TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085129
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023198792
出願日
2023-11-24
発明の名称
作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
E02F
9/26 20060101AFI20250529BHJP(水工;基礎;土砂の移送)
要約
【課題】表示画面の視認性が低下しにくい、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械を提供する。
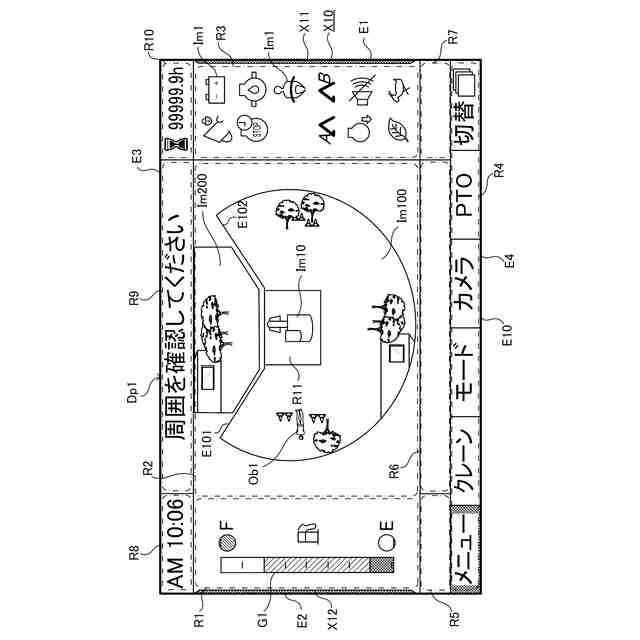
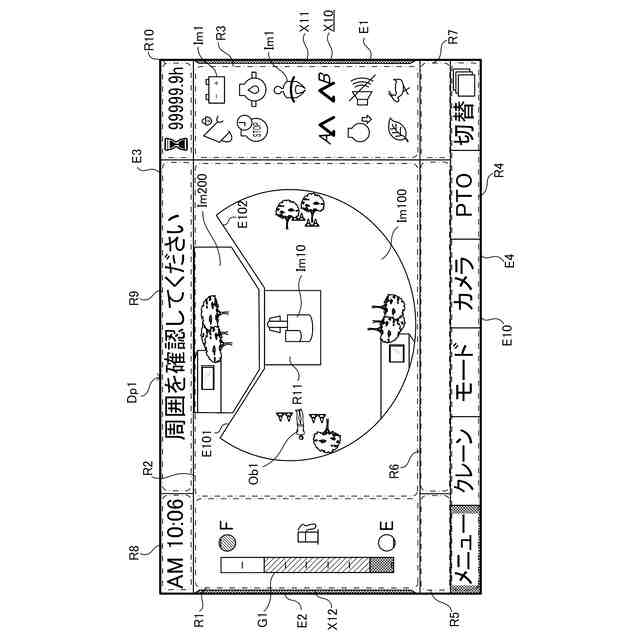
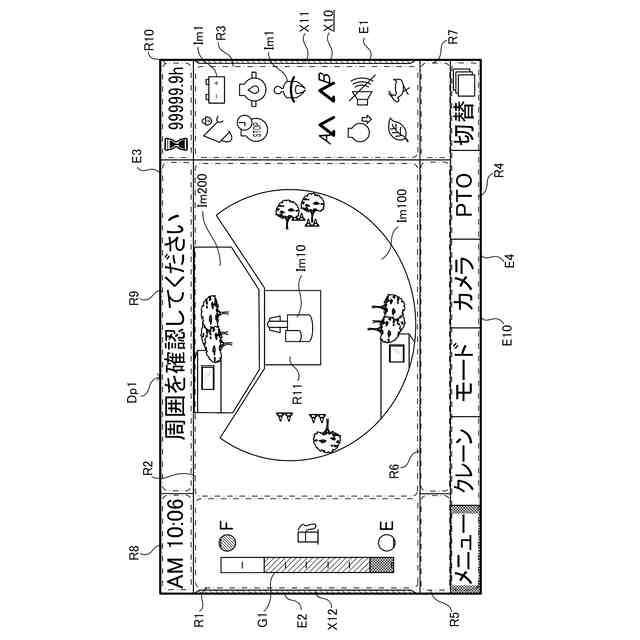
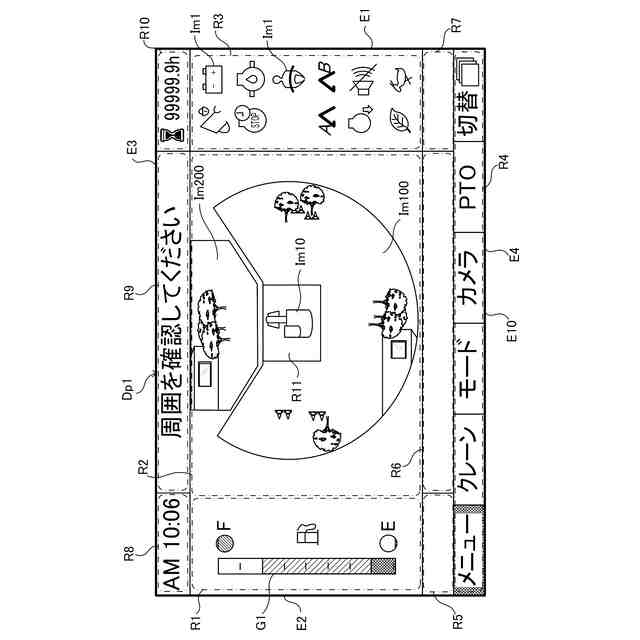
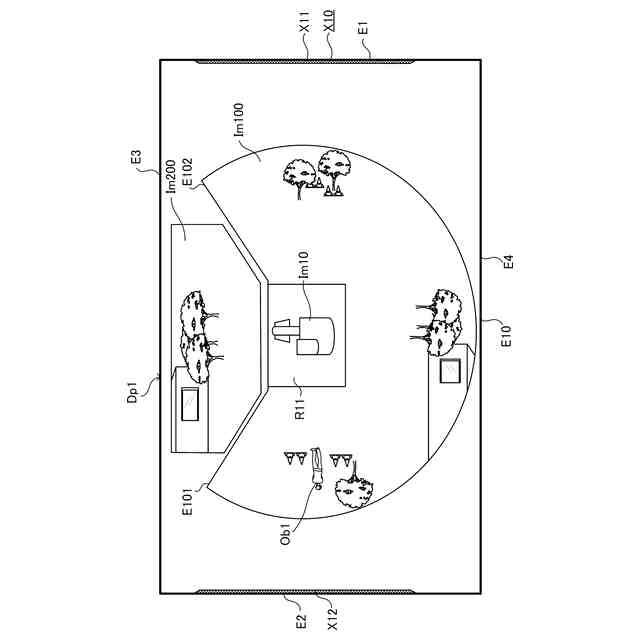
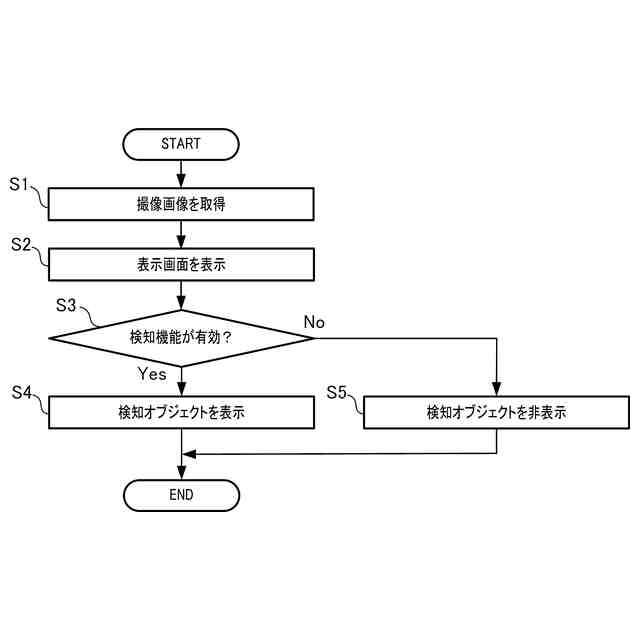
【解決手段】作業機械の制御方法は、作業機械の周囲の監視エリアにおける検知対象物Ob1を検知することと、表示画面Dp1を表示装置に表示させることと、検知対象物Ob1の検知結果に応じて表示態様が変化する検知オブジェクトX10を表示画面Dp1に表示させることと、を有する。検知オブジェクトX10は、表示画面Dp1の外周縁E10に沿って配置されている。
【選択図】図5
特許請求の範囲
【請求項1】
作業機械の周囲の監視エリアにおける検知対象物を検知することと、
表示画面を表示装置に表示させることと、
前記検知対象物の検知結果に応じて表示態様が変化する検知オブジェクトを前記表示画面に表示させることと、を有し、
前記検知オブジェクトは、前記表示画面の外周縁に沿って配置されている、
作業機械の制御方法。
続きを表示(約 930 文字)
【請求項2】
前記検知対象物を検知可能な状態にある場合に、前記検知オブジェクトを前記表示画面に表示する、
請求項1に記載の作業機械の制御方法。
【請求項3】
カットオフレバーにより前記作業機械が操作不能な状態にある場合に、前記検知オブジェクトを非表示にする、
請求項2に記載の作業機械の制御方法。
【請求項4】
前記検知対象物の検知結果によらず、前記表示画面における前記検知オブジェクトの表示位置は固定である、
請求項1~3のいずれか1項に記載の作業機械の制御方法。
【請求項5】
前記検知オブジェクトは、少なくとも一方向において対称に配置される第1オブジェクト及び第2オブジェクトを含む、
請求項1~3のいずれか1項に記載の作業機械の制御方法。
【請求項6】
前記外周縁は、前記表示画面の左右方向に対向する第1縦辺と第2縦辺とを含み、
前記第1オブジェクトは、前記第1縦辺に沿って配置され、
前記第2オブジェクトは、前記第2縦辺に沿って配置される、
請求項5に記載の作業機械の制御方法。
【請求項7】
前記表示画面は、前記検知オブジェクトの上下方向の少なくとも一方側に情報提示領域を有する、
請求項6に記載の作業機械の制御方法。
【請求項8】
前記表示画面における前記第1オブジェクトと前記第2オブジェクトとの間の位置に、前記監視エリアの撮像画像を表示すること、を更に有する、
請求項5に記載の作業機械の制御方法。
【請求項9】
前記表示画面における前記第1オブジェクトと前記撮像画像との間の位置に、前記作業機械の状態に関する第1状態情報を表示すること、を更に有する、
請求項8に記載の作業機械の制御方法。
【請求項10】
前記表示画面における前記第2オブジェクトと前記撮像画像との間の位置に、前記作業機械の状態に関する第2状態情報を表示すること、を更に有する、
請求項8に記載の作業機械の制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、周囲の監視エリアにおける検知対象物を検知する機能を有する作業機械に用いられる、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
関連技術として、周囲に存在する物体を検知可能な作業機械(作業車両)が知られている(例えば、特許文献1参照)。関連技術に係る作業機械は、作業機械の周囲の画像を表示部に表示する。検知装置(検出装置)が作業機械の周囲に存在する物体を検知すると、表示部には、周囲の画像に縁取り加工を施した縁取り画像が表示される。
【先行技術文献】
【特許文献】
【0003】
特開2022-175822号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記関連技術では、縁取り画像が表示されることによって、表示画面における実質的に情報を表示可能な領域が一回り小さくなり、例えば、作業機械の状態に関する状態情報等の視認性が低下する場合がある。
【0005】
本発明の目的は、表示画面の視認性が低下しにくい、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械を提供することにある。
【課題を解決するための手段】
【0006】
本発明の一態様に係る作業機械の制御方法は、作業機械の周囲の監視エリアにおける検知対象物を検知することと、表示画面を表示装置に表示させることと、前記検知対象物の検知結果に応じて表示態様が変化する検知オブジェクトを前記表示画面に表示させることと、を有する。前記検知オブジェクトは、前記表示画面の外周縁に沿って配置されている。
【0007】
本発明の一態様に係る作業機械用制御プログラムは、前記作業機械の制御方法を、1以上のプロセッサに実行させるためのプログラムである。
【0008】
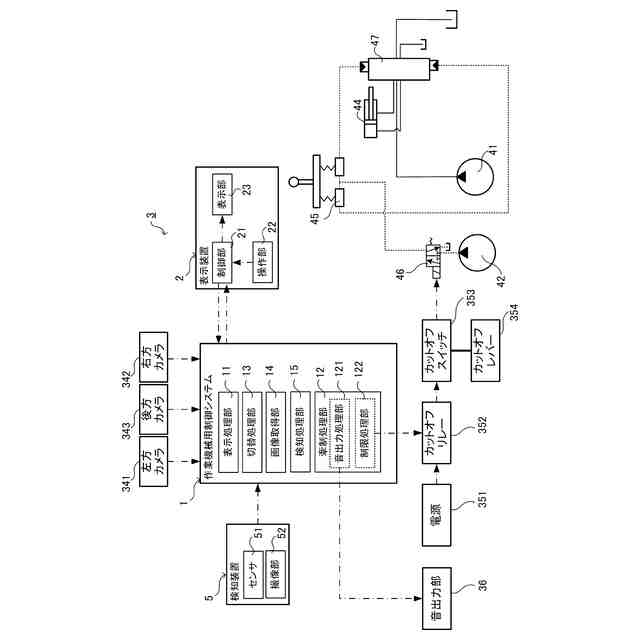
本発明の一態様に係る作業機械用制御システムは、検知処理部と、表示処理部と、を備える。前記検知処理部は、作業機械の周囲の監視エリアにおける検知対象物を検知する。前記表示処理部は、表示画面を表示装置に表示させる。前記表示処理部は、前記検知対象物の検知結果に応じて表示態様が変化する検知オブジェクトを前記表示画面に表示させる。前記検知オブジェクトは、前記表示画面の外周縁に沿って配置されている。
【0009】
本発明の一態様に係る作業機械は、前記作業機械用制御システムと、前記表示装置が搭載される機体と、を備える。
【発明の効果】
【0010】
本発明によれば、表示画面の視認性が低下しにくい、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
九州防災メンテナンス株式会社
グラウト注入具及び石積補修工法
2日前
他の特許を見る

 特許ウォッチ
特許ウォッチ