TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024178516
公報種別
公開特許公報(A)
公開日
2024-12-25
出願番号
2023096695
出願日
2023-06-13
発明の名称
情報処理装置、制御方法及びプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20241218BHJP(制御;調整)
要約
【課題】移動体を安定して運行させることである。
【解決手段】情報処理装置は、移動体を移動させる経路の情報を取得する経路情報取得手段と、前記移動体を移動させる経路上の環境情報を取得する環境情報取得手段と、前記移動体の自己位置姿勢を推定し、推定結果を前記環境情報に保存する推定手段と、前記環境情報に基づいて、前記移動体の自己位置姿勢を推定する精度を計算する精度計算手段と、前記精度計算手段が計算した精度に応じて、前記移動体の経路を更新する経路設定手段と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
移動体を移動させる経路の情報を取得する経路情報取得手段と、
前記移動体を移動させる経路上の環境情報を取得する環境情報取得手段と、
前記移動体の自己位置姿勢を推定し、推定結果を前記環境情報に保存する推定手段と、
前記環境情報に基づいて、前記移動体の自己位置姿勢を推定する精度を計算する精度計算手段と、
前記精度計算手段が計算した精度に応じて、前記移動体の経路を更新する経路設定手段と、
を備えることを特徴とする情報処理装置。
続きを表示(約 930 文字)
【請求項2】
前記精度計算手段は、前記環境情報に含まれる画像に基づいて、精度を計算する
ことを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記精度計算手段は、前記環境情報に含まれる形状に基づいて、精度を計算する
ことを特徴とする請求項1に記載の情報処理装置。
【請求項4】
前記経路設定手段は、前記経路情報取得手段で取得した経路に含まれる1つ以上の領域ごとに、前記精度計算手段が計算した精度に応じて更新する
ことを特徴とする請求項1に記載の情報処理装置。
【請求項5】
前記精度計算手段は、前記経路情報取得手段で取得した経路に含まれない1つ以上の領域について、前記移動体の自己位置姿勢を推定する精度を計算し、
前記経路設定手段は、前記精度計算手段が計算した精度に応じて、前記経路情報取得手段で取得した経路に含まれない1つ以上の領域を前記移動体の経路に設定する
ことを特徴とする請求項1に記載の情報処理装置。
【請求項6】
前記経路情報設定手段によって設定された経路情報を表示装置に対して出力する表示手段をさらに備える、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項7】
前記表示手段は、前記移動体の進行方向及び旋回方向を表示する
ことを特徴とする請求項6に記載の情報処理装置。
【請求項8】
移動体を移動させる経路の情報を取得する経路情報取得工程と、
前記移動体を移動させる経路上の環境情報を取得する環境情報取得工程と、
前記移動体の自己位置姿勢を推定し、推定結果を前記環境情報に保存する推定工程と、
前記環境情報に基づいて、前記移動体の自己位置姿勢を推定する精度を計算する精度計算工程と、
前記精度計算工程で計算した精度に応じて、前記移動体の経路を更新する経路設定工程と、
を備えることを特徴とする制御方法。
【請求項9】
請求項1から請求項7のいずれか一項に記載の各手段としてコンピュータを機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、制御方法及びプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
搬送車両などの移動体を、工場や物流倉庫といった環境内において自動で移動させるために、位置姿勢推定技術が提案されている。搬送車両としては、例えばAGV(Automated Guided Vehicle)が挙げられる。AGVは、Automated Guided Vehicleの略称である。
【0003】
移動体を自律走行させる場合、移動体が走行する経路が、位置姿勢の推定精度が高い経路となるように、位置姿勢推定の信頼度を用いる方法が知られている。例えば、特許文献1では、空間内の各位置に、その位置における位置姿勢推定の信頼度を対応付けた信頼度地図データを作成する。経路生成の際は、その信頼度地図データを参照し、信頼度が閾値以上である高信頼度領域を決定し、高信頼度領域を通過する経路を生成する。
【先行技術文献】
【特許文献】
【0004】
特開2020-166702号公報
【非特許文献】
【0005】
J.Engel,T.Schps, and D.Cremers.LSD-SLAM:Large-Scale Direct Monocular SLAM. In European Conference on Computer Vision(ECCV),2014
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1の方法では信頼度地図データがない場合は、移動体を安定して運行できないという問題があった。
【0007】
本発明は上記問題に鑑みてなされたものであり、移動体を安定して運行させることを目的とする。
【課題を解決するための手段】
【0008】
本発明の一実施形態の情報処理装置は、移動体を移動させる経路の情報を取得する経路情報取得手段と、前記移動体を移動させる経路上の環境情報を取得する環境情報取得手段と、前記移動体の自己位置姿勢を推定し、推定結果を前記環境情報に保存する推定手段と、前記環境情報に基づいて、前記移動体の自己位置姿勢を推定する精度を計算する精度計算手段と、前記精度計算手段が計算した精度に応じて、前記移動体の経路を更新する経路設定手段と、を備える。
【発明の効果】
【0009】
本発明によれば、移動体を安定して運行させることができる。
【図面の簡単な説明】
【0010】
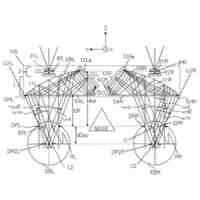
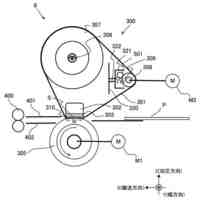
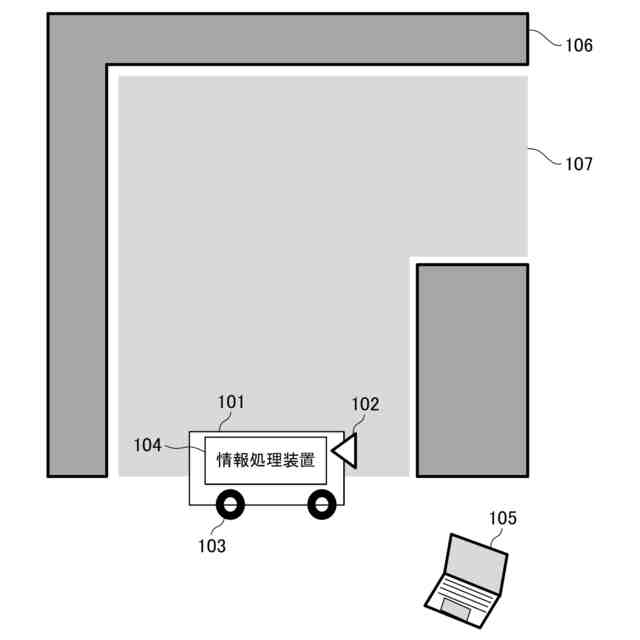
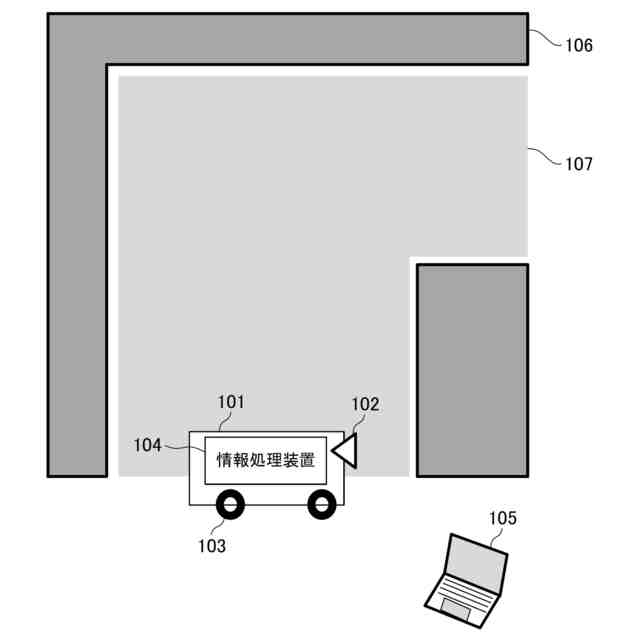
本発明の実施例1に係る移動体を含む倉庫での利用例を示す模式図である。
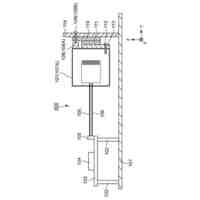
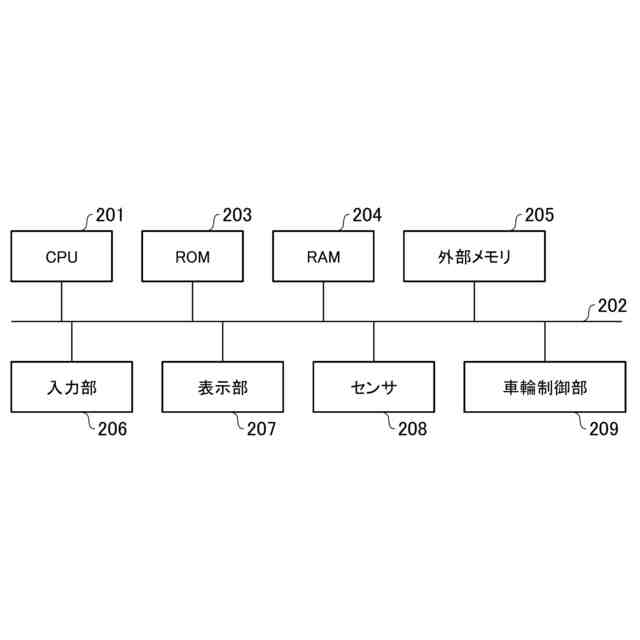
本発明の実施例1に係る情報処理装置のハードウェア構成図である。
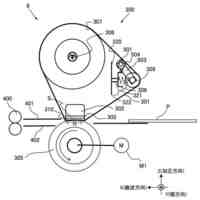
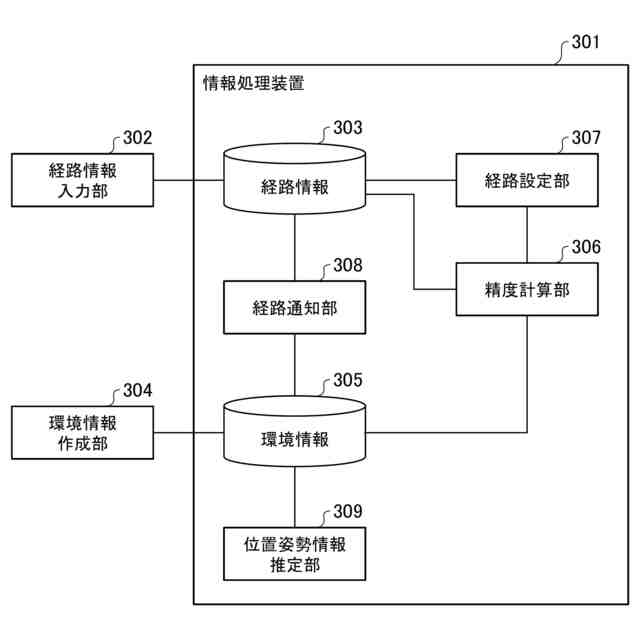
本発明の実施例1に係る情報処理装置のデータフロー図である。
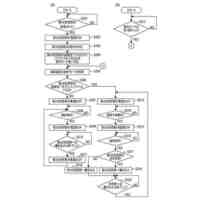
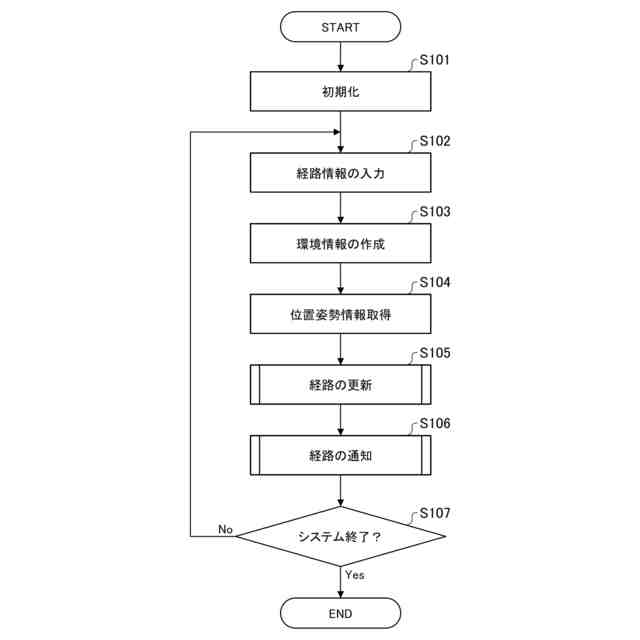
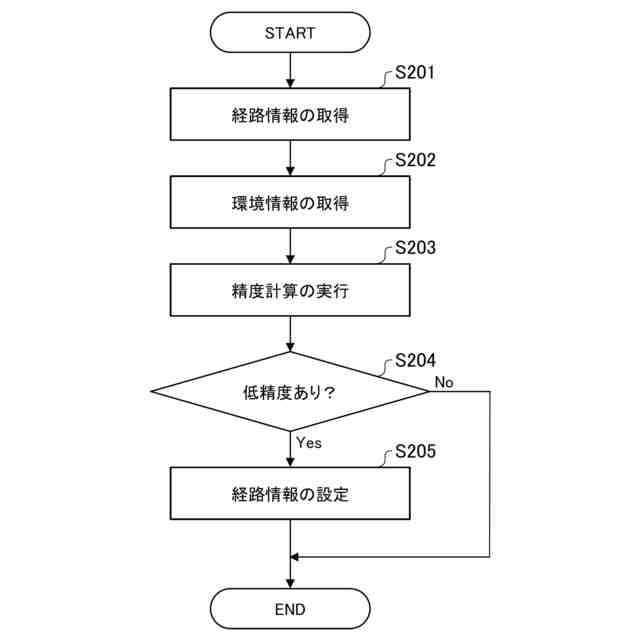
本発明の実施例1に係る情報処理装置が実行する処理を示すフローチャートである。
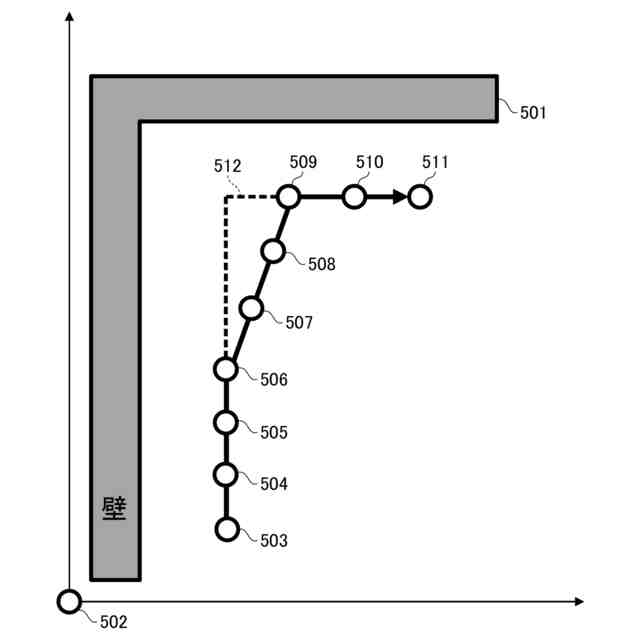
本発明の実施例1に係る経路のイメージ図である。
本発明の実施例1に係る更新処理手順を示すフローチャートである。
本発明の実施例1に係る更新された経路のイメージ図である。
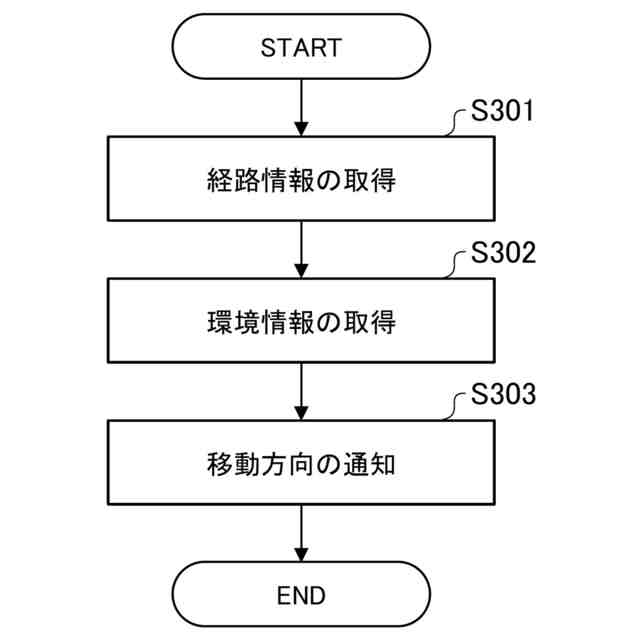
本発明の実施例1に係る通知処理手順を示すフローチャートである。
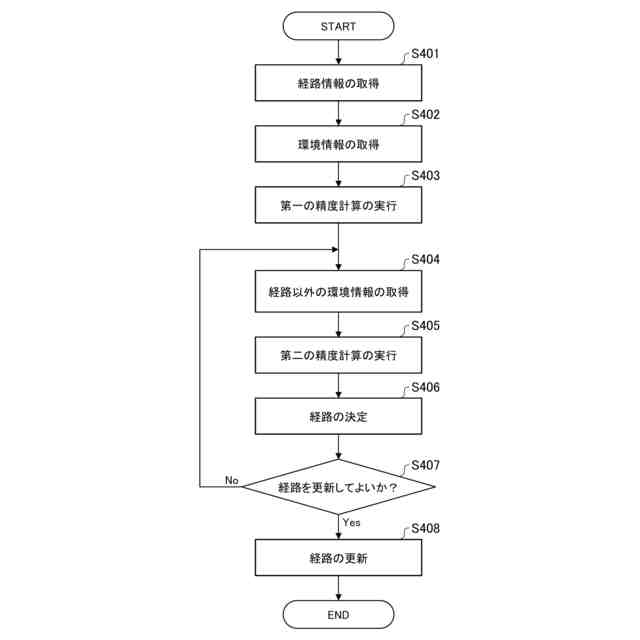
本発明の実施例2に係る更新処理手順を示すフローチャートである。
本発明の実施例2に係る更新された経路のイメージ図である。
本発明の実施例3に係る通知処理手順を示すフローチャートである。
本発明の実施例3に係るユーザ通知される画面のイメージ図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
記録装置
5日前
キヤノン株式会社
電子機器
27日前
キヤノン株式会社
電子機器
4日前
キヤノン株式会社
表示装置
11日前
キヤノン株式会社
記録装置
5日前
キヤノン株式会社
電子機器
1か月前
キヤノン株式会社
定着装置
25日前
キヤノン株式会社
撮像装置
27日前
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
表示装置
11日前
キヤノン株式会社
表示装置
11日前
キヤノン株式会社
電子機器
1か月前
キヤノン株式会社
表示装置
4日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
撮像装置
4日前
キヤノン株式会社
撮像装置
4日前
キヤノン株式会社
発光装置
11日前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
定着装置
25日前
キヤノン株式会社
二次電池
6日前
キヤノン株式会社
測距装置
1か月前
キヤノン株式会社
記録装置
25日前
キヤノン株式会社
撮像装置
4日前
キヤノン株式会社
撮像装置
4日前
キヤノン株式会社
撮像装置
4日前
キヤノン株式会社
定着装置
25日前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
撮像装置
19日前
キヤノン株式会社
定着装置
19日前
キヤノン株式会社
雲台装置
1か月前
キヤノン株式会社
撮像装置
13日前
キヤノン株式会社
電子機器
今日
キヤノン株式会社
撮像装置
19日前
キヤノン株式会社
撮像装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ