TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025008820
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023111356
出願日
2023-07-06
発明の名称
ロボット、ロボットの制御方法及びプログラム
出願人
カシオ計算機株式会社
代理人
個人
主分類
A63H
11/00 20060101AFI20250109BHJP(スポーツ;ゲーム;娯楽)
要約
【課題】生き物をリアルに模擬することが可能なロボット、ロボットの制御方法及びプログラムを提供する。
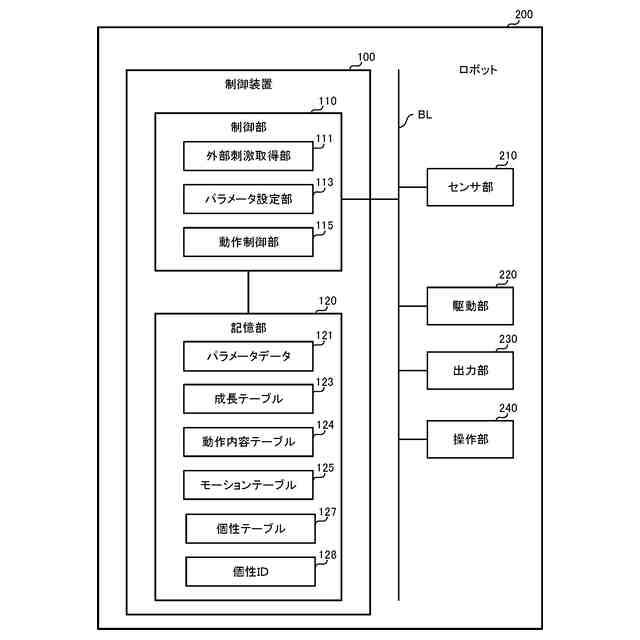
【解決手段】自律的に動作するロボット200において、動作制御部115は、ロボット200の疑似的な成長に依存する第1動作と、ロボット200の疑似的な成長に非依存であって、且つ、ロボット200の個性に依存する第2動作と、をロボット200に実行させる。
【選択図】図8
特許請求の範囲
【請求項1】
自律的に動作するロボットであって、
前記ロボットの疑似的な成長に依存する第1動作と、前記疑似的な成長に非依存であって、且つ、前記ロボットの個性に依存する第2動作と、を前記ロボットに実行させる動作制御手段、
を備えることを特徴とするロボット。
続きを表示(約 1,100 文字)
【請求項2】
前記動作制御手段は、前記疑似的な成長が予め定められた条件を満たしていない間は、前記第1動作を前記ロボットに実行させ、前記疑似的な成長が前記予め定められた条件を満たした後は、前記第1動作と前記第2動作とを前記ロボットに実行させる、
ことを特徴とする請求項1に記載のロボット。
【請求項3】
前記予め定められた条件は、前記疑似的な成長の日数が予め定められた日数に達した場合に満たされる、
ことを特徴とする請求項2に記載のロボット。
【請求項4】
前記予め定められた日数は、前記疑似的な成長が完了する日数よりも少ない、
ことを特徴とする請求項3に記載のロボット。
【請求項5】
前記動作制御手段は、前記第1動作として、前記ロボットの疑似的な性格に依存する性格動作と、前記疑似的な性格に非依存な基本動作と、のうちから選択された動作を前記ロボットに実行させる、
ことを特徴とする請求項1から4のいずれか1項に記載のロボット。
【請求項6】
前記ロボットの疑似的な成長の度合いを表す成長パラメータを設定するパラメータ設定手段、を更に備え、
前記動作制御手段は、前記第1動作として、前記性格動作と前記基本動作とのうちから、前記パラメータ設定手段により設定された前記成長パラメータに応じた確率で選択された動作を前記ロボットに実行させる、
ことを特徴とする請求項5に記載のロボット。
【請求項7】
前記パラメータ設定手段は、前記疑似的な性格を表す性格パラメータを設定し、前記性格パラメータに基づいて前記成長パラメータを設定する、
ことを特徴とする請求項6に記載のロボット。
【請求項8】
前記性格パラメータは、それぞれ異なる性格の度合いを表す複数の性格値を含み、
前記パラメータ設定手段は、前記成長パラメータを、前記複数の性格値のうちの最大値に設定する、
ことを特徴とする請求項7に記載のロボット。
【請求項9】
外部刺激を取得する外部刺激取得手段、を更に備え、
前記パラメータ設定手段は、前記外部刺激取得手段により取得された前記外部刺激に応じて前記性格パラメータを変化させる、
ことを特徴とする請求項7に記載のロボット。
【請求項10】
自律的に動作するロボットの制御方法であって、
前記ロボットの疑似的な成長に依存する第1動作と、前記疑似的な成長に非依存であって、且つ、前記ロボットの個性に依存する第2動作と、を前記ロボットに実行させる、
ことを特徴とするロボットの制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット、ロボットの制御方法及びプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
ペットのような生き物を模擬するロボットが知られている。例えば、特許文献1は、成長パラメータの値に対応したシナリオを動作させることによってユーザに疑似的な成長を感じさせることができるロボット装置を開示している。
【先行技術文献】
【特許文献】
【0003】
特開2003-285286号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されたロボットは、成長パラメータの値に対応したシナリオを動作させることで、生き物が成長する様子をリアルに模擬することができる。しかしながら、実際の生き物は、成長に応じて様々に動作を変化させることに加えて、遺伝等の先天的な要因による個性を有する。このような個性を考慮することで、生き物をよりリアルに模擬することが求められている。
【0005】
本発明は、以上のような課題を解決するためのものであり、生き物をリアルに模擬することが可能なロボット、ロボットの制御方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明に係るロボットの一態様は、
自律的に動作するロボットであって、
前記ロボットの疑似的な成長に依存する第1動作と、前記疑似的な成長に非依存であって、且つ、前記ロボットの個性に依存する第2動作と、を前記ロボットに実行させる動作制御手段、
を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、生き物をリアルに模擬することが可能なロボット、ロボットの制御方法及びプログラムを提供することができる。
【図面の簡単な説明】
【0008】
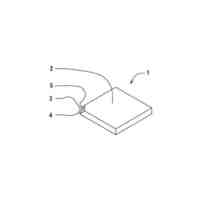
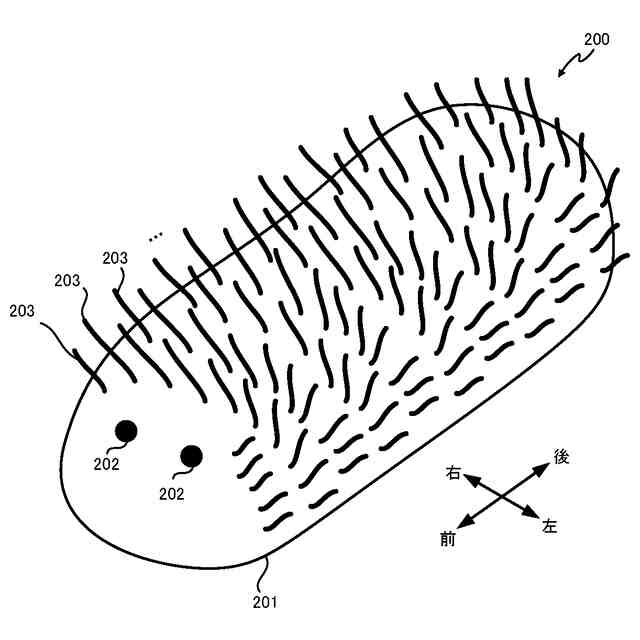
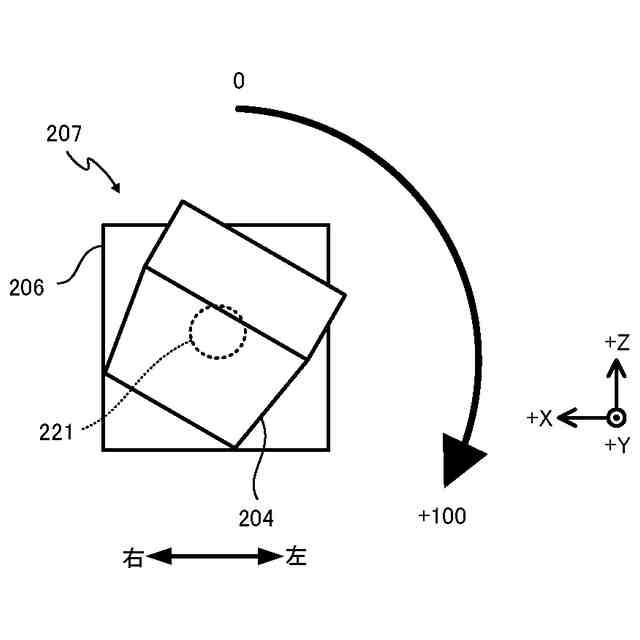
実施形態に係るロボットの外観を示す図である。
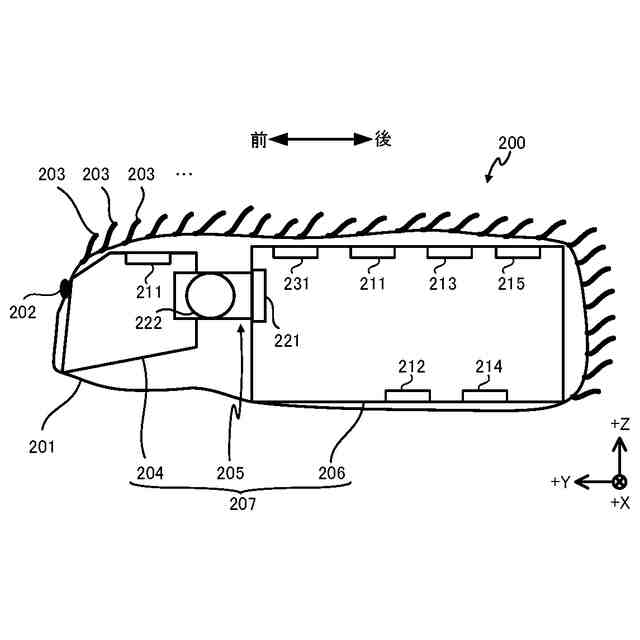
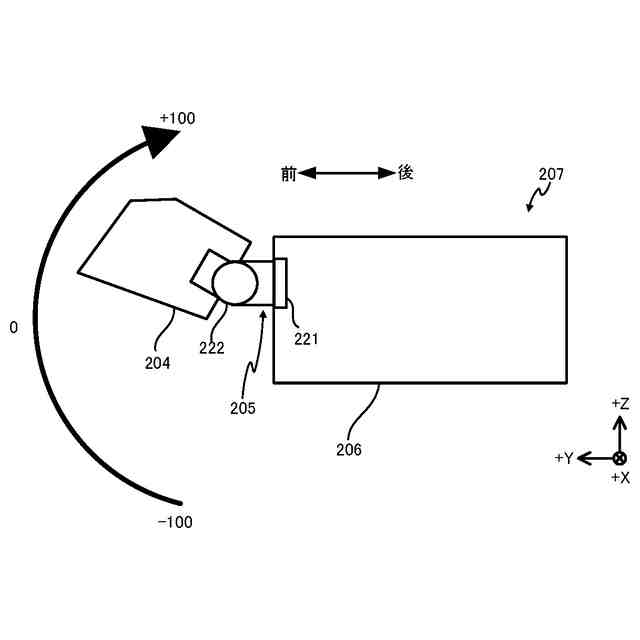
実施形態に係るロボットを側面から見た断面図である。
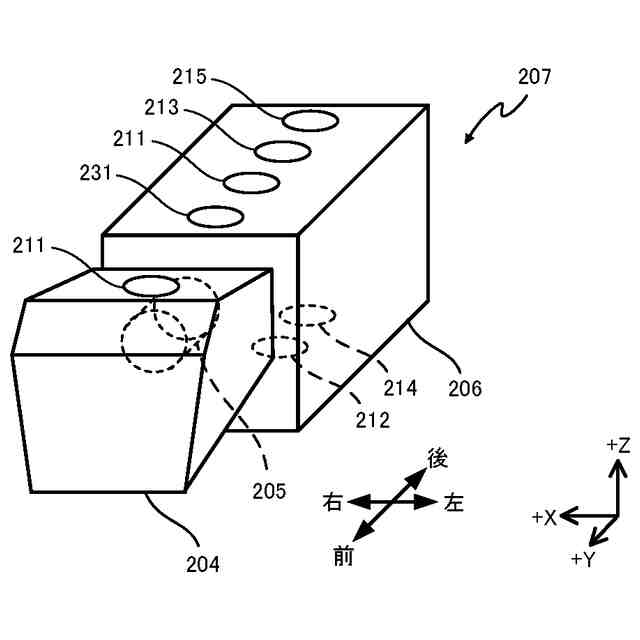
実施形態に係るロボットの筐体を示す図である。
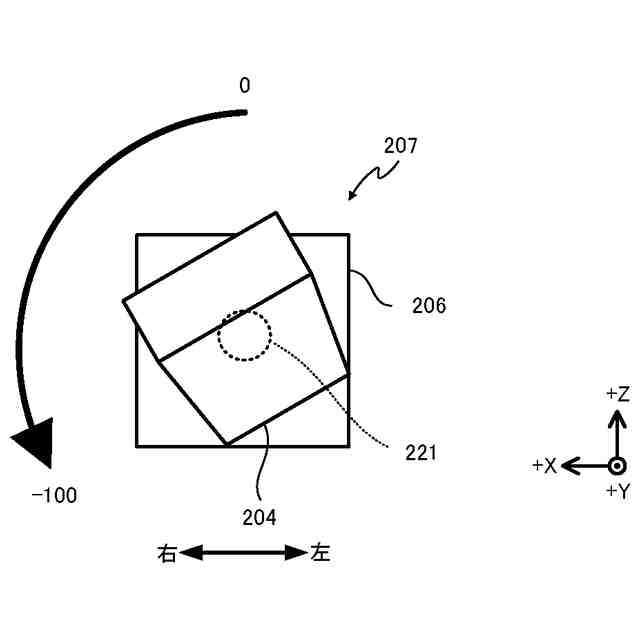
実施形態に係るロボットのひねりモータの動きを示す第1の図である
実施形態に係るロボットのひねりモータの動きを示す第2の図である。
実施形態に係るロボットの上下モータの動きを示す第1の図である。
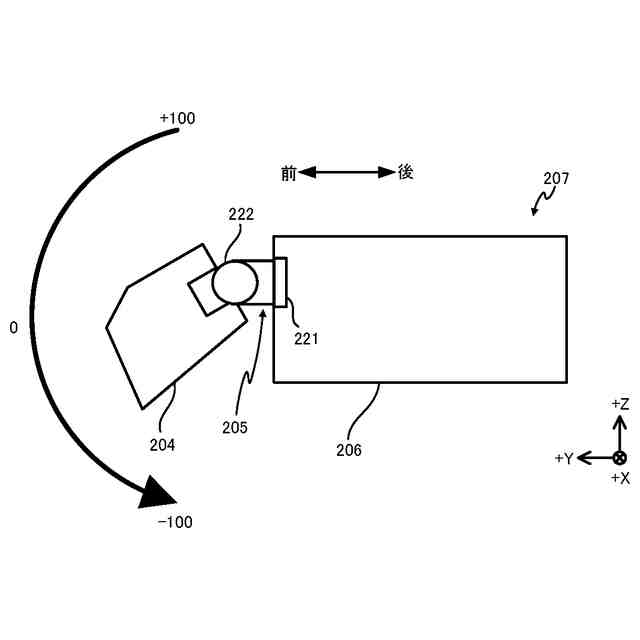
実施形態に係るロボットの上下モータの動きを示す第2の図である。
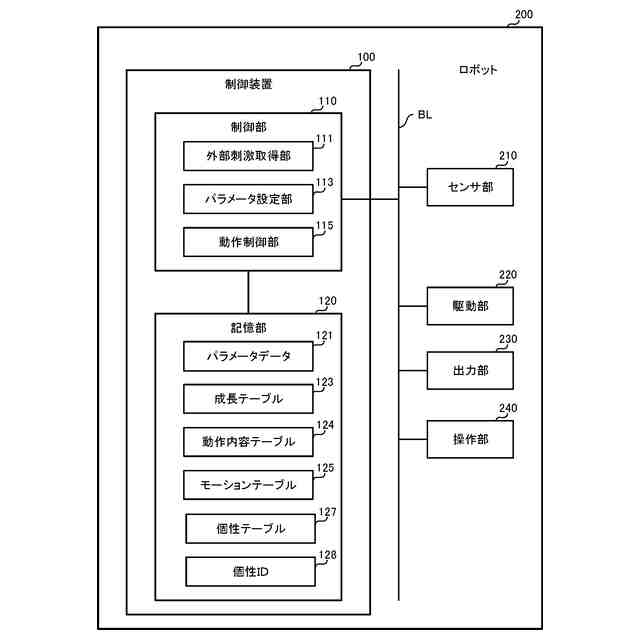
実施形態に係るロボットの構成を示すブロック図である。
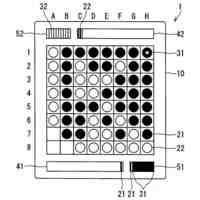
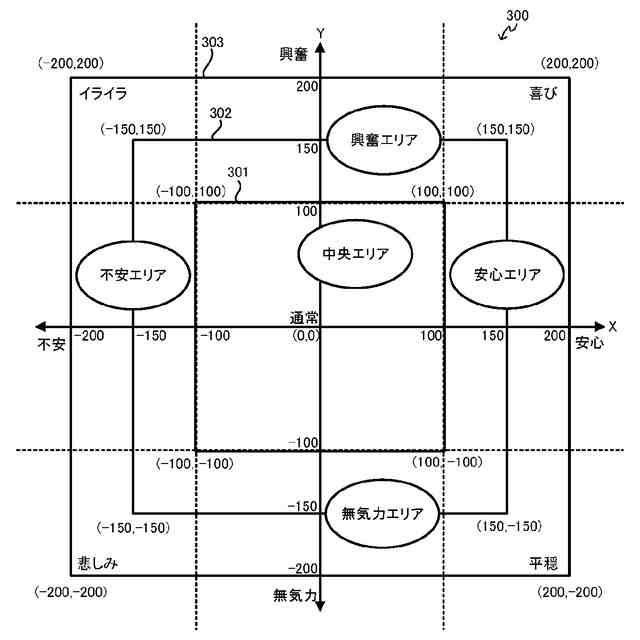
実施形態に係る感情マップの例を示す図である。
実施形態に係る性格値レーダーチャートの例を示す図である。
実施形態に係る成長テーブルの例を示す図である。
実施形態に係る動作内容テーブルの例を示す図である。
実施形態に係るモーションテーブルの例を示す図である。
実施形態に係る個性テーブルの例を示す図である。
実施形態に係るロボットが実行する動作の期間による違いを示す図である。
実施形態に係るロボット制御処理の流れを示すフローチャートである。
実施形態に係る動作制御処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について、図面を参照して説明する。なお、図中同一又は相当する部分には同一符号を付す。
【0010】
図1から図3に、本実施形態に係るロボット200の外観を示す。ロボット200は、ユーザによる直接的な操作によらずに自律的に動作する装置である。図1に示すように、ロボット200は、小型の動物を模したペットロボットである。ロボット200は、目を模した装飾部品202と、ふさふさの毛203と、を備えた外装201を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
フィギュア
4日前
個人
盤上遊戯具
今日
個人
球技用ベース
2か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ