TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025015390
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2024002616
出願日
2024-01-11
発明の名称
魚型ロボットシステム
出願人
先鋒材料科技股ふん有限公司
,
PIONEER MATERIAL PRECISION TECH CO., LTD.
代理人
個人
,
個人
,
個人
主分類
A63H
23/10 20060101AFI20250123BHJP(スポーツ;ゲーム;娯楽)
要約
【課題】おもむき及び使用者とのやり取りを有する魚型ロボットシステムの提供。
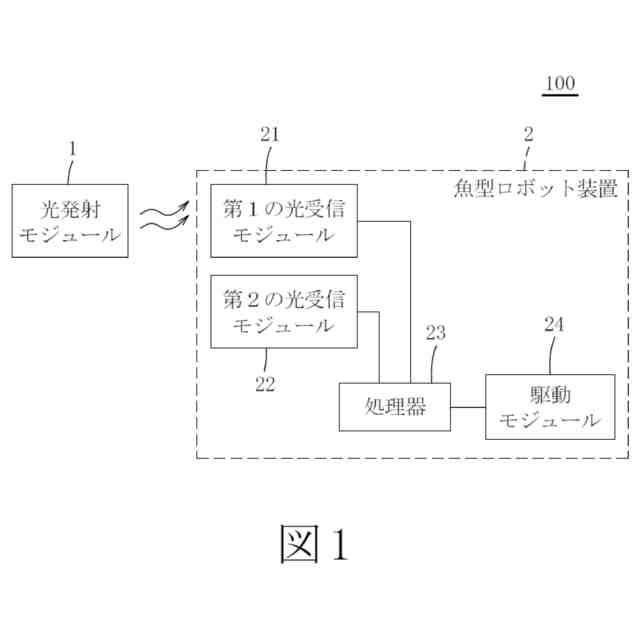
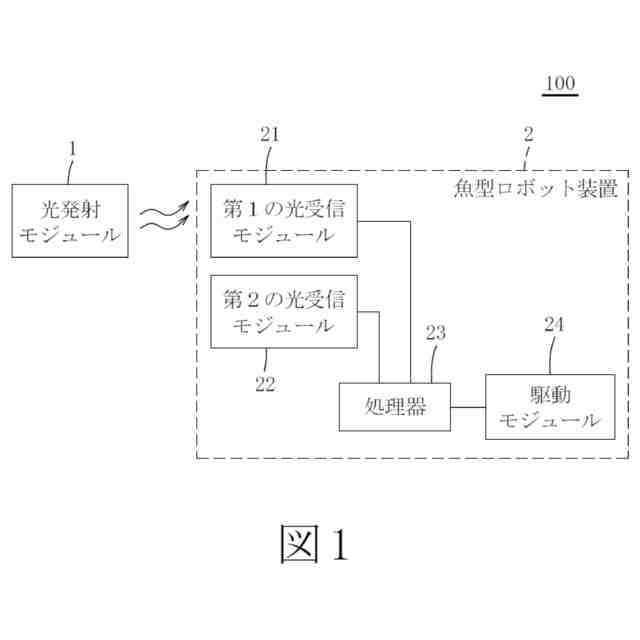
【解決手段】所定の閉鎖水域に設置され、連続的に光信号を発する光発射モジュール1と前記所定の閉鎖水域中を移動する魚型ロボット装置2とを含み、魚型ロボット装置2は、先頭端部と前記先頭端部から外側へ延伸し且つ光不透過性を有する板とを有するハウジングと、前記板の左側で前記先頭端部から外側へ露出する第1の光受信モジュール21と、前記板の右側で前記先頭端部から外側へ露出する第2の光受信モジュール22と、前記ハウジングを異なる移動モードにより移動させる駆動モジュール24と、第1の光受信モジュール21と第2の光受信モジュール22と駆動モジュール24とに電気的に接続されており、第1の光受信モジュール21及び第2の光受信モジュール22の光信号の受信状況により、移動モードを選んで駆動モジュール24を制御する処理器23とを含む。
【選択図】図1
特許請求の範囲
【請求項1】
水平面において境界における任意の1つの位置から前記境界における他の任意の1つの位置までの最大距離が12メートル以内である所定の閉鎖水域に使用する魚型ロボットシステムであって、
前記所定の閉鎖水域に設置されており、且つ、連続的に光信号を発するように構成されている光発射モジュールと、
前記所定の閉鎖水域中を移動することができるように配置されている魚型ロボット装置と、を含み、
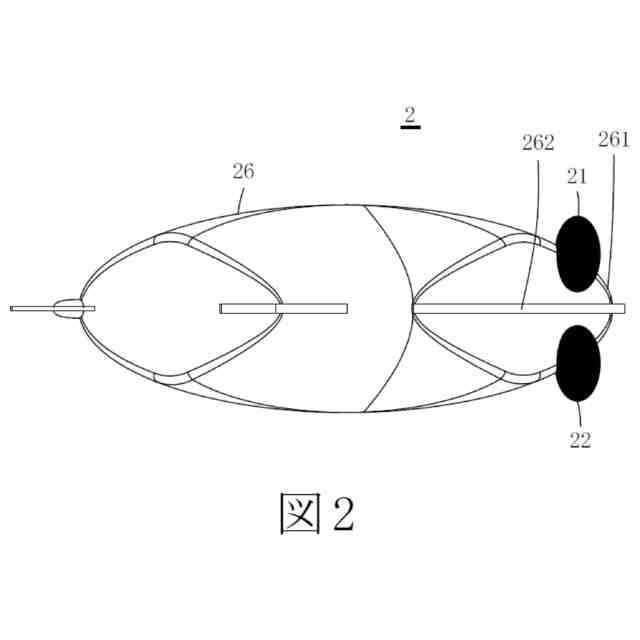
前記魚型ロボット装置は、先頭端部と、前記先頭端部から外側へ延伸し且つ光不透過性を有する板とを有するハウジングと、
前記板の左側に位置しながら外側へ露出するように前記ハウジングの前記先頭端部に設置されている第1の光受信モジュールと、
前記板の右側に位置しながら外側へ露出するように前記ハウジングの前記先頭端部に設置されている第2の光受信モジュールと、
前記ハウジングに設置されており、且つ、前記ハウジングをランダムモード、左に傾くモード、右に傾くモードまたは直行モードにより前記所定の閉鎖水域中を移動させることができるように構成されている駆動モジュールと、
前記第1の光受信モジュールと、前記第2の光受信モジュールと、前記駆動モジュールとに電気的に接続されていると共に前記ハウジングに設置されている処理器と、を含み、
また、前記処理器は、
前記第1の光受信モジュールのみが前記光信号を受信すると、前記左に傾くモードにより前記ハウジングを前記光発射モジュールに近づくよう移動させるように前記駆動モジュールを制御し、
前記第2の光受信モジュールのみが前記光信号を受信すると、前記右に傾くモードにより前記ハウジングを前記光発射モジュールに近づくよう移動させるように前記駆動モジュールを制御し、
前記第1の光受信モジュール及び前記第2の光受信モジュールのいずれも前記光信号を受信すると、前記直行モードにより前記ハウジングを前記光発射モジュールに近づくよう移動させるように前記駆動モジュールを制御し、且つ、
前記第1の光受信モジュール及び前記第2の光受信モジュールのいずれも前記光信号を受信していないと、前記ランダムモードにより前記ハウジングをランダムに移動させるように前記駆動モジュールを制御する、ように構成されている、ことを特徴とする魚型ロボットシステム。
続きを表示(約 1,000 文字)
【請求項2】
前記光発射モジュールは、赤外線を光信号として発する赤外線発射モジュールである、ことを特徴とする請求項1に記載の魚型ロボットシステム。
【請求項3】
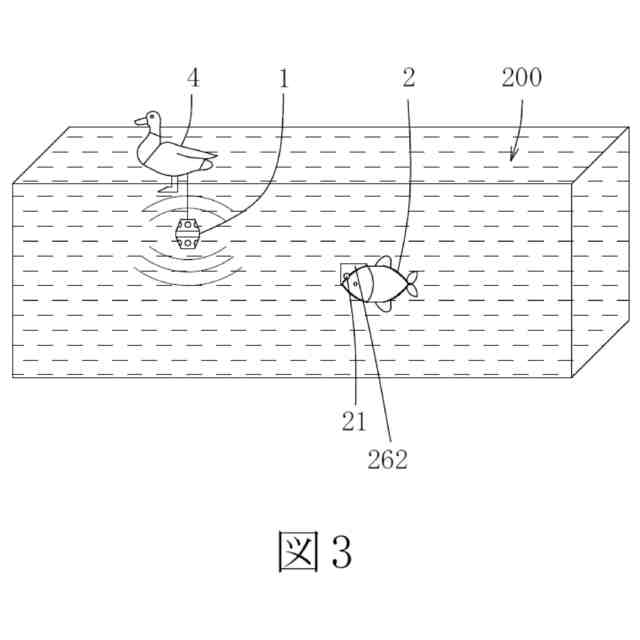
前記光発射モジュールは、前記所定の閉鎖水域中を移動できるオブジェクトに取り付けられている、ことを特徴とする請求項1に記載の魚型ロボットシステム。
【請求項4】
前記光発射モジュールは、前記所定の閉鎖水域内の固定位置に設置されている、ことを特徴とする請求項1に記載の魚型ロボットシステム。
【請求項5】
前記固定位置は、前記所定の閉鎖水域の境界の近くにある、ことを特徴とする請求項4に記載の魚型ロボットシステム。
【請求項6】
前記処理器は、受信した誘発信号に応じて前記駆動モジュールの前記制御を行う、ことを特徴とする請求項1に記載の魚型ロボットシステム。
【請求項7】
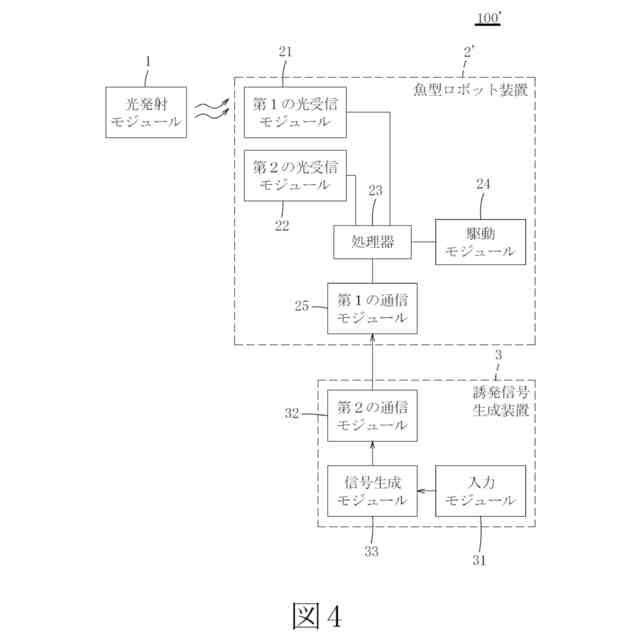
前記処理器に電気的に接続されており、且つ、所定の無線通信プロトコルにより外部からの前記誘発信号を受信して、該誘発信号を前記処理器に送信するように構成されている第1の通信モジュールを更に含む、ことを特徴とする請求項6に記載の魚型ロボットシステム。
【請求項8】
前記所定の無線通信プロトコルにより前記第1の通信モジュールと信号的に接続されている第2の通信モジュールと、
手動の操作で入力信号を生成する入力モジュールと、
前記第2の通信モジュールと前記入力モジュールとに電気的に接続されており、且つ、前記入力モジュールが生成する入力信号に基づいて前記誘発信号を生成して、前記第2の通信モジュールに送信するように構成されている信号生成モジュールと、を有する誘発信号生成装置を更に含み、
前記第2の通信モジュールは、前記所定の無線通信プロトコルにより、前記信号生成モジュールが生成する前記誘発信号を前記第1の通信モジュールに送信するように構成されている、ことを特徴とする請求項7に記載の魚型ロボットシステム。
【請求項9】
前記誘発信号生成装置は、前記第1の通信モジュールの受信範囲内に固定されるように設置されている、ことを特徴とする請求項8に記載の魚型ロボットシステム。
【請求項10】
前記誘発信号生成装置は、モバイル電子装置である、ことを特徴とする請求項8に記載の魚型ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、魚型ロボットシステムに関し、特に人とやり取りできておもむきを有する魚型ロボットシステムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
現有の生物模倣ロボット装置(例えば、犬型ロボット、ヒト型ロボット、猫型ロボットなど)が採用する測位システムは、例えば特許文献1で使用される全地球測位システム(GPS)、超広帯域無線システム(UWB)などが挙げられる。しかし、上記の測位システムを水中に応用すると、水の伝導特性により測位信号の伝送の精確性が影響される。
【0003】
また、GPSは、一般的に2メートル~3メートルの誤差があるので、それよりかなり広い区域にしか適用できず、そして、生物模倣ロボット装置を区域の一側から反対側に移動させるといった正確な制御を行う場合更に広い範囲が必要になり、例えば魚型ロボットを池の左側から池の右側に移動させる場合、左右に12メートル超えの最大幅を有する区域を用意しなければ、精確に移動させることができない。
【先行技術文献】
【特許文献】
【0004】
特許第6843248号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
従って、上記の測位システムを使用せずに、水中に使用する生物模倣ロボット装置からおもむき及び使用者とのやり取りを生み出すことは、関連分野において解決しようとする課題である。
【0006】
本発明の目的は、使用する時におもむき及び使用者とのやり取りを有する魚型ロボットシステムを提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成すべく、本発明は、水平面において境界における任意の1つの位置から前記境界における他の任意の1つの位置までの最大距離が12メートル以内である所定の閉鎖水域に使用する魚型ロボットシステムであって、
前記所定の閉鎖水域内に設置されており、且つ、連続的に光信号を発するように構成されている光発射モジュールと、
前記所定の閉鎖水域中を移動することができるように配置されている魚型ロボット装置と、を含み、
前記魚型ロボット装置は、先頭端部と、前記先頭端部から外側へ延伸し且つ光不透過性を有する板とを有するハウジングと、
前記板の左側に位置しながら外側へ露出するように前記ハウジングの前記先頭端部に設置されている第1の光受信モジュールと、
前記板の右側に位置しながら外側へ露出するように前記ハウジングの前記先頭端部に設置されている第2の光受信モジュールと、
前記ハウジングに設置されており、且つ、ランダムモード、左に傾くモード、右に傾くモードまたは直行モードにより前記所定の閉鎖水域中に移動することができるように構成されている駆動モジュールと、
前記第1の光受信モジュールと、前記第2の光受信モジュールと、前記駆動モジュールとに電気的に接続されていると共に前記ハウジングに設置されている処理器と、を含み、
また、前記処理器は、
前記第1の光受信モジュールのみが前記光信号を受信すると、前記左に傾くモードにより前記ハウジングを前記光発射モジュールに近づくよう移動させるように前記駆動モジュールを制御し、
前記第2の光受信モジュールのみが前記光信号を受信すると、前記右に傾くモードにより前記ハウジングを前記光発射モジュールに近づくよう移動させるように前記駆動モジュールを制御し、
前記第1の光受信モジュール及び前記第2の光受信モジュールいずれも前記光信号を受信すると、前記直行モードにより前記ハウジングを前記光発射モジュールに近づくよう移動させるように前記駆動モジュールを制御し、且つ、
前記第1の光受信モジュール及び前記第2の光受信モジュールいずれも前記光信号を受信していないと、前記ランダムモードにより前記ハウジングをランダムに移動させるように前記駆動モジュールを制御する、ように構成されている、ことを特徴とする魚型ロボットシステムを提供する。
【発明の効果】
【0008】
本発明の魚型ロボットシステムは、光発射モジュールが所定の閉鎖水域内に設置される位置は限定されず、使用者が光発射モジュールを移動するものに設置してもよくまたは固定するものに設置してもよく、そして、処理器が第1の光受信モジュール及び第2の光受信モジュールの光発射モジュール1からの光信号に対する受信状況に基づいて、駆動モジュールを制御して、魚型ロボット装置を移動するまたは固定された光発射モジュールに接近させることにより、従来の測位システムを使用せずに、使用する時におもむき及び使用者とのやり取りを生み出すことができる。
【図面の簡単な説明】
【0009】
本発明の魚型ロボットシステムの第1の実施形態を示すブロック図である。
上記の第1の実施形態における魚型ロボット装置を示す上視図である。
上記の第1の実施形態の魚型ロボットシステム及び移動できるオブジェクトが設置されている所定の閉鎖水域を示す図である。
本発明の魚型ロボットシステムの第2の実施形態を示すブロック図である。
上記の第2の実施形態の魚型ロボットシステム、及び、第2の実施形態における魚型ロボット装置と光発射モジュールとが設置されている所定の閉鎖水域を示す図である。
【発明を実施するための形態】
【0010】
本発明の実施形態の目的、技術手段、及び利点をより明確に説明するために、以下、本発明の実施形態の添付図面を組み合わせて、本発明の実施形態における技術手段に対して明確且つ完全に説明する。説明する実施形態は、本発明の一部の実施形態であり、すべての実施形態ではないことが明らかであろう。通常、添付図面に描きまた示す本発明の実施形態の部品は各種異なる配置で布置及び設計することができる。従って、以下、添付図面中に提供した本発明の実施形態の詳細説明は、本発明の保護範囲に対していかなる制限も構成せず、単に本発明の選択された実施形態を示すのみである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
盤上遊戯具
22日前
個人
玩具
16日前
個人
フィギュア
26日前
個人
球技用ベース
2か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
2か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
4か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ