TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025052719
公報種別
公開特許公報(A)
公開日
2025-04-07
出願番号
2023161570
出願日
2023-09-25
発明の名称
機器の制御装置、機器の制御方法、及び、プログラム
出願人
カシオ計算機株式会社
代理人
個人
主分類
A63H
30/02 20060101AFI20250328BHJP(スポーツ;ゲーム;娯楽)
要約
【課題】音に反応する機器を、より多様なパターンで動作させる。
【解決手段】機器の制御装置100は、機器であるロボット200の周囲の演奏音の特徴を判別し、ロボット200又はロボット200の周囲の状況を判別し、判別した演奏音の特徴に基づいて演奏音に連動した演奏連動動作をロボット200に実行させる際に、判別した状況を演奏連動動作に反映させる、制御部110を備える。
【選択図】図4
特許請求の範囲
【請求項1】
機器の周囲の演奏音の特徴を判別し、
前記機器の状況又は前記機器の周囲の状況を判別し、
前記判別した演奏音の特徴に基づいて前記演奏音に連動した演奏連動動作を前記機器に実行させる際に、前記判別した状況を前記演奏連動動作に反映させる、
制御部を備える、
ことを特徴とする機器の制御装置。
続きを表示(約 740 文字)
【請求項2】
前記制御部は、前記状況として、前記機器の疑似的な感情、疑似的な性格、バッテリーの残量、姿勢、場所、現在時刻、近傍に位置する同種の他の機器の状況、の少なくとも何れかを判別する、
ことを特徴とする請求項1に記載の機器の制御装置。
【請求項3】
前記制御部は、前記判別した状況に応じて、前記演奏連動動作の少なくともタイミングを変化させる、
ことを特徴とする請求項1又は2に記載の機器の制御装置。
【請求項4】
前記制御部は、前記判別した状況に応じて、前記演奏連動動作の動作量及び速度の少なくとも一方を変化させる、
ことを特徴とする請求項1又は2に記載の機器の制御装置。
【請求項5】
前記制御部は、前記演奏音の特徴として、前記演奏音のテンポを判別する、
ことを特徴とする請求項1又は2に記載の機器の制御装置。
【請求項6】
機器の周囲の演奏音の特徴を判別し、
前記機器又は前記機器の周囲の状況を判別し、
前記判別した演奏音の特徴に基づいて前記演奏音に連動した演奏連動動作を前記機器に実行させる際に、前記判別した状況を前記演奏連動動作に反映させる、
ことを特徴とする機器の制御方法。
【請求項7】
コンピュータに、
機器の周囲の演奏音の特徴を判別する処理、
前記機器又は前記機器の周囲の状況を判別する処理、
前記判別した演奏音の特徴に基づいて前記演奏音に連動した演奏連動動作を前記機器に実行させる際に、前記判別した状況を前記演奏連動動作に反映させる処理、
を実行させることを特徴とするプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、機器の制御装置、機器の制御方法、及び、プログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
音に反応して動作する玩具、ペット型ロボットなどの装置が知られている。例えば、特許文献1には、音センサによって検知された音をサンプリングして音量のリズムの変化を判断し、リズムの変化に従った動作パターンで動作部を動作させる動作装置について記載されている。
【先行技術文献】
【特許文献】
【0003】
特開平3-123581号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されている動作装置は、検知した音のリズムが一定であれば動作パターンは変化しないため、動作が単純になってしまい、ユーザに飽きられやすい面がある。
【0005】
本発明は上記実情に鑑みてなされたものであり、音に反応する機器を、より多様なパターンで動作させることができる機器の制御装置、機器の制御方法、及び、プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
前記目的を達成するため、本発明に係る機器の制御装置の一態様は、
機器の周囲の演奏音の特徴を判別し、
前記機器又は前記機器の周囲の状況を判別し、
前記判別した演奏音の特徴に基づいて前記演奏音に連動した連動動作を前記機器に実行させる際に、前記判別した状況を前記連動動作に反映させる、
制御部を備える、
ことを特徴とする。
【発明の効果】
【0007】
本発明によれば、音に反応する機器を、より多様なパターンで動作させることが可能となる。
【図面の簡単な説明】
【0008】
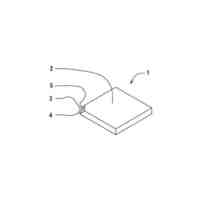
実施形態に係るロボットの外観を示す図である。
実施形態に係るロボットの側面から見た断面図である。
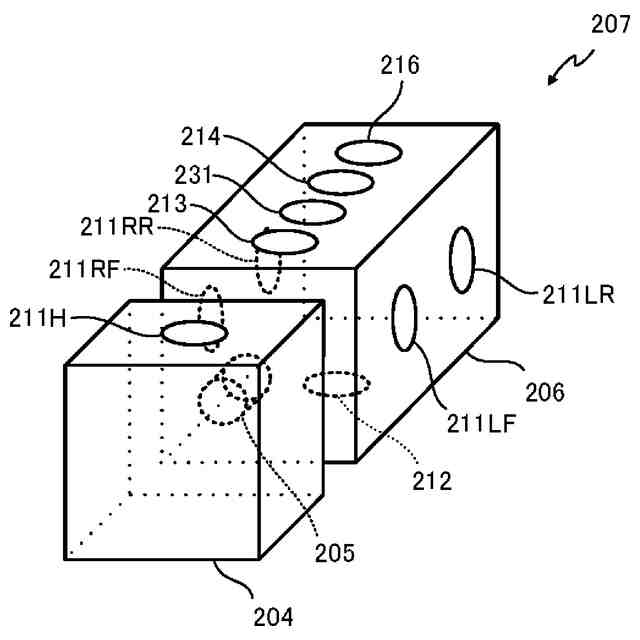
実施形態に係るロボットの筐体を説明するための図である。
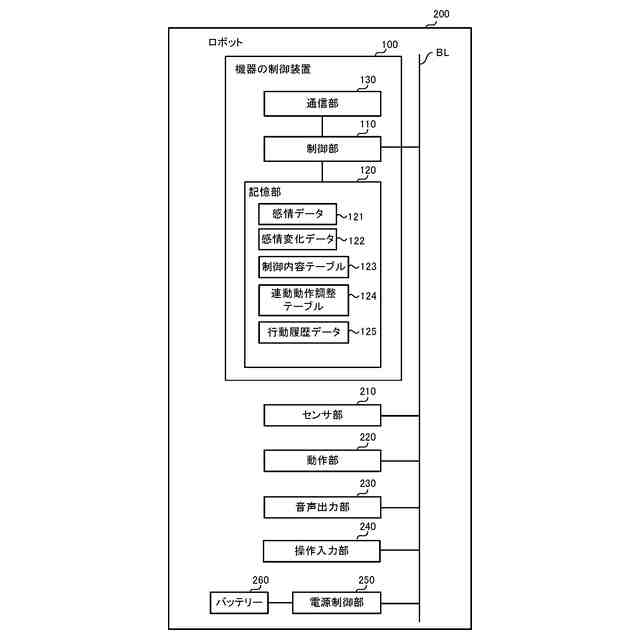
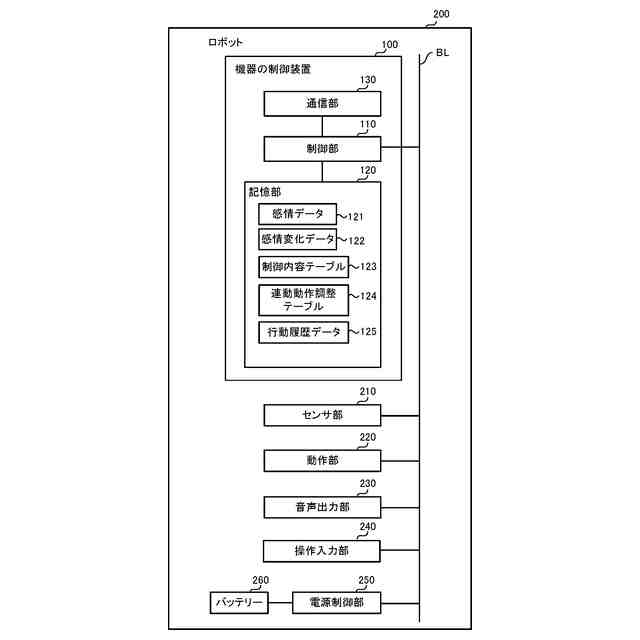
実施形態に係るロボットの機能構成を示すブロック図である。
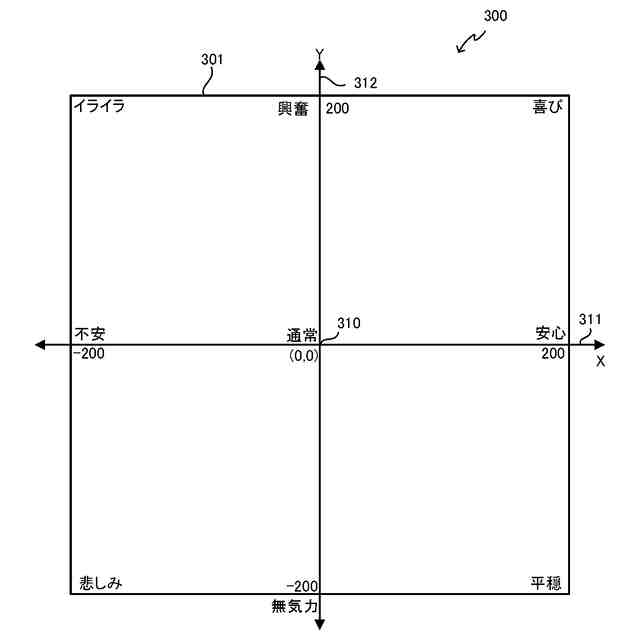
実施形態に係る感情マップの一例を説明する図である。
実施形態に係る制御内容テーブルの一例を説明する図である。
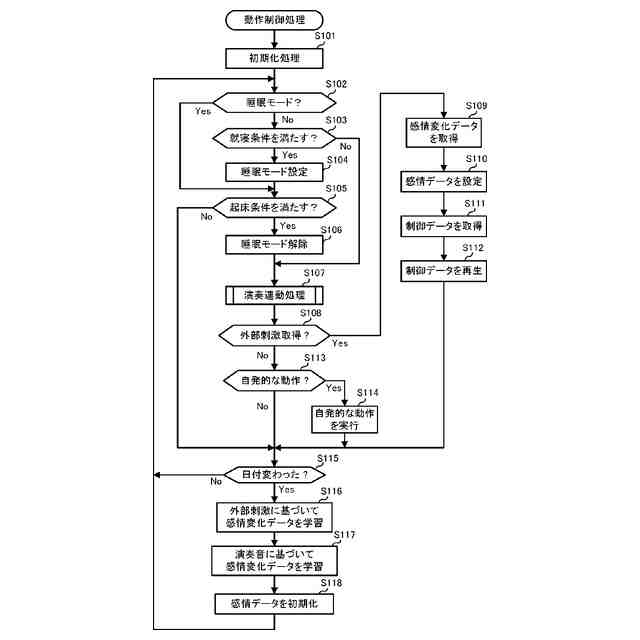
実施形態に係る動作制御処理のフローチャートである。
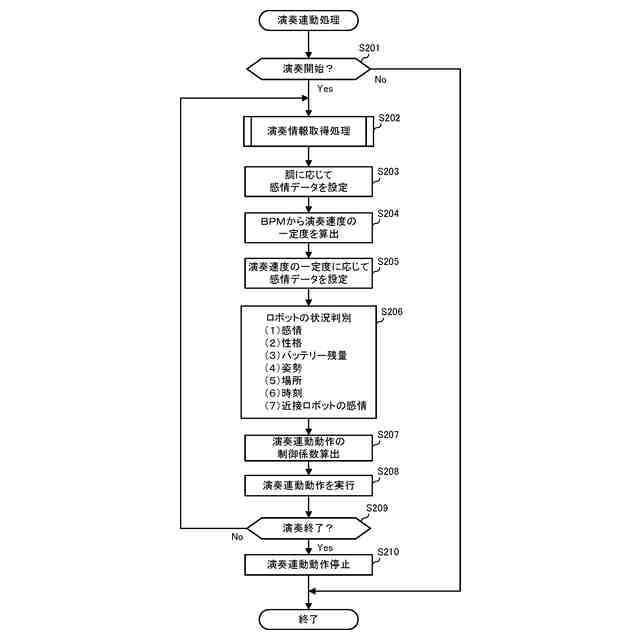
実施形態に係る演奏連動処理のフローチャートである。
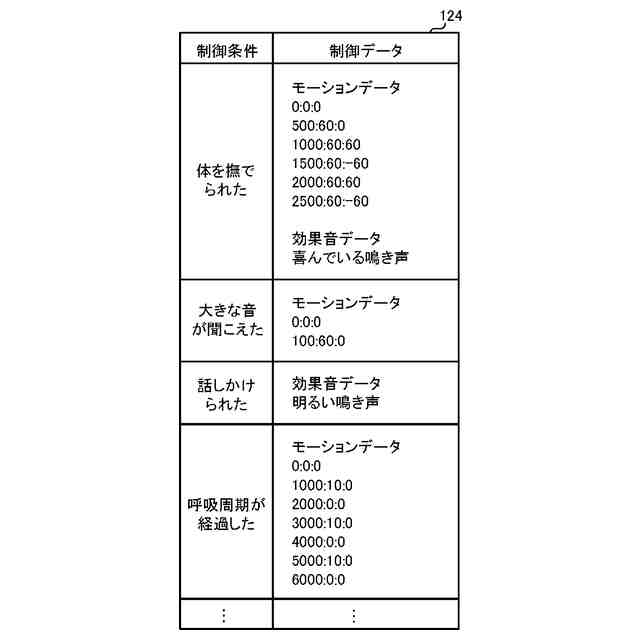
実施形態に係る連動動作調整テーブルの構成例である。
実施形態に係る演奏情報取得処理のフローチャートである。
変形例に係るロボット及び機器の制御装置の機能構成を示すブロック図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について、図面を参照して説明する。なお、図中同一又は相当部分には同一符号を付す。
【0010】
(実施形態)
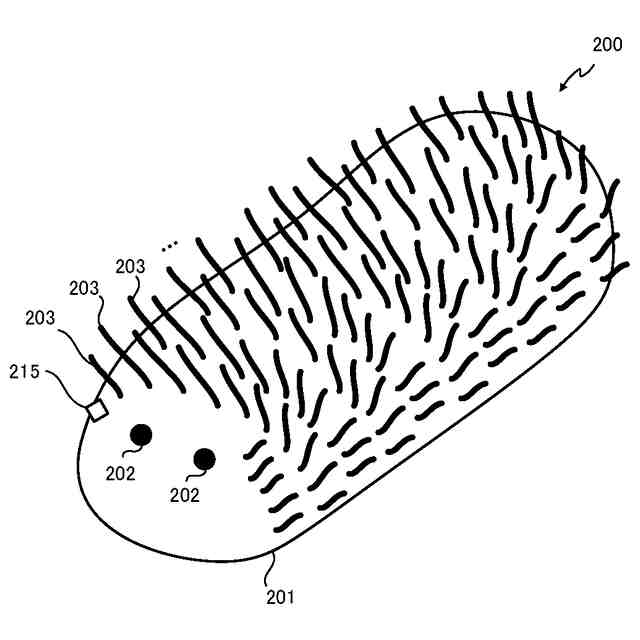
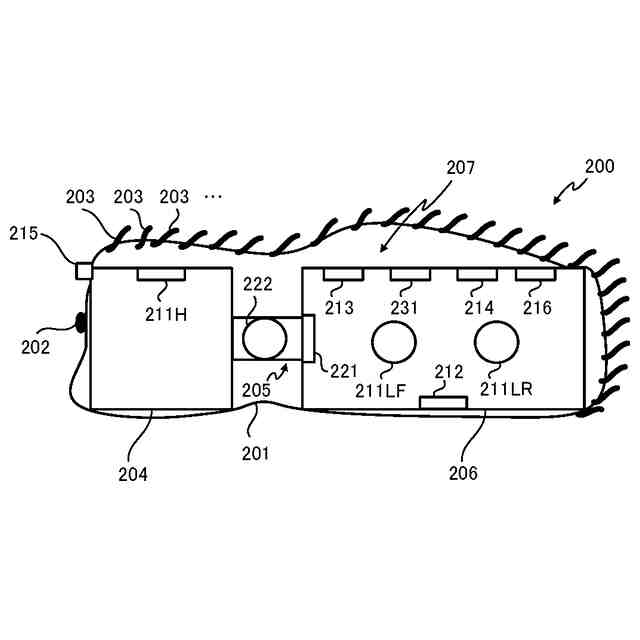
本発明における機器の制御装置を図1に示す演奏情報取得装置の一例であるロボット200に適用した実施形態について、図面を参照して説明する。図1に示すように、実施形態に係るロボット200は、小型の動物を模したペットロボットであり、目を模した装飾部品202及びふさふさの毛203を備えた外装201に覆われている。また、外装201の中には、ロボット200の筐体207が収納されている。図2に示すように、ロボット200の筐体207は、頭部204、連結部205及び胴体部206で構成され、頭部204と胴体部206とが連結部205で連結されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
玩具
2か月前
個人
フィギュア
2か月前
個人
盤上遊戯具
2か月前
個人
球技用ベース
4か月前
株式会社三共
遊技機
16日前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
16日前
株式会社三共
遊技機
16日前
株式会社三共
遊技機
16日前
株式会社三共
遊技機
16日前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
16日前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
個人
ロデオブランコ
3か月前
株式会社三共
遊技機
16日前
株式会社三共
遊技機
16日前
株式会社三共
遊技機
16日前
株式会社三共
遊技機
16日前
株式会社三共
遊技機
16日前
株式会社三共
遊技機
16日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ