TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025115387
公報種別
公開特許公報(A)
公開日
2025-08-06
出願番号
2025008997
出願日
2025-01-22
発明の名称
弾性付与プロセスの制御方法、制御ネットワークの訓練方法及び関連装置
出願人
チョーチアン ヘンイー ペトロケミカル カンパニー,リミテッド
,
ハイニン ヘンイー ニュー マテリアルズ カンパニー リミテッド
代理人
弁理士法人太陽国際特許事務所
主分類
D02G
1/04 20060101AFI20250730BHJP(糸;糸またはロープの機械的な仕上げ;整経またはビーム巻き取り)
要約
【課題】弾性付与プロセスの制御方法、制御ネットワークの訓練方法及び関連装置を提供する。
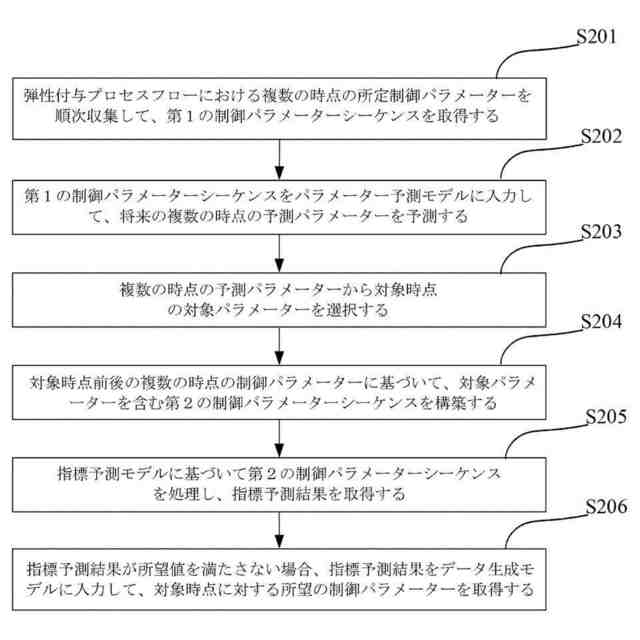
【解決手段】具体的な実現方案では、弾性付与プロセスにおける複数の時点の所定制御パラメーターを順次収集して、第1の制御パラメーターシーケンスを取得し、第1の制御パラメーターシーケンスをパラメーター予測モデルに入力して、将来の複数の時点の予測パラメーターを予測し、複数の時点の予測パラメーターから対象時点の対象パラメーターを選択し、対象時点前後の複数の時点の制御パラメーターに基づいて対象パラメーターを含む第2の制御パラメーターシーケンスを構築し、指標予測モデルに基づいて第2の制御パラメーターシーケンスを処理して、指標予測結果を取得し、指標予測結果が所望値を満たさない場合、指標予測結果をデータ生成モデルに入力して、対象時点に対する所望の制御パラメーターを取得する。
【選択図】図2
特許請求の範囲
【請求項1】
弾性付与プロセスの制御方法であって、
弾性付与プロセスフローにおける複数の時点の所定制御パラメーターを順次収集して、第1の制御パラメーターシーケンスを取得することと、
前記第1の制御パラメーターシーケンスをパラメーター予測モデルに入力して、将来の複数の時点の予測パラメーターを予測することと、
前記複数の時点の予測パラメーターから対象時点の対象パラメーターを選択することと、
前記対象時点前後の複数の時点の制御パラメーターに基づいて、前記対象パラメーターを含む第2の制御パラメーターシーケンスを構築することと、
指標予測モデルに基づいて前記第2の制御パラメーターシーケンスを処理し、指標予測結果を取得することと、
前記指標予測結果が所望値を満たさない場合、前記指標予測結果をデータ生成モデルに入力して、前記対象時点に対する所望の制御パラメーターを取得することとを含む、弾性付与プロセスの制御方法。
続きを表示(約 4,300 文字)
【請求項2】
前記指標予測モデルに基づいて前記第2の制御パラメーターシーケンスを処理し、指標予測結果を取得することは、
前記第2の制御パラメーターシーケンスの各時点の制御パラメーターに基づいて、対応する弾性付与プロセスアーキテクチャチャートを生成し、複数の弾性付与プロセスアーキテクチャチャートを取得すことと、
前記複数の弾性付与プロセスアーキテクチャチャートを前記指標予測モデルに入力して前記指標予測結果を取得することとを含む、請求項1に記載の方法。
【請求項3】
前記第2の制御パラメーターシーケンスの各時点の制御パラメーターに基づいて、対応する弾性付与プロセスアーキテクチャチャートを生成し、複数の弾性付与プロセスアーキテクチャチャートを取得することは、
前記第2の制御パラメーターシーケンスの各時点の制御パラメーターに対して、それぞれ以下の操作を実行して、対応する弾性付与プロセスアーキテクチャチャートを生成することを含み、
前記操作は、
前記制御パラメーターにおける複数のサブパラメーターに対してそれぞれ正規化操作を行い、前記サブパラメーターを所定の値区間にマッピングし、前記サブパラメーターの正規化値を取得することと、
POY糸の弾性付与プロセスにおける加工経路を等比例で初期化画像にスケーリングして、前記時点に対応する弾性付与プロセスアーキテクチャチャートを取得することとを含み、
ここで、弾性付与プロセスアーキテクチャチャートにおける加工経路以外の画素点の値は、デフォルト値を取り、加工経路上の前記制御パラメーターにおけるサブパラメーターに対応する点は、前記サブパラメーターの正規化値に設定され、加工経路上の前記制御パラメーターにおけるサブパラメーター以外の点は、前記デフォルト値と異なる対象値に設定される、請求項2に記載の方法。
【請求項4】
前記複数の弾性付与プロセスアーキテクチャチャートを前記指標予測モデルに入力して前記指標予測結果を取得することは、
前記指標予測モデルにおけるアテンションメカニズムにより構築された短期的特徴抽出モジュールに基づいて、前記複数の弾性付与プロセスアーキテクチャチャートにおける第1の特徴抽出範囲内で特徴の抽出を行い、短期的特徴を取得することであって、ここで、前記第1の特徴抽出範囲は、前記対象時点の弾性付与プロセスアーキテクチャチャートを中心とするn個の時点の弾性付与プロセスアーキテクチャチャートを含み、nは、正の整数であり、前記短期的特徴抽出モジュールは、前記対象時点の弾性付与プロセスアーキテクチャチャートをクエリ特徴とし、前記n個の時点における前記対象時点を除いた時点の弾性付与プロセスアーキテクチャチャートをキー特徴及びバリュー特徴とし、前記短期的特徴を取得するためのものである、短期的特徴を取得することと、
前記指標予測モデルにおけるアテンションメカニズムにより構築された長期的特徴抽出モジュールに基づいて、前記複数の弾性付与プロセスアーキテクチャチャートにおける第2の特徴抽出範囲内で特徴の抽出を行い、長期的特徴を取得することであって、ここで、前記第2の特徴抽出範囲は、前記対象時点の弾性付与プロセスアーキテクチャチャートを中心とするm個の時点の弾性付与プロセスアーキテクチャチャートを含み、mは、nよりも大きい正の整数であり、前記長期的特徴抽出モジュールは、スライディングウィンドウメカニズムを用いて前記m個の時点の弾性付与プロセスアーキテクチャチャートを分割し、各スライディングウィンドウ内のプーリング情報を確定し、複数のスライディングウィンドウのプーリング情報に基づいてアテンションメカニズムに必要なキー特徴及びバリュー特徴を構築し、前記キー特徴、前記バリュー特徴、及び前記クエリ特徴に基づいて前記長期的特徴を取得するためのものである、長期的特徴を取得することと、
融合モジュールを用いて前記長期的特徴及び前記短期的特徴に対して融合操作を行い、融合特徴を取得することと、
指標予測モデルにおける予測モジュールに基づいて前記融合特徴を処理して、前記指標予測結果を取得することと、
を含む、請求項2に記載の方法。
【請求項5】
前記指標予測モデルは、補充特徴抽出モジュールをさらに含み、
前記方法は、さらに、
前記補充特徴抽出モジュールに基づいて以下の操作を実行し、補充特徴を取得することを含み、
前記操作は、
前記第2の制御パラメーターシーケンスに対してデータの分析を行い、前記第2の制御パラメーターシーケンスにおける各時点の、前記第2の制御パラメーターシーケンスにおける第1の時点に対するパラメーターの累積差を取得して累積差シーケンスを取得することと、
前記累積差シーケンスに基づいて、累積差が所定閾値よりも大きい時点の、前記第1の時点に対する時間長を確定し、時間長シーケンスを取得することと、
前記第2の制御パラメーターシーケンス、前記累積差シーケンス及び前記時間長シーケンスに対して特徴の抽出を行い、前記補充特徴を取得することと、
を含み、
前記融合モジュールを用いて前記長期的特徴及び前記短期的特徴に対して融合操作を行い、融合特徴を取得することは、
融合モジュールを用いて前記長期的特徴、前記短期的特徴及び前記補充特徴に対して融合操作を行い、前記融合特徴を取得することを含む、請求項4に記載の方法。
【請求項6】
前記指標予測結果は、巻糸パッケージの等級、合格率、満巻率及び染色均一性のうちの少なくとも1つを含む、請求項1~5のいずれか1項に記載の方法。
【請求項7】
弾性付与プロセスの制御ネットワークの訓練方法であって、
前記制御ネットワークは、パラメーター予測サブネットワーク、指標予測サブネットワーク及びデータ生成サブネットワークを含み、
前記方法は、
弾性付与プロセスの複数の時点における所定制御パラメーターを含む第1の訓練サンプルを取得することと、
前記第1の訓練サンプルを前記パラメーター予測サブネットワークに入力して、将来の少なくとも1つの時点のパラメーター予測値を取得することと、
前記指標予測サブネットワークに基づいて前記パラメーター予測値を処理し、予測指標を取得することと、
前記予測指標と実の指標との間の差分、及び前記パラメーター予測値と実のパラメーター値との間の差分に基づいて、訓練損失を確定することと、
前記訓練損失に基づいて前記パラメーター予測サブネットワーク及び前記指標予測サブネットワークを調整することと、
訓練収束条件を満たす場合、前記パラメーター予測サブネットワークに対応するパラメーター予測モデル、及び前記指標予測サブネットワークに対応する指標予測モデルを取得することと、
前記パラメーター予測モデル及び前記指標予測モデルに基づいて、前記データ生成サブネットワークを訓練して、データ生成モデルを取得することと、
を含み、
前記データ生成モデルは、前記指標予測モデルから出力された指標予測結果に基づいて、弾性付与機の所望の制御パラメーターを生成するためのものである、弾性付与プロセスの制御ネットワークの訓練方法。
【請求項8】
前記データ生成サブネットワークは、訓練待ち生成器及び訓練待ち判別器を含み、
前記パラメーター予測モデル及び前記指標予測モデルに基づいて、前記データ生成サブネットワークを訓練して、データ生成モデルを取得することは、
前記データ生成ネットワークに対して複数回の訓練を行うことを含み、
各回の前記訓練は、以下の操作を実行し、
前記操作は、
真の制御パラメーターを前記訓練待ち判別器に入力して、前記訓練待ち判別器による前記真の制御パラメーターに対する第1の判別結果を取得することと、
前記訓練待ち生成器を用いて偽の制御パラメーターを生成することと、
前記偽の制御パラメーターを前記訓練待ち判別器に入力して、第2の判別結果を取得することと、
前記第1の判別結果及び前記第2の判別結果に基づいて前記訓練待ち判別器のモデルパラメーターを調整することと、
前記訓練待ち判別器のモデルパラメーターを固定し、前記訓練待ち生成器を訓練することと、
を含む、請求項7に記載の方法。
【請求項9】
弾性付与プロセスの制御装置であって、
弾性付与プロセスフローにおける複数の時点の所定制御パラメーターを順次収集して、第1の制御パラメーターシーケンスを取得するための収集ユニットと、
前記第1の制御パラメーターシーケンスをパラメーター予測モデルに入力して、将来の複数の時点の予測パラメーターを予測するためのパラメーター予測ユニットと、
前記複数の時点の予測パラメーターから対象時点の対象パラメーターを選択するための選択ユニットと、
前記対象時点前後の複数の時点の制御パラメーターに基づいて、前記対象パラメーターを含む第2の制御パラメーターシーケンスを構築するための構築ユニットと、
指標予測モデルに基づいて前記第2の制御パラメーターシーケンスを処理し、指標予測結果を取得するための指標予測ユニットと、
前記指標予測結果が所望値を満たさない場合、前記指標予測結果をデータ生成モデルに入力して、前記対象時点に対する所望の制御パラメーターを取得するためのデータ生成ユニットとを含む、弾性付与プロセスの制御装置。
【請求項10】
前記指標予測ユニットは、
前記第2の制御パラメーターシーケンスの各時点の制御パラメーターに基づいて、対応する弾性付与プロセスアーキテクチャチャートを生成し、複数の弾性付与プロセスアーキテクチャチャートを取得するための生成サブユニットと、
前記複数の弾性付与プロセスアーキテクチャチャートを前記指標予測モデルに入力して、前記指標予測結果を取得するための予測サブユニットと、
を含む、請求項9に記載の装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、データ処理の技術分野に関し、特に、弾性付与プロセスの制御方法、制御ネットワークの訓練方法及び関連装置に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
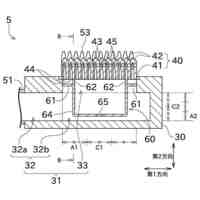
弾性付与(仮撚)プロセスでは、後続の運送・管理の便宜上、POY原糸と略称されるPOY(Pre Oriented Yarn、予配向糸)をDTY(Draw Textured Yarn、引張変形糸)に加工し、DTY糸を紙製糸巻きに巻き取り、DTY巻糸パッケージを形成する。
【0003】
弾性付与プロセスには多くの被制御部材が存在しており、対応する部材のパラメーター設定及び管理制御は、最終的な巻糸パッケージの品質に重要な影響を与える。
【発明の概要】
【0004】
本開示は、弾性付与プロセスフローを改善するための弾性付与プロセスの制御方法、制御ネットワークの訓練方法及び関連装置を提供する。
【0005】
本開示の一態様によれば、弾性付与プロセスの制御方法を提供し、制御方法は、
弾性付与プロセスフローにおける複数の時点の所定制御パラメーターを順次収集して、第1の制御パラメーターシーケンスを取得することと、
第1の制御パラメーターシーケンスをパラメーター予測モデルに入力して、将来の複数の時点の予測パラメーターを予測することと、
複数の時点の予測パラメーターから対象時点の対象パラメーターを選択することと、
対象時点前後の複数の時点の制御パラメーターに基づいて、対象パラメーターを含む第2の制御パラメーターシーケンスを構築することと、
指標予測モデルに基づいて第2の制御パラメーターシーケンスを処理し、指標予測結果を取得することと、
指標予測結果が所望値を満たさない場合、指標予測結果をデータ生成モデルに入力して、対象時点に対する所望の制御パラメーターを取得することとを含む。
【0006】
本開示の一態様によれば、弾性付与プロセスの制御ネットワークの訓練方法を提供し、制御ネットワークは、パラメーター予測サブネットワーク、指標予測サブネットワーク及びデータ生成サブネットワークを含み、当該方法は、
弾性付与プロセスの複数の時点における所定制御パラメーターを含む第1の訓練サンプルを取得することと、
第1の訓練サンプルをパラメーター予測サブネットワークに入力して、将来の少なくとも1つの時点のパラメーター予測値を取得することと、
指標予測サブネットワークに基づいてパラメーター予測値を処理し、予測指標を取得することと、
予測指標と実の指標との間の差分、及びパラメーター予測値と実のパラメーター値との間の差分に基づいて、訓練損失を確定することと、
訓練損失に基づいてパラメーター予測サブネットワーク及び指標予測サブネットワークを調整することと、
訓練収束条件を満たす場合、パラメーター予測サブネットワークに対応するパラメーター予測モデル、及び指標予測サブネットワークに対応する指標予測モデルを取得することと、
パラメーター予測モデル及び指標予測モデルに基づいて、データ生成サブネットワークを訓練して、データ生成モデルを取得することとを含み、
データ生成モデルは、指標予測モデルから出力された指標予測結果に基づいて、弾性付与機の所望の制御パラメーターを生成するためのものである。
【0007】
本開示の別の態様によれば、弾性付与プロセスの制御装置を提供し、制御装置は、
弾性付与プロセスにおける複数の時点の所定制御パラメーターを順次収集して、第1の制御パラメーターシーケンスを取得するための収集ユニットと、
第1の制御パラメーターシーケンスをパラメーター予測モデルに入力して、将来の複数の時点の予測パラメーターを予測するためのパラメーター予測ユニットと、
複数の時点の予測パラメーターから対象時点の対象パラメーターを選択するための選択ユニットと、
対象時点前後の複数の時点の制御パラメーターに基づいて、対象パラメーターを含む第2の制御パラメーターシーケンスを構築するための構築ユニットと、
指標予測モデルに基づいて第2の制御パラメーターシーケンスを処理し、指標予測結果を取得するための指標予測ユニットと、
指標予測結果が所望値を満たさない場合、指標予測結果をデータ生成モデルに入力して、対象時点に対する所望の制御パラメーターを取得するためのデータ生成ユニットとを含む。
【0008】
本開示の一態様によれば、弾性付与プロセスの制御ネットワークの訓練装置を提供し、制御ネットワークは、パラメーター予測サブネットワーク、指標予測サブネットワーク及びデータ生成サブネットワークを含み、当該装置は、
弾性付与プロセスの複数の時点における所定制御パラメーターを含む第1の訓練サンプルを取得するための取得ユニットと、
第1の訓練サンプルをパラメーター予測サブネットワークに入力して、将来の少なくとも1つの時点のパラメーター予測値を取得するための入力ユニットと、
指標予測サブネットワークに基づいてパラメーター予測値を処理し、予測指標を取得するための処理ユニットと、
予測指標と実の指標との間の差分、及びパラメーター予測値と実のパラメーター値との間の差分に基づいて、訓練損失を確定するための訓練損失ユニットと、
訓練損失に基づいてパラメーター予測サブネットワーク及び指標予測サブネットワークを調整するための調整ユニットと、
訓練収束条件を満たす場合、パラメーター予測サブネットワークに対応するパラメーター予測モデル、及び指標予測サブネットワークに対応する指標予測モデルを取得するための第1の生成ユニットと、
パラメーター予測モデル及び指標予測モデルに基づいて、データ生成サブネットワークを訓練して、データ生成モデルを取得するための第2の生成ユニットとを含み、
データ生成モデルは、指標予測モデルから出力された指標予測結果に基づいて、弾性付与機の所望の制御パラメーターを生成するためのものである。
【0009】
本開示の別の態様によれば、電子機器を提供し、電子機器は、
少なくとも1つのプロセッサーと、
少なくとも1つのプロセッサーに通信可能に接続されたメモリとを含み、
該メモリには、該少なくとも1つのプロセッサーによって実行可能な指令が記憶されており、該命令は、該少なくとも1つのプロセッサーに本開示のいずれかの実施例の方法を実行させるように、該少なくとも1つのプロセッサーによって実行される。
【0010】
本開示の別の態様によれば、コンピューター指令が記憶されている非一時的なコンピューター読み取り可能な記憶媒体を提供し、当該コンピューター指令は、当該コンピューターに本開示のいずれかの実施例に係る方法を実行させるためのものである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
TMTマシナリー株式会社
交絡装置及び紡糸引取機
25日前
東北整練株式会社
紙糸及び紙糸の製造方法
4日前
勤倫股フン有限公司
ガラス微小球の落下を防止する反射糸
13日前
倉敷紡績株式会社
清涼性混紡紡績糸及びこれを用いた清涼性生地
25日前
三菱ケミカル株式会社
炭素繊維シートモールディングコンパウンドの製造方法および炭素繊維シートモールディングコンパウンドの製造装置
8日前
ユニバーシティー オブ マサチューセッツ
O-メチルリッチ完全安定化オリゴヌクレオチド
11日前
日立建機株式会社
部品需要予測装置
8日前
他の特許を見る


 特許ウォッチ
特許ウォッチ