TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025103834
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221485
出願日
2023-12-27
発明の名称
誘導機制御装置
出願人
東洋電機製造株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
H02P
21/24 20160101AFI20250702BHJP(電力の発電,変換,配電)
要約
【課題】誘導機のトルク制御の精度向上を図るとともに、誘導機が指令に対して逆方向に回転することを防ぐ。
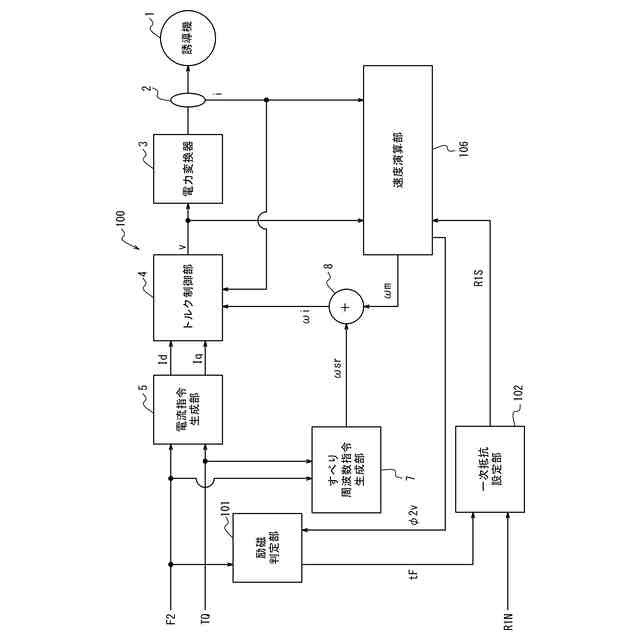
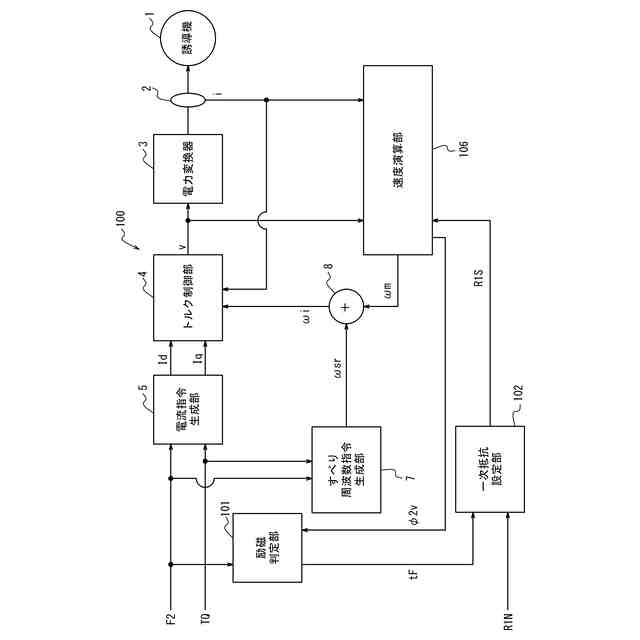
【解決手段】誘導機制御装置100は、一次抵抗設定値R1Sと、誘導機1に流れる電流iと、電圧指令vとに基づき、誘導機速度ωmと演算磁束大きさφ2vとを演算する速度演算部106と、磁束指令F2に対する演算磁束大きさφ2vの比率が、所定の値に達するまでの励磁経過時間tFを生成する励磁判定部101と、励磁経過時間tFに基づき、一次抵抗設定値R1Sを設定する一次抵抗設定部102と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
誘導機を制御する誘導機制御装置であって、
前記誘導機に流れる電流を検出する電流検出器と、
前記誘導機の一次抵抗設定値と、前記電流検出器により検出された電流と、前記誘導機への出力電圧を指示する電圧指令とに基づき、前記誘導機の誘導機速度と演算磁束大きさとを演算する速度演算部と、
磁束指令とトルク指令とに基づき、前記誘導機のすべり周波数を指示するすべり周波数指令を生成するすべり周波数指令生成部と、
前記誘導機速度と前記すべり周波数指令とを加算した周波数指令を生成する加算器と、
前記磁束指令と前記トルク指令とに基づき、磁束分電流指令と、トルク分電流指令とを生成する電流指令生成部と、
前記周波数指令と、前記電流検出器により検出された電流と、前記磁束分電流指令と、前記トルク分電流指令とに基づき、前記電圧指令を生成するトルク制御部と、
前記磁束指令に対する前記演算磁束大きさの比率が、所定の値に達するまでの時間である励磁経過時間を生成する励磁判定部と、
前記励磁経過時間に基づき、前記一次抵抗設定値を設定する一次抵抗設定部と、を備える誘導機制御装置。
続きを表示(約 480 文字)
【請求項2】
請求項1に記載の誘導機制御装置において、
前記一次抵抗設定部は、前記励磁経過時間が所定の値を超えるまでは、一次抵抗基準値を前記一次抵抗設定値と設定し、前記励磁経過時間が前記所定の値を超えると、前記一次抵抗基準値に1未満の正数を乗算した値を前記一次抵抗設定値と設定する、誘導機制御装置。
【請求項3】
請求項1に記載の誘導機制御装置において、
前記電流をi、前記電圧指令をv、前記一次抵抗設定値をR1S、前記誘導機の二次抵抗をR2、一次自己インダクタンスをL1、二次自己インダクタンスをL2、相互インダクタンスをMとすると、
前記速度演算部は、
以下の式(1)により、誘導機磁束φ2Cを演算し、
前記誘導機速度をωmとし、前記誘導機磁束φ2Cのa軸成分およびb軸成分をそれぞれ、FAC,FBCとすると、
以下の式(2)~(5)により、前記誘導機速度ωmを演算する、誘導機制御装置。
JPEG
2025103834000009.jpg
80
170
発明の詳細な説明
【技術分野】
【0001】
本発明は、誘導機を制御する誘導機制御装置に関する。
続きを表示(約 830 文字)
【背景技術】
【0002】
図2は、従来の誘導機制御装置10の構成例を示す図である。図2に示すように、従来の誘導機制御装置10は、電流検出器2と、電力変換器3と、トルク制御部4と、電流指令生成部5と、速度演算部6と、すべり周波数指令生成部7と、加算器8とを備える。
【0003】
電流検出器2は、誘導機1に流れる電流iを検出し、検出結果をトルク制御部4および速度演算部6に出力する。
【0004】
速度演算部6は、電流検出器2による電流iの検出結果と、誘導機1への出力電圧を指示する電圧指令vと、誘導機1の一次抵抗の基準値である一次抵抗基準値R1Nとが入力される。速度演算部6は、一次抵抗基準値R1Nと、電流iと、電圧指令vとに基づき、誘導機速度ωmを演算する。
【0005】
具体的には、速度演算部6は、以下の式(1)により、演算磁束φ2を演算する。
【0006】
JPEG
2025103834000002.jpg
14
170
【0007】
ここで、L2は誘導機1の二次自己インダクタンスであり、Mは誘導機1の相互インダクタンスであり、Lekは、誘導機1の漏れインダクタンスである。漏れインダクタンスLekは、以下の式(2)で与えられる。
【0008】
JPEG
2025103834000003.jpg
15
170
【0009】
次に、速度演算部6は、電流iと、演算磁束φ2とに基づき、以下の式(3)~式(5)により、誘導機速度ωmを演算する。式(3)において、FAおよびFBは、演算磁束φ2のa軸成分およびb軸成分である。
【0010】
JPEG
2025103834000004.jpg
49
170
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東洋電機製造株式会社
誘導機制御装置
1か月前
他の特許を見る
 特許ウォッチ
特許ウォッチ