することによって、種々の生物的な動作を実行可能な犬型のロボットが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2002-239960号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に開示されているような従来のロボットは、このように、駆動する部位が比較的多いので、構成が複雑であり、生き物感を表現する動きをさせるのが難しかった。
【0005】
そこで、本発明はこのような事情に鑑みてなされたものであって、簡易な構成で生き物感を表現することができるロボット、ロボット制御方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
前記目的を達成するため、本発明に係るロボットの一態様は、
生物を模したロボットであって、
胴体部と、
前記胴体部の前端に接続された頭部と、
前記胴体部に対して前記頭部を動かすための可動部と、
制御部と、
を備え、
前記胴体部を載置面に置いた状態において、
前記制御部が、
前記頭部が前記載置面を押す状態が変化するように前記頭部を動かして、前記胴体部の前端と前記載置面との距離を第1距離と第2距離との間で交互に変化させるように前記可動部を制御する第1制御を実行する。
【発明の効果】
【0007】
本発明によれば、簡易な構成で生き物感を表現することができる。
【図面の簡単な説明】
【0008】
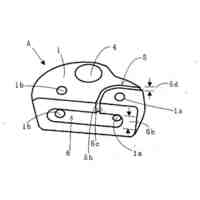
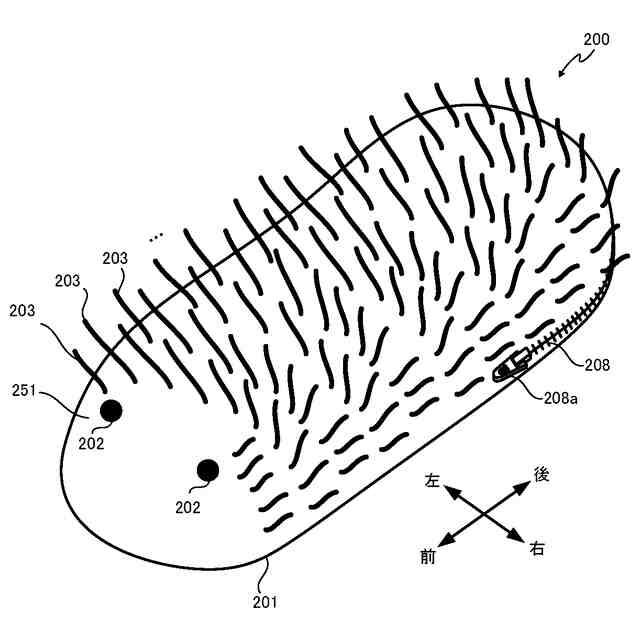
実施形態1に係るロボットの外観を示す斜視図である。
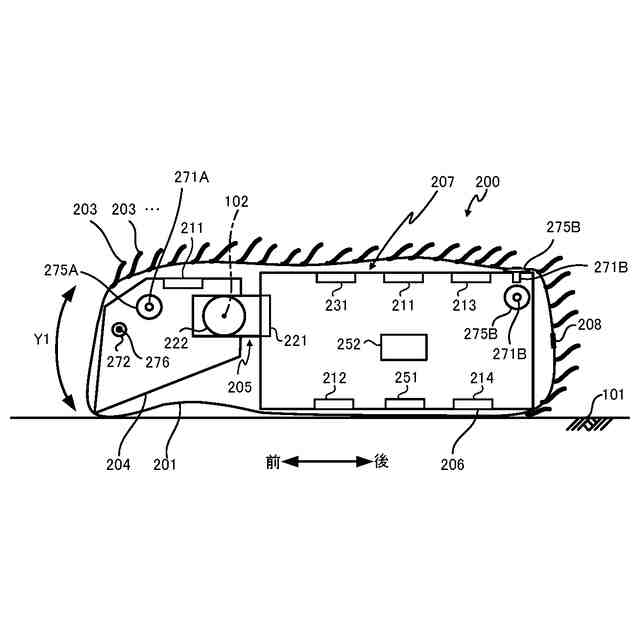
実施形態1に係るロボットの左右方向に直交する断面図である。
実施形態1に係るロボットの上下方向に直交する断面図である。
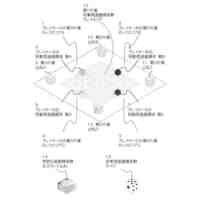
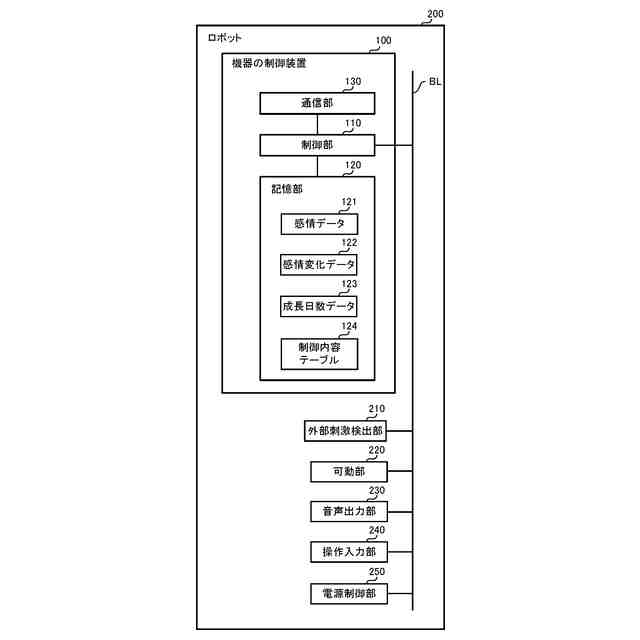
実施形態1に係るロボットの機能構成を示すブロック図である。
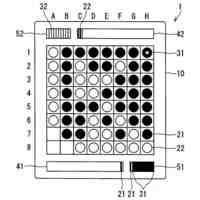
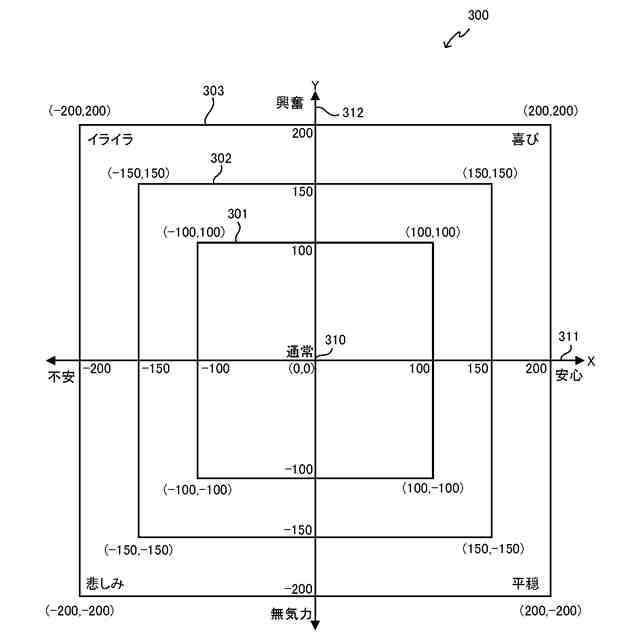
実施形態1に係る感情マップの一例を説明するための図である。
実施形態1に係る制御内容テーブルの一例を説明するための図である。
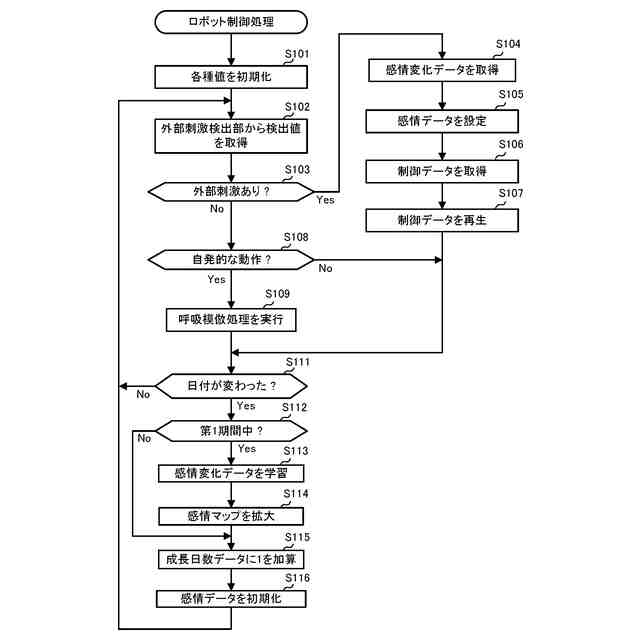
実施形態1に係るロボットのロボット制御処理の流れを示すフローチャートである。
実施形態1に係るロボットの呼吸模倣処理の流れを示すフローチャートである。
実施形態1に係るロボットの非充電時呼吸動作を説明するための図である。
実施形態1に係るロボットの非充電時呼吸動作を説明するための他の図である。
実施形態1に係るロボットの充電時呼吸動作を説明するための図である。
実施形態1に係るロボットの充電時呼吸動作を説明するための他の図である。
実施形態2に係るロボットの充電終了時動作処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について、図面を参照して説明する。なお、図中同一又は相当部分には同一符号を付す。
【0010】
(実施形態1)
実施形態1に係るロボット200は、図1に示すように、小型の動物を模したペットロボットである。なお、理解を容易にするため、図1には前後左右の方向を示しており、この方向を適宜参照しながら説明する。ロボット200は、前側に目を模した装飾部品202を2つ備える。また、図2、3に示すように、ロボット200は、筐体207と、筐体207を覆う柔軟性を有した外装201を備える。そして、外装201は、毛皮を模したもので、ふさふさの毛203を多数有している。なお、図2、3においては、図面の見やすさを考慮して、ハッチングを省略している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
玩具
1か月前
個人
運動補助具
12日前
個人
玩具
6か月前
個人
盤上遊戯具
6か月前
個人
フィギュア
6か月前
個人
ゲーム玩具
2か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
7か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
7か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ