TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025137503
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2025085699,2024035262
出願日
2025-05-22,2024-03-07
発明の名称
人力駆動車用の制御装置
出願人
株式会社シマノ
代理人
個人
,
個人
主分類
B62M
6/45 20100101AFI20250911BHJP(鉄道以外の路面車両)
要約
【課題】モータを好適に制御できる人力駆動車用の制御装置を提供する。
【解決手段】人力駆動車用の制御装置は、前記人力駆動車に推進力を付与するモータを制御するように構成される制御部を備え、前記制御部は、ペダリングに関するペダリング状態が所定ペダリング状態となる所定時点から第1期間が経過するまでに、前記モータを停止させるように前記モータを制御するように構成され、前記所定時点よりも後において前記モータの出力を維持、または、前記モータの出力を上昇させるように前記モータを制御するように構成され、前記所定時点から前記第1期間が経過するまでに、前記モータを停止させるように前記モータを制御するように構成される。
【選択図】図2
特許請求の範囲
【請求項1】
人力駆動車用の制御装置であって、
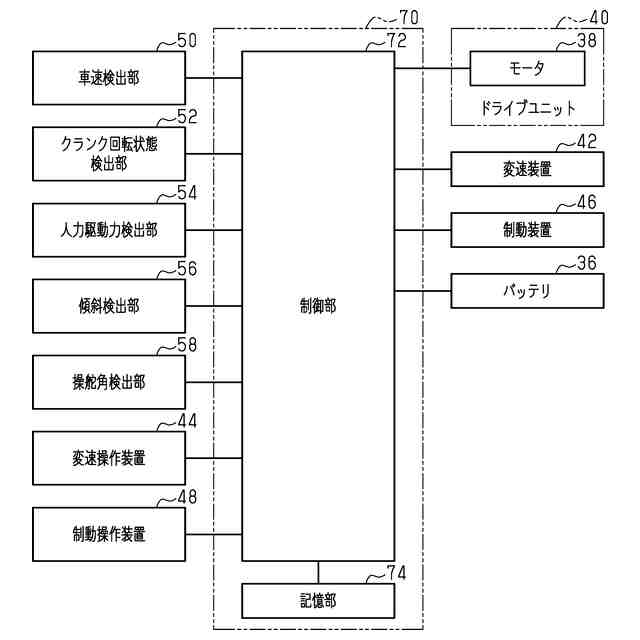
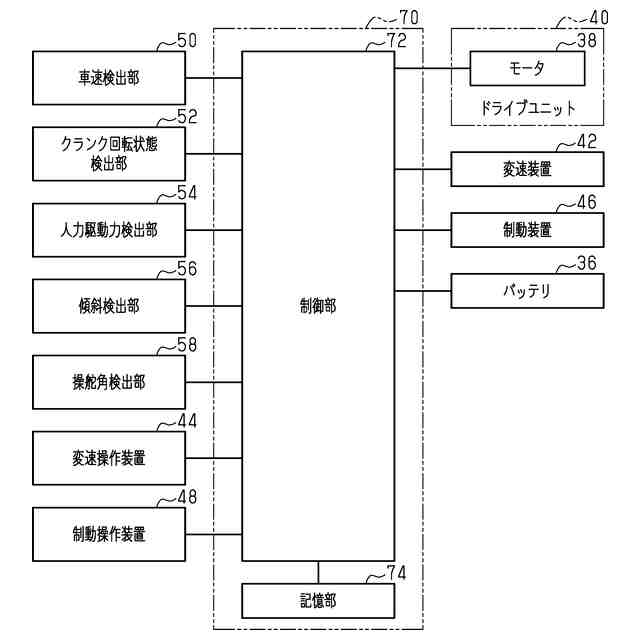
前記人力駆動車に推進力を付与するモータを制御するように構成される制御部を備え、
前記制御部は、
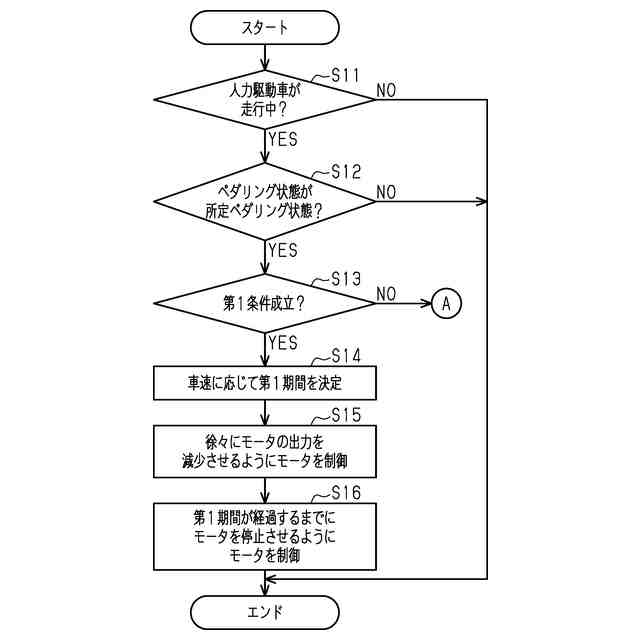
ペダリングに関するペダリング状態が所定ペダリング状態となる所定時点から第1期間が経過するまでに、前記モータを停止させるように前記モータを制御するように構成され、
前記所定時点以降において前記モータの出力を維持、または、前記モータの出力を上昇させるように前記モータを制御するように構成され、
前記所定時点から前記第1期間が経過するまでに、前記モータを停止させるように前記モータを制御するように構成される、制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記制御部は、前記所定時点から前記第1期間よりも短い第2期間が経過するまで、前記モータの出力を維持、または、前記モータの出力を上昇させるように前記モータを制御
するように構成され、
前記所定時点から前記第2期間が経過すると、前記モータの出力を減少させるように前記モータを制御するように構成される、請求項1に記載の制御装置。
【請求項3】
前記制御部は、前記所定時点から前記第1期間が経過すると、前記モータを停止させるように前記モータを制御するように構成される、請求項1に記載の制御装置。
【請求項4】
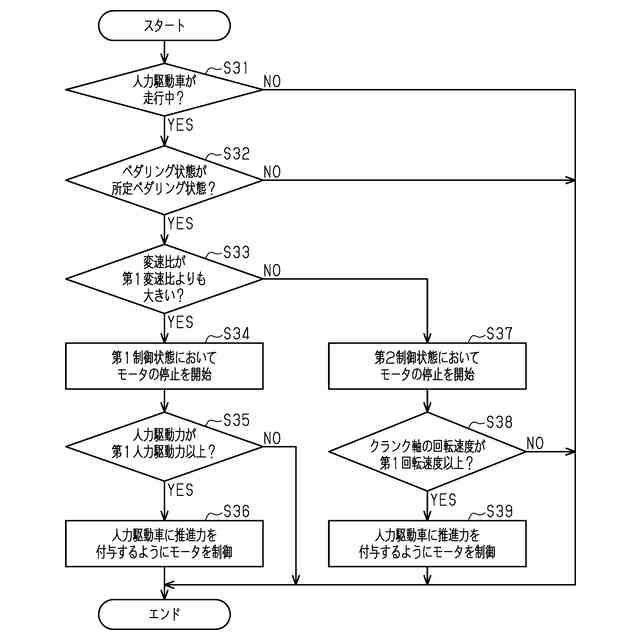
前記所定ペダリング状態は、クランク軸の回転速度が所定回転速度以下の状態である、請求項1に記載の制御装置。
【請求項5】
前記所定ペダリング状態は、人力駆動力が停止判定駆動力以下の状態である、請求項1に記載の制御装置。
【請求項6】
前記制御部は、
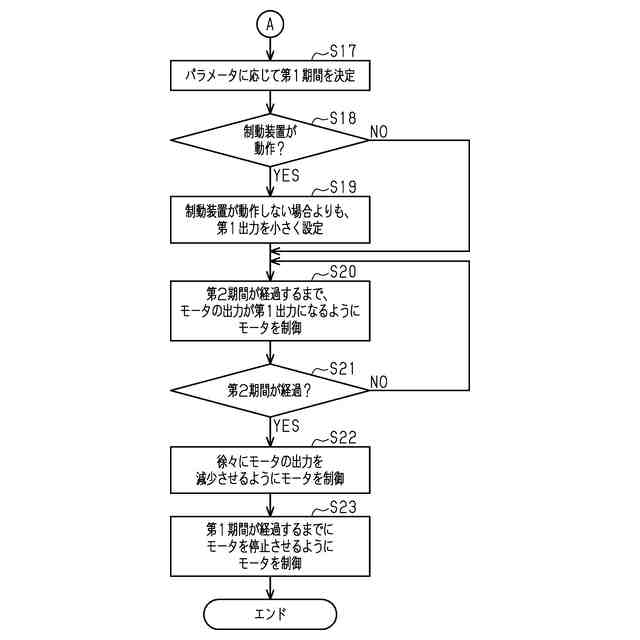
前記所定時点から前記第1期間よりも短い第2期間が経過するまで、前記モータの出力が第1出力になるように前記モータを制御し、
前記所定時点から前記第2期間が経過すると、前記モータの出力を減少させるように前記モータを制御し、
前記所定時点から前記第1期間が経過するまでに、前記モータを停止させるように前記モータを制御するように構成される、請求項1に記載の制御装置。
【請求項7】
前記制御部は、前記所定時点から前記第2期間が経過すると、徐々に前記モータの出力を減少させるように前記モータを制御するように構成され、
前記所定時点から前記第1期間が経過するまでに、前記モータを停止させるように前記モータを制御するように構成される、請求項6に記載の制御装置。
【請求項8】
前記制御部は、前記第2期間を変更可能に構成される、請求項2または6に記載の制御装置。
【請求項9】
前記制御部は、前記第2期間を前記第1期間の長さに応じて決定する、請求項8に記載の制御装置。
【請求項10】
前記制御部は、前記モータの出力が大きい場合の前記第2期間よりも、前記モータの出力が小さい場合の前記第2期間が長くなるように、前記第2期間を決定する、請求項8に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、人力駆動車用の制御装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、例えば、人力駆動車の推進をアシストするモータを含む人力駆動車用のコンポーネントが開示される。
【先行技術文献】
【特許文献】
【0003】
特開2015-209159号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示の目的の1つは、モータを好適に制御できる人力駆動車用の制御装置を提供することである。
【課題を解決するための手段】
【0005】
本開示の第1側面に従う制御装置は、人力駆動車用の制御装置であって、前記人力駆動車に推進力を付与するモータを制御するように構成される制御部を備え、前記制御部は、ペダリングに関するペダリング状態が所定ペダリング状態となる所定時点から第1期間が経過するまでに、前記モータを停止させるように前記モータを制御するように構成され、車速とは異なる前記人力駆動車に関するパラメータに基づいて前記第1期間を決定するように構成される。
第1側面の制御装置によれば、制御部は、所定時点から、車速とは異なるパラメータに基づいて決定される第1期間が経過するまでにモータを停止させることができる。したがって、制御部は、モータを好適に制御できる。
【0006】
本開示の第1側面に従う第2側面の制御装置において、前記制御部は、前記所定時点から前記第1期間が経過すると、前記モータを停止させるように前記モータを制御するように構成される。
第2側面の制御装置によれば、制御部は、第1期間が経過するとモータを停止させるため、モータを好適に停止できる。
【0007】
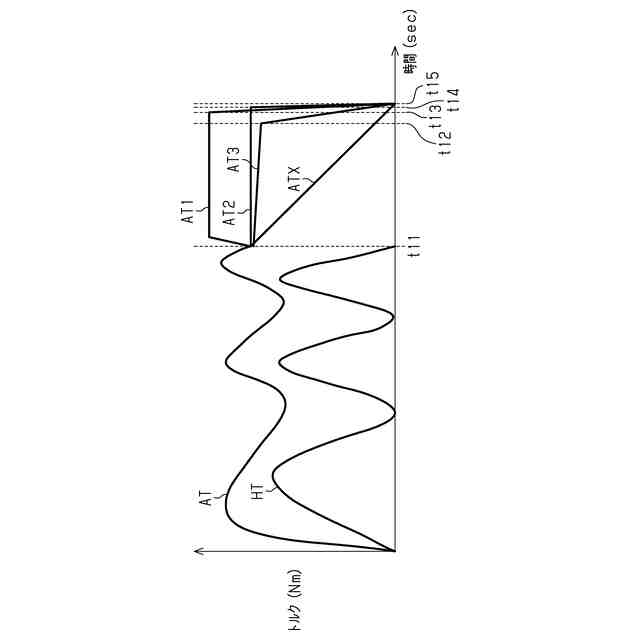
本開示の第1または第2側面に従う第3側面の制御装置において、前記制御部は、前記所定時点から前記第1期間よりも短い第2期間が経過するまで、前記モータの出力が第1出力になるように前記モータを制御し、前記所定時点から前記第2期間が経過すると、前記モータの出力を減少させるように前記モータを制御し、前記所定時点から前記第1期間が経過するまでに、前記モータを停止させるように前記モータを制御するように構成される。
第3側面の制御装置によれば、制御部は、第2期間が経過するまでモータの出力を第1出力にし、かつ、第1期間までにモータを停止させることができる。
【0008】
本開示の第1または第2側面に従う第4側面の制御装置において、前記制御部は、前記モータの制御状態を第1制御状態および第2制御状態のいずれかに設定するように構成され、前記第1制御状態において、前記所定時点から、徐々に前記モータの出力を減少させ、かつ、前記所定時点から前記第1期間が経過するまでに、前記モータを停止させるように前記モータを制御するように構成され、前記第2制御状態において、前記所定時点から前記第1期間よりも短い第2期間が経過するまで、前記モータの出力が第1出力になるように前記モータを制御し、前記所定時点から前記第2期間が経過すると、前記モータの出力を減少させるように前記モータを制御し、かつ、前記所定時点から前記第1期間が経過するまでに、前記モータを停止させるように前記モータを制御するように構成される。
第4側面の制御装置によれば、制御部は、第1制御状態において、所定時点から第1期間が経過するまでにモータを停止させることができる。第4側面の制御装置によれば、制御部は、第2制御状態において、第2期間が経過するまではモータの出力を第1出力にし、かつ、第1期間までにモータを停止させることができる。
【0009】
本開示の第4側面に従う第5側面の制御装置において、前記制御部は、前記第2制御状態において、前記所定時点から前記第2期間が経過すると、徐々に前記モータの出力を減少させるように前記モータを制御し、前記所定時点から前記第1期間が経過するまでに、前記モータを停止させるように前記モータを制御するように構成される。
第5側面の制御装置によれば、第2制御状態において、第2期間が経過するまではモータの出力を第1出力にし、第2期間が経過してから徐々にモータの出力を減少させるため、モータを好適に停止させることができる。
【0010】
本開示の第3から第5側面のいずれか1つに従う第6側面の制御装置において、前記第1出力は、前記モータの出力の上限値と等しい。
第6側面の制御装置によれば、制御部は、所定時点から第2期間が経過するまでモータの出力をモータの出力の上限値にできる。したがって、ライダは、第2期間が経過するまで、モータによるアシスト力の不足を覚えにくい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社シマノ
人力駆動車用の制御装置
4日前
他の特許を見る
 特許ウォッチ
特許ウォッチ