TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025013113
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023207863
出願日
2023-12-08
発明の名称
鳥型ロボット装置
出願人
先鋒材料科技股ふん有限公司
,
PIONEER MATERIAL PRECISION TECH CO., LTD.
代理人
個人
,
個人
,
個人
主分類
A63H
13/02 20060101AFI20250117BHJP(スポーツ;ゲーム;娯楽)
要約
【課題】自律的に泳げる鳥型ロボット装置を提供する。
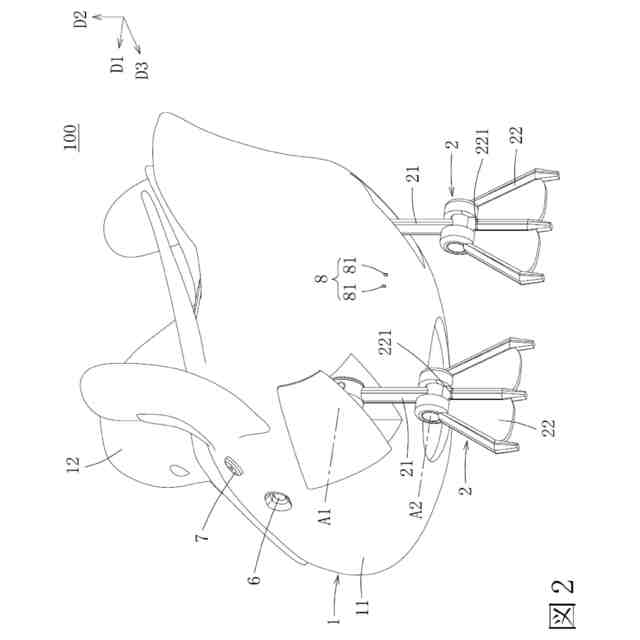
【解決手段】鳥の頭及び胴体を模した外部形状を有する鳥形の筐体1と、鳥形の筐体1の下部に配置される2つの脚構造2と、2つの脚構造2を駆動する駆動モジュールと、を備え、各2つの脚構造2は、いずれも回転できるように鳥形の筐体1に取り付けられる第1の部分21と、第1の部分21に枢支される第2の部分22と、を有し、且つ、駆動モジュールからの駆動によって、第1の部分21が前方側へ延伸し、第2の部分22が第1の部分21から前後方向D3の後方側へ延伸する曲げ姿勢と、第1の部分21が後方側へ延伸し、第2の部分22が第1の部分21から更に前後方向D3の後方側へ延伸する伸び姿勢と、の間に切り替える動きを行うことができる。
【選択図】図2
特許請求の範囲
【請求項1】
鳥の頭及び胴体を模した外部形状を有すると共に、前記頭及び胴体の位置関係により、左右方向と上下方向と前後方向とが定義される鳥形の筐体と、
前記左右方向に沿って並列するように前記鳥形の筐体の前記上下方向における下部に配置される2つの脚構造と、
前記鳥形の筐体内に配置されると共に、前記2つの脚構造の前記鳥形の筐体に対する相対移動を駆動する駆動モジュールと、を備えた鳥型ロボット装置であって、
各前記脚構造は、前記左右方向に平行する第1の回転軸で回転できるように前記鳥形の筐体に取り付けられる第1の部分と、前記左右方向に平行する第2の回転軸で回転できるように前記第1の部分に枢支される第2の部分と、を有することにより、前記駆動モジュールからの駆動によって、
前記第1の部分が前記鳥形の筐体から前記前後方向の前方側へ延伸し、前記第2の部分が前記第1の部分から前記前後方向の後方側へ延伸する曲げ姿勢と、
前記第1の部分が前記鳥形の筐体から前記前後方向の後方側へ延伸し、前記第2の部分が前記第1の部分から更に前記前後方向の後方側へ延伸する伸び姿勢と、の間に切り替える動きを行うことができるように構成されたことを特徴とする鳥型ロボット装置。
続きを表示(約 1,700 文字)
【請求項2】
前記曲げ姿勢において、前記第1の部分は前記鳥形の筐体から前記前後方向の前方側、且つ、前記上下方向の下方側へ斜めに延伸し、前記第2の部分は前記第1の部分から前記前後方向の後方側へ延伸し、
前記伸び姿勢において、前記第1の部分は前記鳥形の筐体から前記前後方向の後方側、且つ、前記上下方向の下方側へ斜めに延伸することを特徴とする請求項1に記載の鳥型ロボット装置。
【請求項3】
各前記脚構造が有する前記第1の部分もしくは前記第2の部分には、前記第1の部分に枢支される前記第2の部分の前記第1の部分に対する相対回転角度を制限する第1の位置制限手段と第2の位置制限手段とが配置されており、
前記第1の位置制限手段は、前記第2の部分の前記第1の部分に対する相対回転角度の下限を決定し、前記第2の位置制限手段は前記第2の部分の前記第1の部分に対する相対回転角度の上限を決定することを特徴とする請求項2に記載の鳥型ロボット装置。
【請求項4】
前記駆動モジュールは、前記2つの脚構造がそれぞれ有する前記第1の部分の前記第1の回転軸における前記鳥形の筐体に対する回転を駆動する2つの第1の駆動手段を有することを特徴とする請求項1に記載の鳥型ロボット装置。
【請求項5】
前記鳥形の筐体は、鳥の胴体を模した外部形状を有する胴体部と、鳥の頭を模した外部形状に形成されていると共に、回転可能に前記胴体部に取り付けられる頭部とを有するように構成されており、
前記駆動モジュールは、前記頭部の前記胴体部に対する回転を駆動する第2の駆動手段を有することを特徴とする請求項1に記載の鳥型ロボット装置。
【請求項6】
前記鳥形の筐体に配置されて外部の画像を撮影して対応する画像データを生成する撮影モジュールと、
前記撮影モジュール及び前記駆動モジュールに電気的に接続するマイクロコンピュータとを更に備え、
前記マイクロコンピュータは顔認識機能を有し、前記撮影モジュールにより撮影された画像データを前記顔認識機能で処理することにより対応の制御コマンドを前記駆動モジュールに出力するように構成されていることを特徴とする請求項1に記載の鳥型ロボット装置。
【請求項7】
前記鳥形の筐体に配置されて隣接する物体との距離を検知して対応の距離感知データを生成する複数の距離センサーと、各前記距離センサー及び前記駆動モジュールに電気的に接続するマイクロコンピュータとを更に備え、
前記マイクロコンピュータは各前記距離センサーからの前記距離感知データに基づいて対応の回避コマンドを前記駆動モジュールに出力するように構成されていることを特徴とする請求項1に記載の鳥型ロボット装置。
【請求項8】
前記鳥形の筐体に配置されて前記マイクロコンピュータに電気的に接続することにより、受信した音声を対応する音声データを生成して前記マイクロコンピュータに出力する複数の音声受信手段と、
前記鳥形の筐体に配置されて前記マイクロコンピュータに電気的に接続するスピーカーと、を更に備え、
前記マイクロコンピュータは、各前記音声データに基づいて対応の制御コマンドを前記駆動モジュールに出力し、且つ、前記スピーカーを制御して予め録音されたオーディオデータを再生させることができるように構成されることを特徴とする請求項6に記載の鳥型ロボット装置。
【請求項9】
前記鳥形の筐体の下部に配置されて前記マイクロコンピュータに電気的に接続することにより、水面から離れたことを感知すると前記マイクロコンピュータに離水信号を出力する水センサーを更に備え、
前記マイクロコンピュータが前記水センサーから前記離水信号を受信すると、前記撮影モジュールにより撮影された画像データを前記顔認識機能で処理した結果に基づいて、前記駆動モジュールに前記脚構造を動かせたり前記スピーカーにアラートを再生させたりするよう構成されることを特徴とする請求項8に記載の鳥型ロボット装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は動物を模倣した装置に関し、特に、鳥型ロボット装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
お風呂に入ったり、プールで遊んだりするときに、水に浮くアヒルのおもちゃをよく見かけるが、この種のアヒルのおもちゃは水の流れに乗って浮くだけで、水面上で自律的に泳いだりその他の動作を行うことはできない欠点がある。したがって、アヒルのおもちゃを自律的に泳ぐようにする方法や、アヒルのおもちゃとユーザーのインタラクションをより良くする方法は探求に値する。
【先行技術文献】
【特許文献】
【0003】
中国特許出願公開第115465383号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
従って、本発明は従来技術の少なくとも1つの欠点を解決する鳥型ロボット装置の提供を目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成すべく、本発明は、鳥の頭及び胴体を模した外部形状を有すると共に、前記頭及び胴体の位置関係により、左右方向と上下方向と前後方向とが定義される鳥形の筐体と、
前記左右方向に沿って並列するように前記鳥形の筐体の前記上下方向における下部に配置される2つの脚構造と、
前記鳥形の筐体内に配置されると共に、前記2つの脚構造の前記鳥形の筐体に対する相対移動を駆動する駆動モジュールと、を備えた鳥型ロボット装置であって、
各前記脚構造は、前記左右方向に平行する第1の回転軸で回転できるように前記鳥形の筐体に取り付けられる第1の部分と、前記左右方向に平行する第2の回転軸で回転できるように前記第1の部分に枢支される第2の部分と、を有することにより、前記駆動モジュールからの駆動によって、
前記第1の部分が前記鳥形の筐体から前記前後方向の前方側へ延伸し、前記第2の部分が前記第1の部分から前記前後方向の後方側へ延伸する曲げ姿勢と、
前記第1の部分が前記鳥形の筐体から前記前後方向の後方側へ延伸し、前記第2の部分が前記第1の部分から更に前記前後方向の後方側へ延伸する伸び姿勢と、の間に切り替える動きを行うことができるように構成されたことを特徴とする鳥型ロボット装置を提供する。
【発明の効果】
【0006】
本発明の鳥型ロボット装置は、鳥形の筐体に対して曲げ姿勢と伸び姿勢との間に切り替える動きを行うことができる2つの脚構造と、この2つの脚構造を駆動する駆動モジュールとを有することにより、水面上で自律的に泳ぐことができる。
【図面の簡単な説明】
【0007】
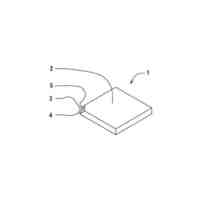
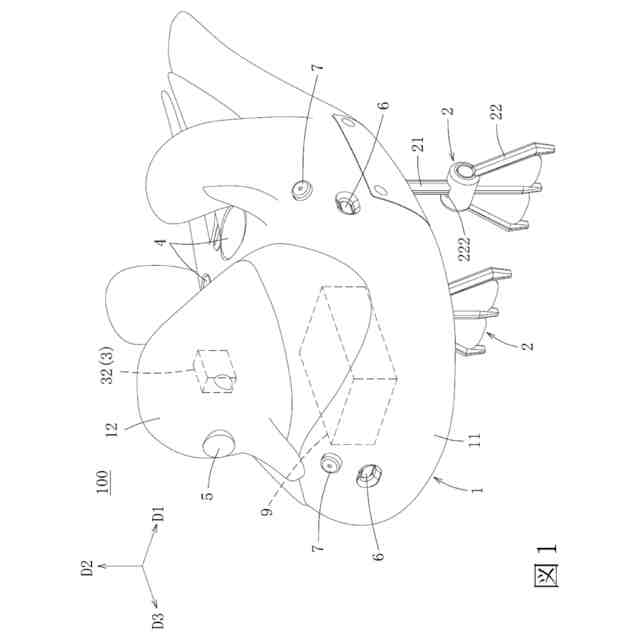
本発明の鳥型ロボット装置の実施例の斜視図である。
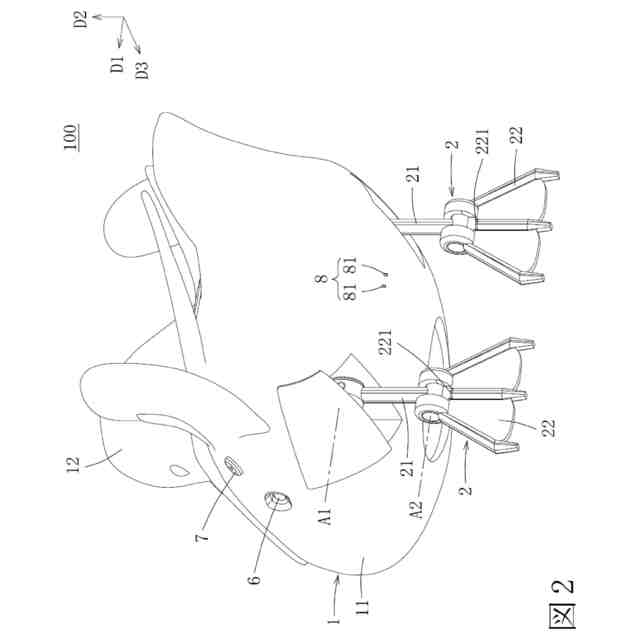
同実施例の他の角度の斜視図である。
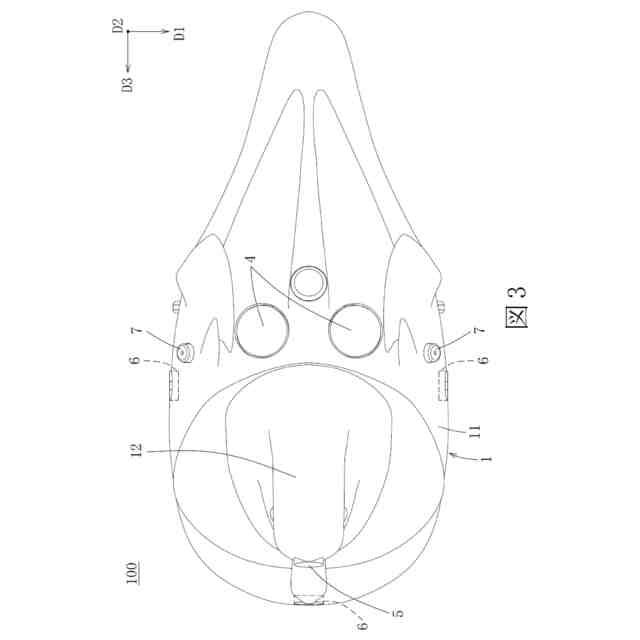
同実施例の上面図である。
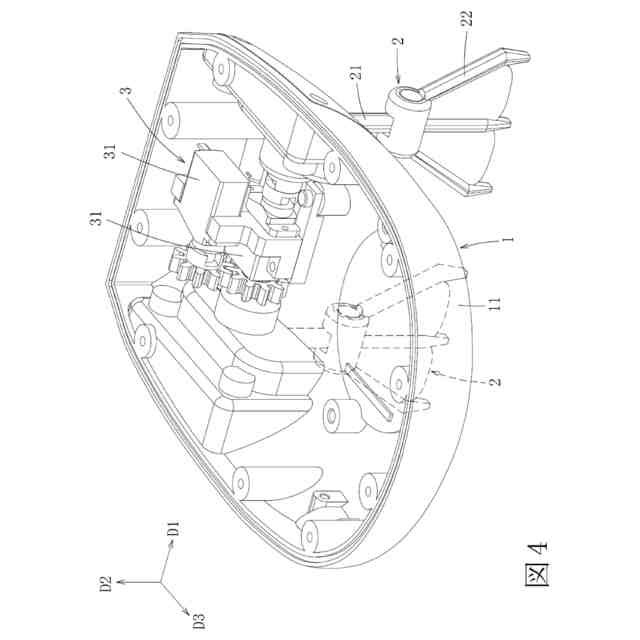
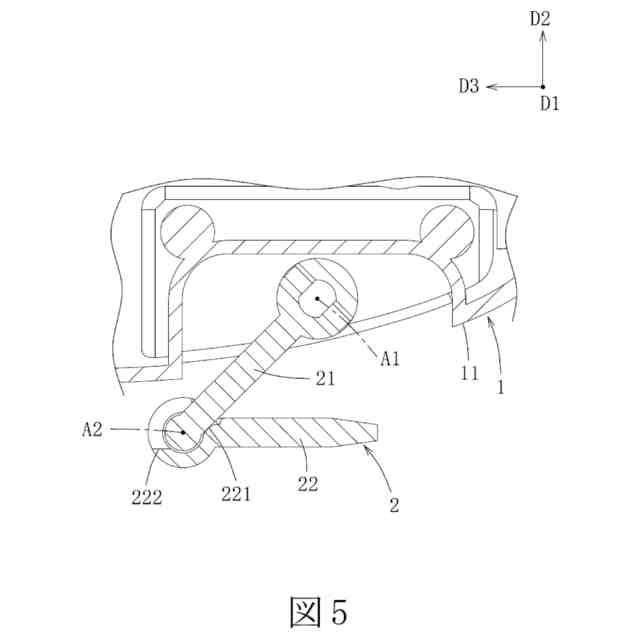
同実施例の一部断面斜視図である。
同実施例における脚構造の曲げ姿勢の断面図である。
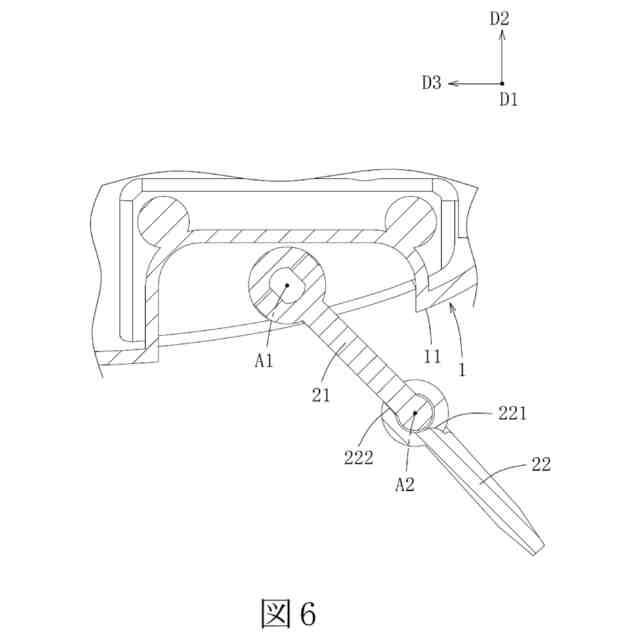
同実施例における脚構造の伸び姿勢の断面図である。
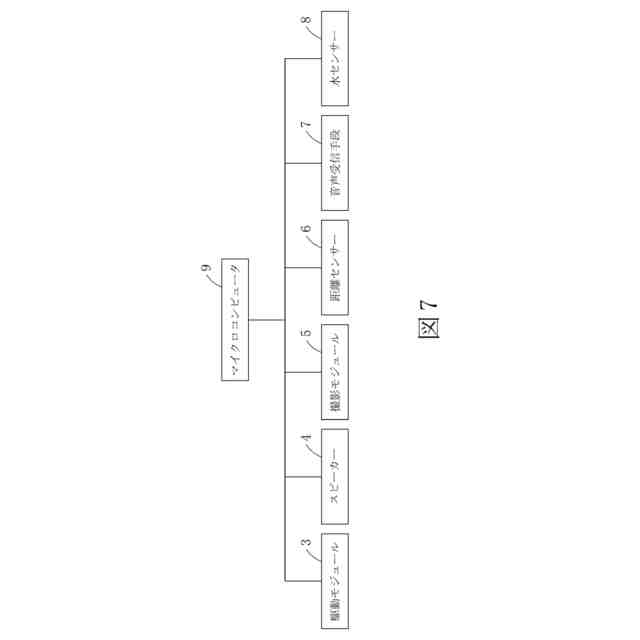
同実施例におけるマイクロコンピュータの他の部品との接続関係が示されるブロック図である。
【発明を実施するための形態】
【0008】
以下では各図面を参照して本発明の実施例について詳しく説明する。
【0009】
図1~図4に本発明の実施例の鳥型ロボット装置100が示されており、図示のように、水面(図示せず)に浮かぶのに適するこの鳥型ロボット装置100は、鳥形の筐体1と、2つの脚構造2と、駆動モジュール3と、複数のスピーカー4と、撮影モジュール5と、複数の距離センサー6と、複数の音声受信手段7と、水センサー8と、マイクロコンピュータ9とを備える。
【0010】
鳥形の筐体1は、例えばプラスチック材料により構成されることができ、鳥の胴体を模した外部形状を有する胴体部11と、鳥の頭を模した外部形状に形成されていると共に、回転可能に胴体部11に取り付けられる頭部12とを有するように構成されている。また、頭部12と胴体部11との位置関係により、左右方向D1と上下方向D2と前後方向D3とを定義する。すなわち、頭部12は上下方向D2において胴体部11の上部、且つ、前後方向D3において胴体部11の前部に取り付けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
フィギュア
20日前
個人
盤上遊戯具
16日前
個人
玩具
10日前
個人
球技用ベース
2か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ