TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025041402
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2023148676
出願日
2023-09-13
発明の名称
クレーンの制御システム、制御装置、及び制御方法
出願人
富士電機株式会社
代理人
個人
,
個人
主分類
B66C
13/48 20060101AFI20250318BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】作業効率を向上させる。
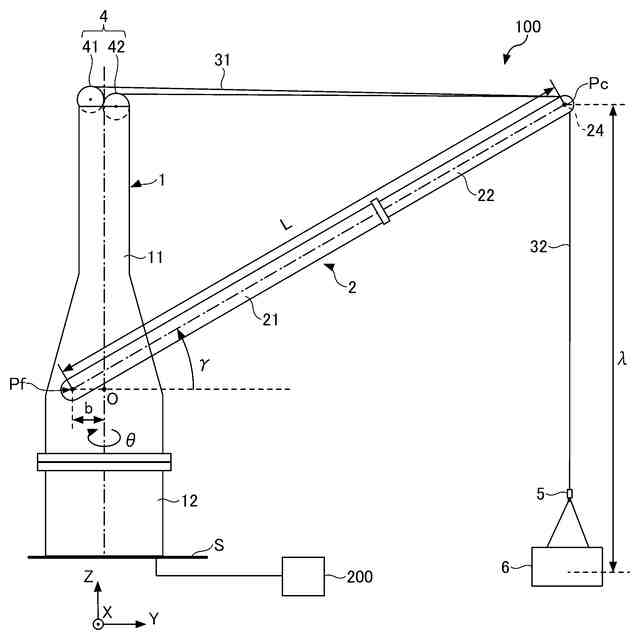
【解決手段】本開示の一態様に係るクレーンの制御システムは、伸縮及び起伏可能なブームと、前記ブームを接続すると共に旋回可能な支持部と、を有するクレーンと、前記クレーンを制御するための制御装置と、を備え、前記制御装置は、前記ブームの所定部を、目標地点まで移動させる際に、少なくとも前記ブームの伸縮制御及び旋回制御のうちいずれか一つ以上を行い、前記所定部が前記目標地点に到達可能でない場合、前記目標地点の高さ方向の座標を更新し、更新された前記座標を含む前記目標地点に到達させるために前記ブームの起伏制御を行うように構成されている。
【選択図】図1
特許請求の範囲
【請求項1】
伸縮及び起伏可能なブームと、前記ブームを接続すると共に旋回可能な支持部と、を有するクレーンと、
前記クレーンを制御するための制御装置と、を備え、
前記制御装置は、前記ブームの所定部を、目標地点まで移動させる際に、少なくとも前記ブームの伸縮制御及び旋回制御のうちいずれか一つ以上を行い、
前記所定部が前記目標地点に到達可能でない場合、前記目標地点の高さ方向の座標を更新し、更新された前記座標を含む前記目標地点に到達させるために前記ブームの起伏制御を行うように構成されている、
クレーンの制御システム。
続きを表示(約 1,400 文字)
【請求項2】
前記クレーンは、前記ブームの先端から下方向に延伸しているロープをさらに有し、
前記制御装置は、前記更新された高さ方向の前記座標に基づいて、前記ロープの巻き上げ又は巻き下げの制御を行う、
請求項1に記載のクレーンの制御システム。
【請求項3】
前記制御装置は、前記目標地点に、前記所定部を到達させるための前記ブームの長さを算出し、算出した前記長さに前記ブームを伸縮可能か否かに応じて、前記目標地点に前記所定部が到達可能か否かを判定する、
請求項1に記載のクレーンの制御システム。
【請求項4】
前記制御装置は、前記ブームが最も短くなっている時に、前記所定部をさらに旋回の中心方向に移動させる場合に、前記ブームを起こす制御を行うように構成されている、
請求項3に記載のクレーンの制御システム。
【請求項5】
前記制御装置は、前記ブームが最も長くなっている時に、前記所定部をさらに旋回の中心反対方向に移動させる場合に、前記ブームを伏せる制御を行うように構成されている、
請求項3に記載のクレーンの制御システム。
【請求項6】
前記制御装置は、前記所定部が前記目標地点まで移動する経路を生成し、当該経路に沿って複数の中継地点を設定し、
前記中継地点に移動する毎に、次の移動先の前記中継地点に、前記所定部が到達可能か否かを判定し、
到達可能でないと判定された場合に、次の移動先の前記中継地点の高さ方向の座標を更新し、更新された前記座標を含む、次の移動先の前記中継地点に到達させるために、前記ブームの起伏制御を行うように構成されている、
請求項1に記載のクレーンの制御システム。
【請求項7】
前記制御装置は、前記所定部の開始位置から前記目標地点まで直線状に移動させる前記経路を生成する、
請求項6に記載のクレーンの制御システム。
【請求項8】
前記制御装置は、前記中継地点に移動する毎に、次の移動先の前記中継地点に、前記所定部を到達させるための前記ブームの長さを算出し、算出した前記長さに前記ブームを伸縮可能か否かに応じて、次の移動先の前記中継地点に前記所定部が到達可能か否かを判定する、
請求項6に記載のクレーンの制御システム。
【請求項9】
前記制御装置は、二次元座標平面に含まれる方向を入力可能な入力装置からの信号に基づいて、前記目標地点を取得する、又は、入力された座標情報に基づいて、前記目標地点を取得する、
請求項1に記載のクレーンの制御システム。
【請求項10】
伸縮及び起伏可能なブームと、前記ブームを接続すると共に旋回可能な支持部と、を備えるクレーンを制御する制御装置であって、
前記ブームの所定部を、目標地点まで移動させる際に、少なくとも前記ブームの伸縮制御及び旋回制御のうちいずれか一つ以上を行う制御信号を前記クレーンに出力する出力制御部と、
前記所定部が前記目標地点に到達可能でない場合、前記目標地点の高さ方向の座標を更新する更新部と、を備え、
前記出力制御部は、更新された前記座標を含む前記目標地点に到達させるために前記ブームの起伏制御を行う制御信号を前記クレーンに出力する、
クレーンの制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、クレーンの制御システム、制御装置、及び制御方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来から、クレーンを用いて吊荷搬送を行う際に、搬送経路を設定する技術が提案されている。例えば、侵入禁止区域に侵入するのを回避するように搬送経路を設定する技術がある(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2021-147139号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1等の従来の技術は、障害物が設定された三次元接近禁止区域に吊り荷が接近するのを阻止するように、移動可能な範囲内で搬送経路を設定する技術であって、クレーンの構造を考慮して経路の設定を行う技術ではない。このため、クレーンのブームの構造的な制約により、経路に沿って吊り荷を移動させるのが難しい場合がある。
【0005】
本発明の一態様は、ブームの構造を考慮した制御を行うことで、作業効率の向上を実現する。
【課題を解決するための手段】
【0006】
本発明の一態様に係るクレーンの制御システムは、伸縮及び起伏可能なブームと、前記ブームを接続すると共に旋回可能な支持部と、を有するクレーンと、前記クレーンを制御するための制御装置と、を備え、前記制御装置は、前記ブームの所定部を、目標地点まで移動させる際に、少なくとも前記ブームの伸縮制御及び旋回制御のうちいずれか一つ以上を行い、前記所定部が前記目標地点に到達可能でない場合、前記目標地点の高さ方向の座標を更新し、更新された前記座標を含む前記目標地点に到達させるために前記ブームの起伏制御を行うように構成されている。
【発明の効果】
【0007】
本発明の一態様によれば、目標地点まで到達させるための制御を行うことで、作業効率を向上させる。
【図面の簡単な説明】
【0008】
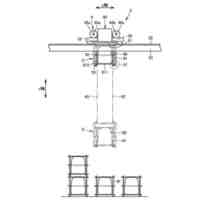
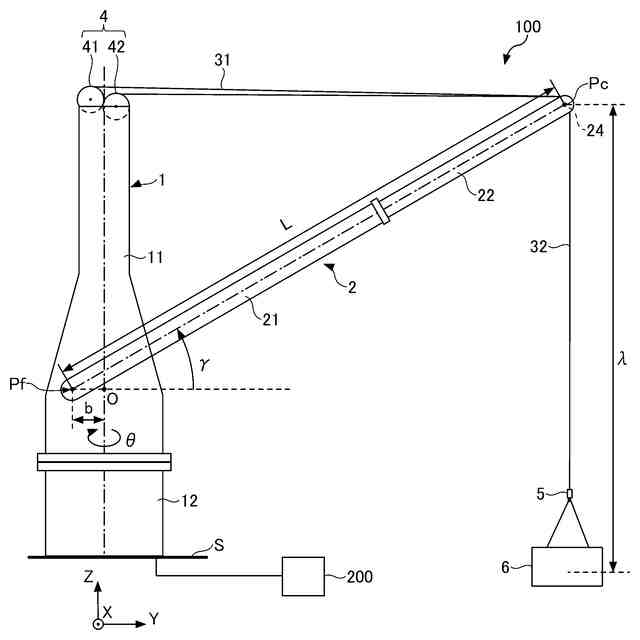
第1の実施形態に係るクレーンの側面図である。
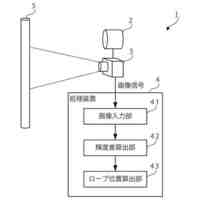
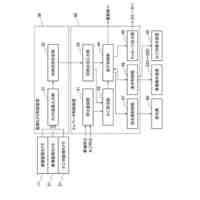
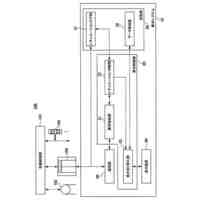
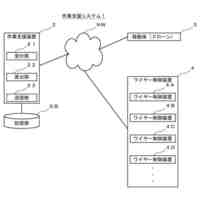
第1の実施形態に係るクレーンの制御システムの構成例を示した図である。
第1の実施形態に係る経路生成部により生成された移動経路を示した概念図である。
第1の実施形態に係る経路生成部により生成された移動経路をXY平面に示した概念図である。
第1の実施形態に係る座標設定部により設定された中継地点を例示した図である。
第1の実施形態に係る座標設定部により設定された中継地点を例示した図である。
第1の実施形態に係る座標更新部によって更新された後の中継地点を例示した図である。
第1の実施形態に係るPLCの演算部による処理手順を示したフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図面を参照して説明する。また、以下で説明する実施形態は、発明を限定するものではなく例示であって、実施形態に記述される全ての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。なお、各図面において同一の又は対応する構成には同一の又は対応する符号を付し、説明を省略することがある。
【0010】
以下、本発明の実施形態では、吊り荷を吊り上げながら当該吊り荷を移動させる作業機械の一例としてクレーンを用いる例について説明する。本実施形態では、クレーンの一例としてジブクレーンを用いる例について説明するが、クレーンを制限するものではなく、例えば、タワークレーン、又は、ロータリークレーン等であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
フジテック株式会社
行先階登録装置
1日前
株式会社小矢部精機
天井クレーン装置
1日前
株式会社明電舎
ワイヤーロープ検査装置および検査方法
1日前
東芝エレベータ株式会社
エレベータシステムおよびベビーカー専用運転方法
1日前
株式会社日立製作所
エレベーターの表示システム、および、表示制御方法
1日前
ジャパンエレベーターサービスホールディングス株式会社
ブレーキトルク値測定支援具およびブレーキトルク値測定方法
1日前
西武建設株式会社
作業支援システム、作業支援方法、及び作業支援プログラム
2日前
他の特許を見る

 特許ウォッチ
特許ウォッチ