TOP
|
特許
|
意匠
|
商標
意匠ウォッチ
Twitter
他の意匠を見る
発行日
2025-05-26
公報種別
意匠公報(S)
登録番号
1799382
登録日
2025-05-15
意匠に係る物品
ロボット
意匠分類
J0
-2W13(J1~J7に属さないその他の一般機械器具)
出願番号
2025001008
出願日
2025-01-20
意匠権者
株式会社リビングロボット
代理人
個人
意匠に係る物品の説明
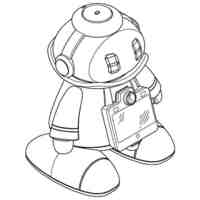
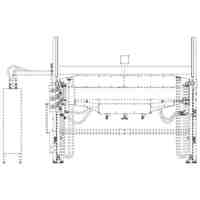
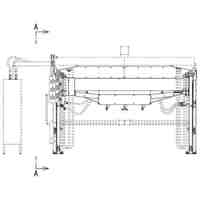
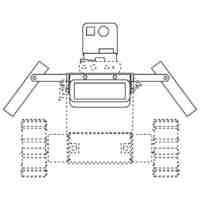
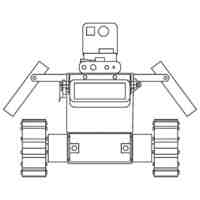
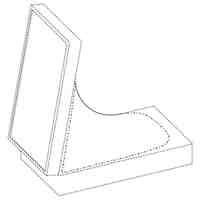
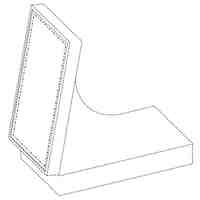
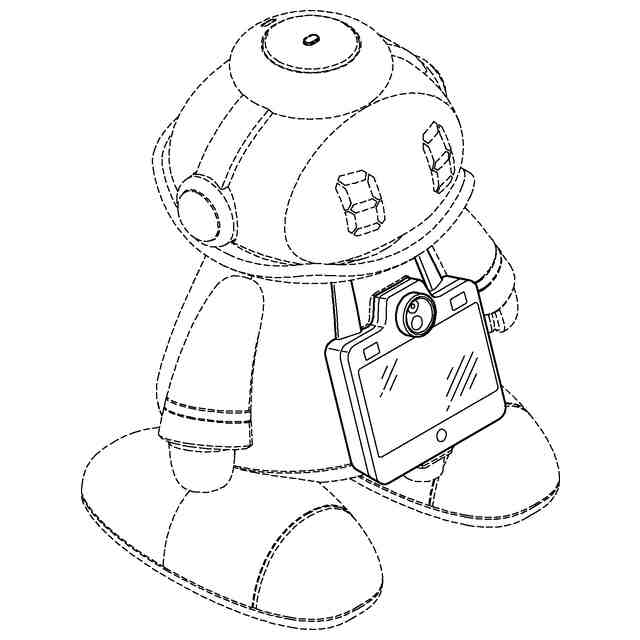
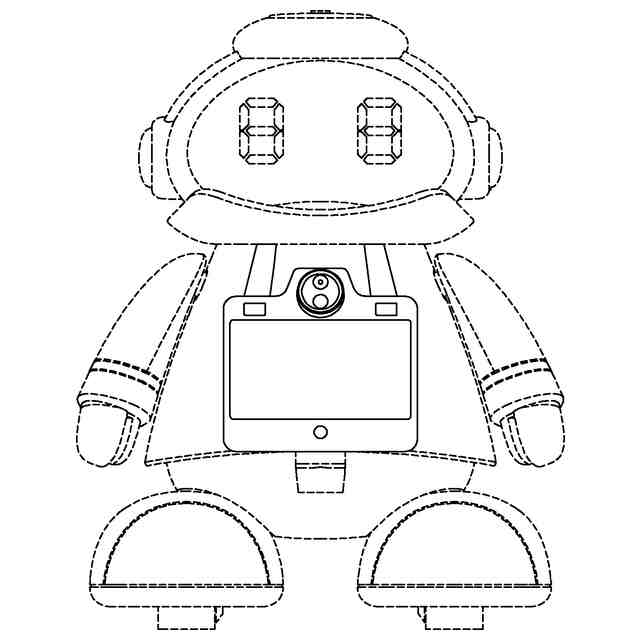
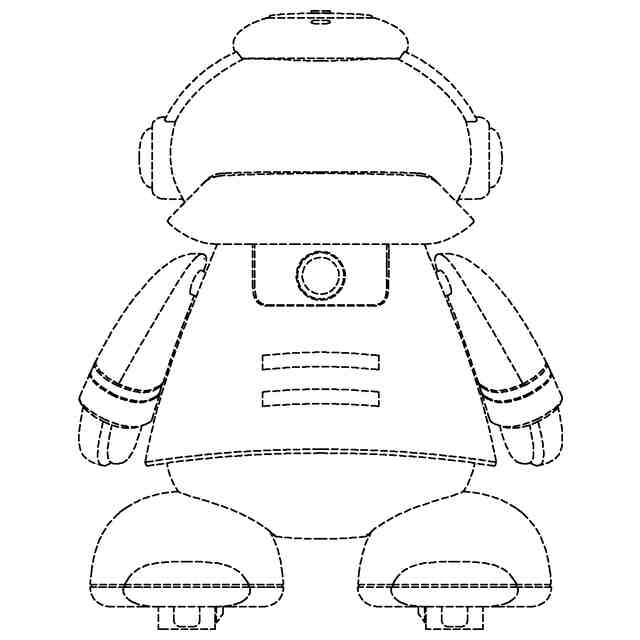
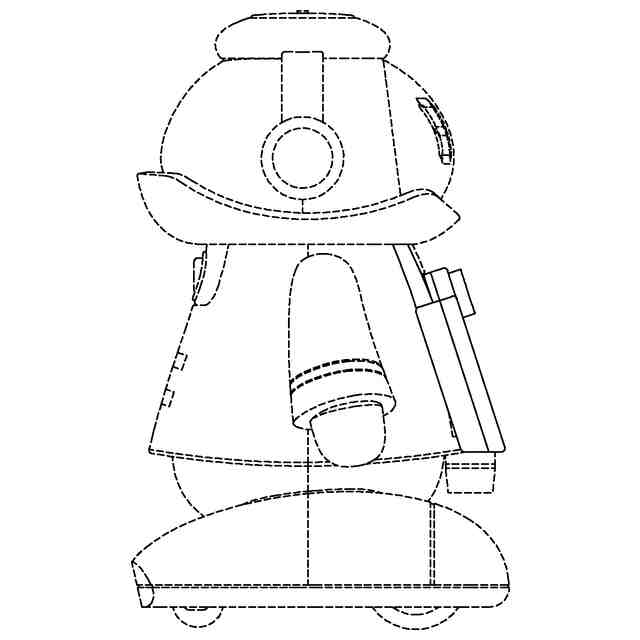
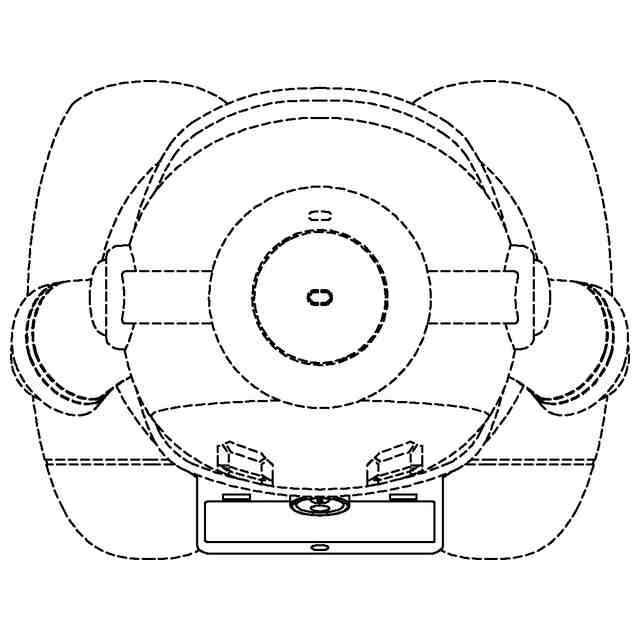
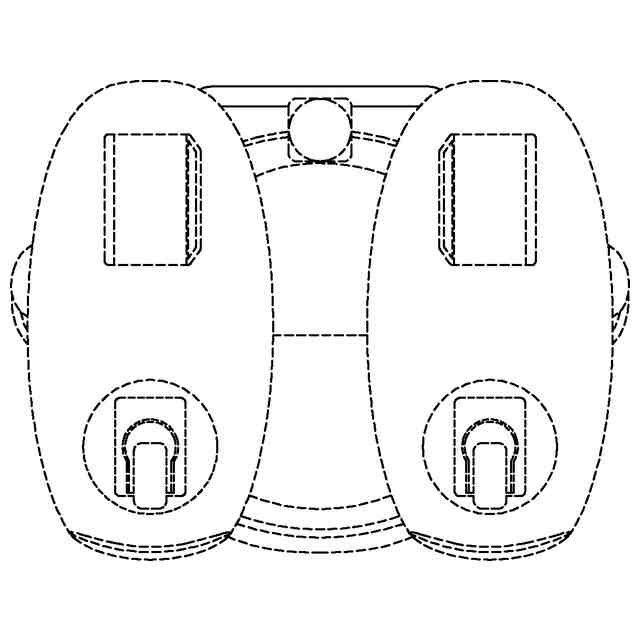
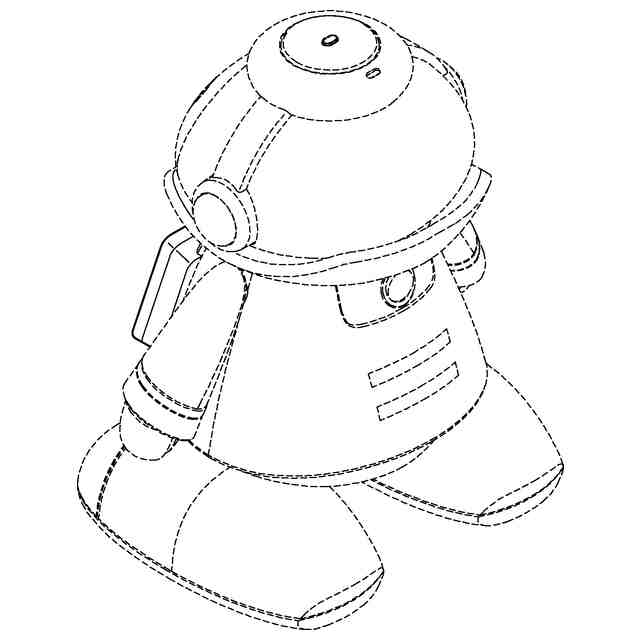
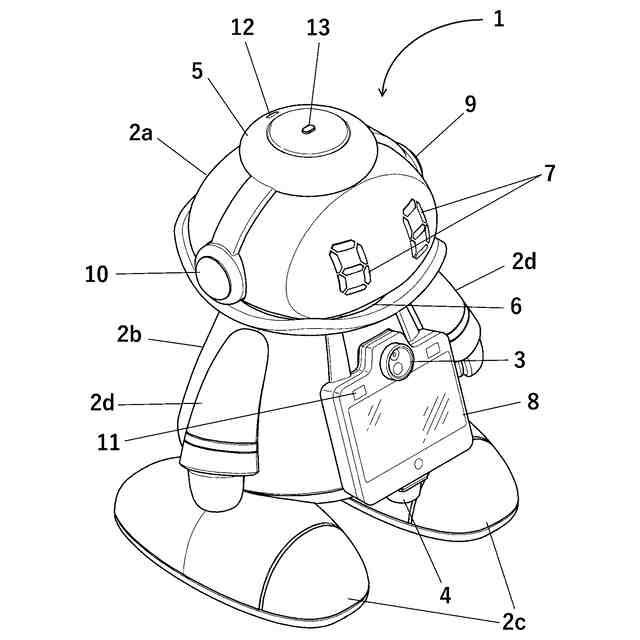
本物品は、利用者とコミュニケーションを図り、利用者の見守りを行うロボットである。 [使用状態を示す参考斜視図]に示すように、ロボット1は、頭部2a、胴部2b、脚部2c、腕部2d、撮像部3、測距部4、音検出部5、第1報知部6、第2報知部7、第3報知部8、SELECT/ENTERスイッチ9、CANCELスイッチ10、赤外線出力部11、USBソケット12、タッチセンサ13を備える。 ロボット1は、胴部2bに内蔵された蓄電池(図示せず)から供給される電力に基づき動作する。 ロボット1には、CPU(Central Processing Unit)、メモリ等を備える制御部(図示せず)が内蔵され、制御部によってロボット1の動作が制御される。更にロボット1には、通信部(図示せず)が設けられている。制御部は、通信部を介してネットワークを経由してサーバ等にアクセスし、利用者の生活に関する情報等を取得し、更に所定のサービスを受けることができる。所定のサービスには生成AIを用いたサービスが含まれる。これによって、利用者はロボット1と言語によるコミュニケーションを図ることができる。 脚部2cには駆動用のホイール([底面図]等を参照)が設けられている。ホイールはモータ等の駆動源(図示せず)に接続されている。制御部は、床面に対するホイールの向き及び回転方向を制御することで、ロボット1を前後の任意の方向に移動させる。 撮像部3は、CCD(Charge Coupled Device)あるいはCMOS(Complementary Metal Oxide Semiconductor)で構成された撮像素子を含む。 測距部4は、LiDARにより測距を行う。LiDARは、レーザー光を出射して、その反射光の情報に基づき対象物までの距離、対象物の形状等を計測する。 制御部は、撮像部3で撮影された画像あるいは(及び)測距部4で計測された測距情報に基づき家屋のマッピングを行い、生成されたマップを利用してロボット1を移動させる。即ち、ロボット1は家屋内を自律的に移動可能とされている。 音検出部5には複数(例えば6つ)の図示しないマイクロフォンが内蔵され、全方位からの音を検出する。なお、ロボット1には、図示しない環境計測部が内蔵されており、環境計測部は、ガスセンサ(CO2センサ、VOC(揮発性有機化合物)センサ)、温度センサ、湿度センサを含んでいる。 第1報知部6はスピーカで構成され、利用者に対して音声情報を提供する。制御部は、音検出部5で検出された利用者の発話を認識し、第1報知部6を介して利用者に応答する。 第2報知部7は、ロボット1の顔面に相当する部位の曲面に沿って目の位置に設けられた7セグメントLEDで構成されている。制御部は、選択したセグメントを点灯(ON)/消灯(OFF)する。 第3報知部8は、LCD(liquid crystal display)、OLED(Organic Light Emitting Diode)等で構成されたディスプレイであり、利用者に種々の情報を提供する。 SELECT/ENTERスイッチ9、CANCELスイッチ10は、利用者がロボット1の動作モードや機能等を選択する際に利用される。ここで第3報知部8には、ロボット1の機能を選択するメニューが表示される。利用者は、耳当ての形態とされたSELECT/ENTERスイッチ9を周方向に回転させて、メニューの選択項目を切り替える。そして、SELECT/ENTERスイッチ9を押下する(頭部2aの側に押し込む)ことで、メニューの選択内容が確定する(メニューが階層構造とされている場合は、下位の選択項目に移る)。また、利用者がCANCELスイッチ10を押下することで、選択内容が解除される(メニューが階層構造とされている場合は、上位の選択項目に移る)。 赤外線出力部11は赤外線(IR)制御信号の送信部として機能する。例えば、音検出部5で検出された利用者の発話を認識した結果、あるいはSELECT/ENTERスイッチ9で確定された指示に基づき、制御部は、赤外線出力部11を介してエアコン等の制御対象に対して制御信号を送信する。 上述した、撮像部3、第3報知部8、赤外線出力部11は一体とされ、ロボット1の首からストラップで吊るされた態様で、胴部2bに設けられる。 USBソケット12(USBタイプC-メス)は、ロボット1の頭部2aに凹部を成すように設けられている。USBソケット12を介してロボット1とPC(Personal Computer)等の端末とが接続され、データの送受信が行われる。また、USBソケット12を介して、スマートフォン等の機器に対して充電用の電力が供給される。 タッチセンサ13は、ロボット1の頭頂に凸部を成すように設けられ、利用者がタッチセンサ13に接触することで、ロボット1の起動(アクティブ)と停止(スリープ)とが切り替わる。
意匠の説明
本意匠登録出願に係るロボットの大きさは、高さが40cm~60cmである。右側面図は左側面図と対称にあらわれるため省略する。正面・平面・左側面側からの斜視図の正面側に表された細線は、いずれも立体表面の形状を特定するためのものである。実線で表された部分が、部分意匠として意匠登録を受けようとする部分である。
この意匠をJ-PlatPat(特許庁公式サイト)で参照する
関連意匠
株式会社リビングロボット
ロボット
6か月前
株式会社リビングロボット
ロボット
6か月前
株式会社ダイフク
洗車機
12か月前
株式会社ダイフク
洗車機
12か月前
杭州宇樹科技有限公司
ロボット
7か月前
GROOVE X株式会社
ロボット
11か月前
株式会社N.ジェン
ロボット
5日前
株式会社リビングロボット
ロボット
6か月前
株式会社リビングロボット
ロボット
6か月前
杭州宇樹科技有限公司
ロボット
6か月前
北京萌友智能科技有限公司
ロボット
7か月前
株式会社大林組
ロボット
10か月前
株式会社大林組
ロボット
10か月前
深セン市優必選科技股ふん有限公司
ロボット
7か月前
GROOVE X株式会社
ロボット
1か月前
ソニーグループ株式会社
ロボット
28日前
GROOVE X株式会社
ロボット
1か月前
ソニーグループ株式会社
ロボット
6か月前
GROOVE X株式会社
ロボット
1か月前
杭州宇樹科技有限公司
ロボット
12か月前
株式会社スギノマシン
洗浄用ガン
7か月前
花王株式会社
粒体吐出機
11か月前
株式会社丸山製作所
高圧洗浄機
6か月前
株式会社丸山製作所
高圧洗浄機
7か月前
株式会社エアリアルワークス
点検ロボット
7か月前
現代自動車株式会社
配送ロボット
11か月前
株式会社不二越
洗浄室用隔壁
5か月前
深せん市普渡科技有限公司
搬送ロボット
1か月前
株式会社テクノメデイカ
搬送ロボット
7か月前
ディスタルモーション エスエー
手術用ロボット
7か月前
ディスタルモーション エスエー
手術用ロボット
7か月前
ディスタルモーション エスエー
手術用ロボット
7か月前
ディスタルモーション エスエー
手術用ロボット
7か月前
深せん市易検車服科技有限公司
冷媒配管洗浄機
9か月前
ディスタルモーション エスエー
手術用ロボット
7か月前
ディスタルモーション エスエー
手術用ロボット
7か月前
続きを見る
他の意匠を見る
 意匠ウォッチ
意匠ウォッチ