TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025086776
公報種別
公開特許公報(A)
公開日
2025-06-09
出願番号
2023201059
出願日
2023-11-28
発明の名称
自転車トレーニング装置、トレーニングシステム、自転車、及び自転車トレーニング用プログラム
出願人
ヤマハ発動機株式会社
代理人
個人
,
個人
主分類
A63B
69/16 20060101AFI20250602BHJP(スポーツ;ゲーム;娯楽)
要約
【課題】簡単な構成で自転車トレーニングを可能にする。
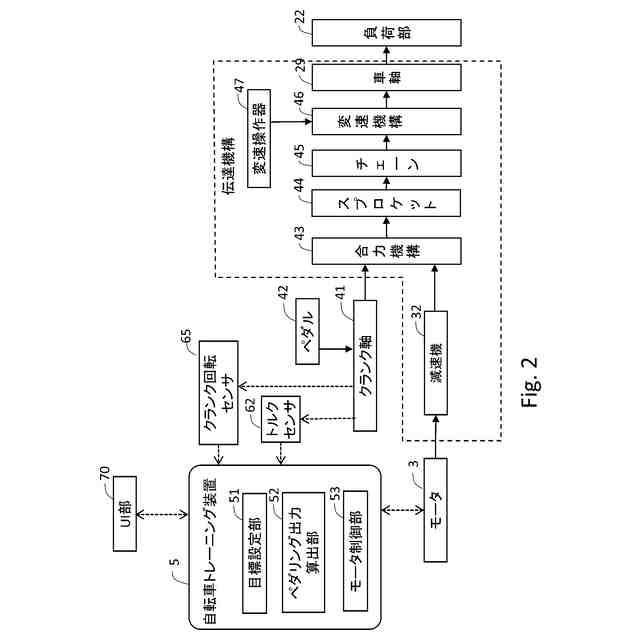
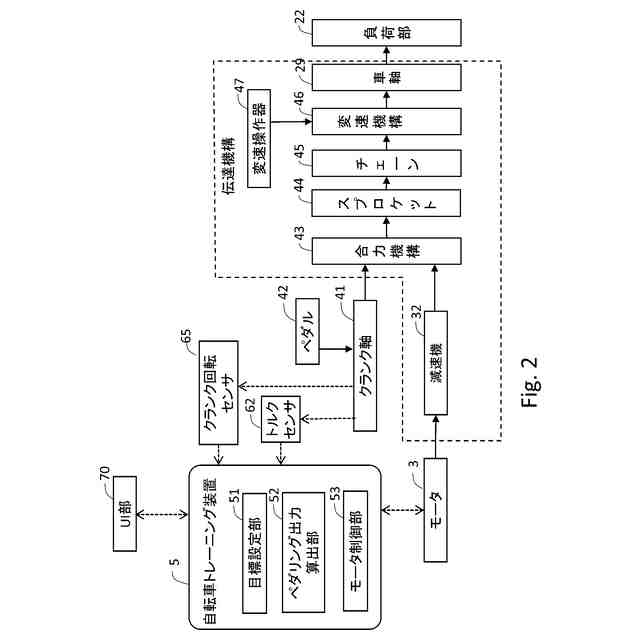
【解決手段】自転車トレーニング装置5は、ユーザの踏力により回転するクランク軸の回転をアシストするモータを制御するモータ制御部53と、ユーザの入力に基づき、目標値を設定する目標設定部51と、クランク軸の回転に対して負荷が付与された状態で、クランク軸に対する踏力トルクと、クランク軸のクランク回転数とを取得し、踏力トルクとクランク回転数に基づくペダリング出力値を算出する、ペダリング出力算出部52と、を備える。モータ制御部53は、ペダリング出力値が目標値を越える場合に、ペダリング出力値と目標値との差分に対応するアシスト力をモータ3に出力させる。
【選択図】図2
特許請求の範囲
【請求項1】
自転車トレーニング装置であって、
ユーザの踏力により回転するクランク軸の回転をアシストするモータを制御するモータ制御部と、
ユーザの入力に基づき、目標値を設定する目標設定部と、
前記クランク軸の回転に対して負荷が付与された状態で、前記クランク軸に対する踏力トルクと、前記クランク軸のクランク回転数とを取得し、前記踏力トルクと前記クランク回転数に基づくペダリング出力値を算出する、ペダリング出力算出部と、を備え、
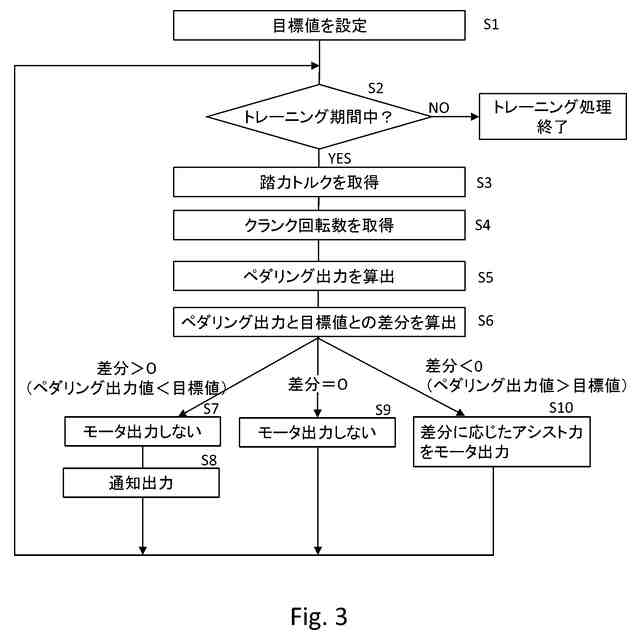
前記モータ制御部は、前記ペダリング出力値が前記目標値を越える場合に、前記ペダリング出力値と前記目標値との差分に対応するアシスト力を前記モータに出力させる、自転車トレーニング装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の自転車トレーニング装置であって、
前記モータ制御部は、前記ペダリング出力値が前記目標値を越えない場合に、前記モータによる前記クランク軸の回転のアシストを停止する、自転車トレーニング装置。
【請求項3】
請求項1又は2に記載の自転車トレーニング装置であって、
前記ペダリング出力値が前記目標値を越えない状態が所定時間継続した場合に、前記ユーザに対してペダリングが目標に達していないことを通知する、自転車トレーニング装置。
【請求項4】
請求項1又は2に記載の自転車トレーニング装置であって、
前記ペダリング出力値が前記目標値を越えない状態が所定時間継続した場合に、前記目標値を変更する、自転車トレーニング装置。
【請求項5】
請求項1又は2に記載の自転車トレーニング装置であって、
前記ペダリング出力値が前記目標値を越えない状態が所定時間継続し、且つ、前記クランク回転数が所定条件を満たす場合に、前記ユーザに対して変速操作の指示を通知する、自転車トレーニング装置。
【請求項6】
請求項1又は2に記載の自転車トレーニング装置を含むトレーニングシステムであって、
前記モータと、
前記クランク軸の回転の負荷となる負荷部と、
前記クランク軸の回転数を検出するクランク軸回転センサと、
前記クランク軸に対する踏力トルクを検出するトルクセンサと、
をさらに備えるトレーニングシステム。
【請求項7】
請求項6に記載のトレーニングシステムを含む自転車。
【請求項8】
ユーザの踏力により回転するクランク軸の回転をアシストするモータを制御するモータ制御処理と、
ユーザの入力に基づき、目標値を設定する目標設定処理と、
前記クランク軸の回転に対して負荷が付与された状態で、前記クランク軸に対する踏力トルクと、前記クランク軸のクランク回転数とを取得し、前記踏力トルクと前記クランク回転数に基づくペダリング出力値を算出する、ペダリング出力算出処理と、をコンピュータに実行させ、
前記モータ制御処理は、前記ペダリング出力値が前記目標値を越える場合に、前記ペダリング出力値と前記目標値との差分に対応するアシスト力を前記モータに出力させる処理を含む、自転車トレーニング用プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自転車トレーニングのための装置、システム、自転車、及びプログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特開2005-21391号公報(特許文献1)には、電動アシスト自転車と、電動アシスト自転車の前輪および後輪を回転可能に支持する専用台と、表示手段とを備えるバーチャルサイクリング装置が開示されている。電動アシスト自転車は、負荷制御手段と、走行情報生成手段とを有する。走行情報に対応して負荷制御情報が生成され、負荷制御手段に供給される。負荷制御手段によるペダルにかかる負荷の制御は、アシスト比率の制御および回生ブレーキ制御の少なくとも一方によってなされる。
【0003】
特開2004-331004号公報(特許文献2)には、フィットネスマシンとして利用することができる電動アシスト自転車が開示されている。この電動アシスト自転車は、後輪軸の変速ギア比を切り替える変速手段と、前輪軸にアシスト力を付与するアシスト駆動手段と、アシスト駆動手段に電源を供給するとともに、アシスト駆動手段に生じる回生電力を蓄積する電源部と、アシスト動作と回生動作とを制御するアシスト制御手段とを備える。変速手段による変速ギア比の制御とアシスト制御手段による回生ブレーキ制御によってペダルにかかる負荷を制御することで、フィットネス動作が実行される。
【先行技術文献】
【特許文献】
【0004】
特開2005-21391号公報
特開2004-331004号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来技術においては、ペダルにかかる負荷の制御のために、専用台又は回生ブレーキ等を用いる。そのため、装置又はシステムの構成が複雑になる。本願は、簡単な構成で自転車トレーニングを可能にする自転車トレーニング装置、システム、自転車及びプログラムを開示する。
【課題を解決するための手段】
【0006】
本発明の実施形態における自転車トレーニング装置は、ユーザの踏力により回転するクランク軸の回転をアシストするモータを制御するモータ制御部と、ユーザの入力に基づき、目標値を設定する目標設定部と、前記クランク軸の回転に対して負荷が付与された状態で、前記クランク軸に対する踏力トルクと、前記クランク軸のクランク回転数とを取得し、前記踏力トルクと前記クランク回転数に基づくペダリング出力値を算出する、ペダリング出力算出部と、を備える。前記モータ制御部は、前記ペダリング出力値が前記目標値を越える場合に、前記ペダリング出力値と前記目標値との差分に対応するアシスト力を前記モータに出力させる。
【図面の簡単な説明】
【0007】
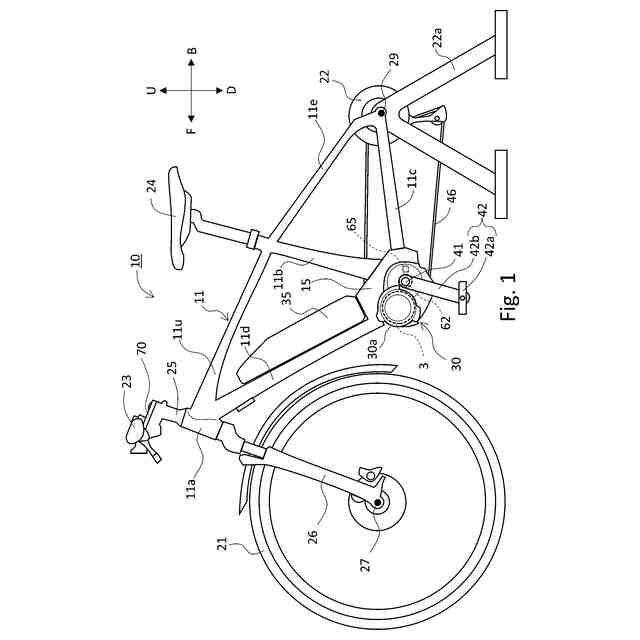
図1は、本実施形態における車両を示す左側面図である。
図2は、本実施形態における自転車トレーニング装置の構成例を示すブロック図である。
図3は、自転車トレーニング装置の動作例を示すフローチャートである。
【発明を実施するための形態】
【0008】
(構成1)
本発明の実施形態における自転車トレーニング装置は、ユーザの踏力により回転するクランク軸の回転をアシストするモータを制御するモータ制御部と、ユーザの入力に基づき、目標値を設定する目標設定部と、前記クランク軸の回転に対して負荷が付与された状態で、前記クランク軸に対する踏力トルクと、前記クランク軸のクランク回転数とを取得し、前記踏力トルクと前記クランク回転数に基づくペダリング出力値を算出する、ペダリング出力算出部と、を備える。前記モータ制御部は、前記ペダリング出力値が前記目標値を越える場合に、前記ペダリング出力値と前記目標値との差分に対応するアシスト力を前記モータに出力させる。
【0009】
上記構成1によれば、ユーザは、クランク軸に付与された負荷に抗ってペダリングし、踏力トルクとクランク回転数すなわちケイデンスに基づく出力値が目標値を越えた場合に、出力値と目標値の差分に対応するアシスト力がモータから出力される。そのため、ユーザのペダリング出力が、モータのアシストによって目標値に近づくよう調整される。ユーザは、踏力トルク及びケイデンスをモニタリングしなくても、トレーニングに適した出力でペダリングできる。そのため、ペダリングに集中できる。また、上記構成1では、クランク軸に付与された負荷に対するユーザのペダリング出力が目標値を越えた場合にモータがアシストする。そのため、モータによるアシスト機能を用いた簡単な構成により、自転車トレーニングが可能になる。
【0010】
クランク軸の回転に対する負荷の付与は、例えば、クランク軸の回転によって回転する回転体の回転抵抗によって実現することができる。クランク軸の回転に対する負荷の付与は、モータ以外の部材(負荷部)による負荷の付与である。一例として、クランク軸の回転が伝達される車軸の回転抵抗となる負荷装置、又は、車輪が負荷部となり得る。ここで、負荷は、回転に対する抵抗力である。クランク軸の回転に対して負荷が付与された状態は、負荷部によってクランク軸の前転(自転車を前進させる方向の回転)に対して抵抗力が発生する状態である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
玩具
29日前
個人
フィギュア
6か月前
個人
運動補助具
1日前
個人
玩具
5か月前
個人
盤上遊戯具
6か月前
個人
ゲーム玩具
2か月前
個人
球技用ベース
8か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ