TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025031848
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2024225548,2021162144
出願日
2024-12-20,2021-09-30
発明の名称
車両制御システム
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20250228BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】 作業ロスの発生を防止する車両制御システムを提供する。
【解決手段】
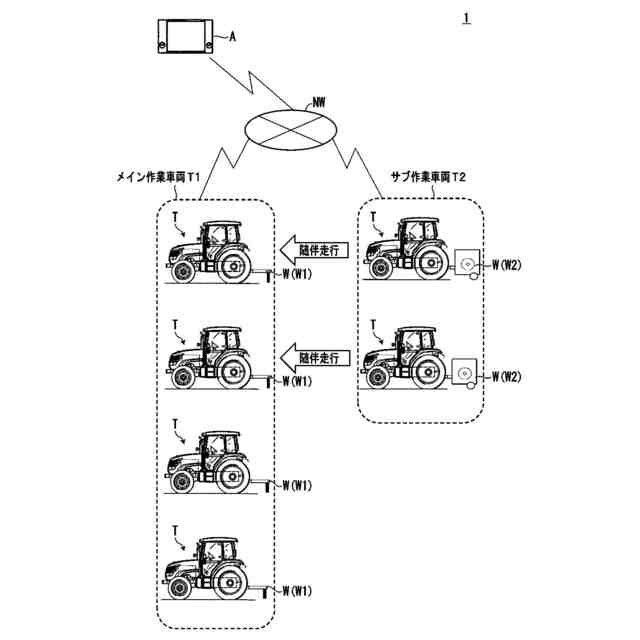
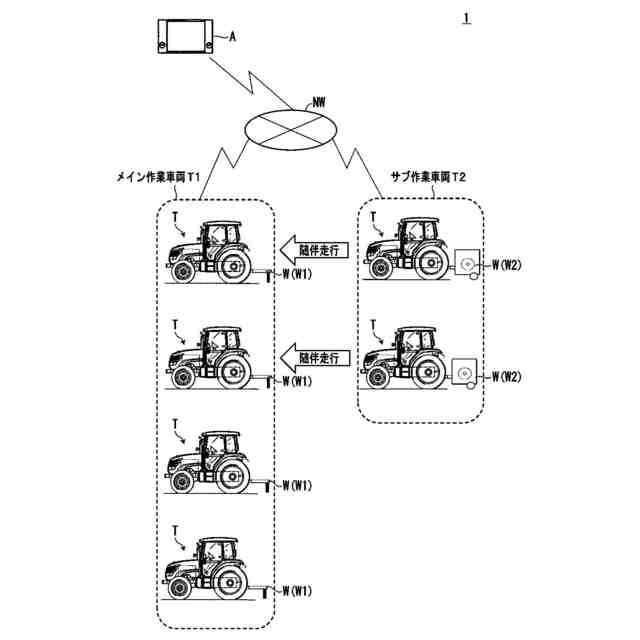
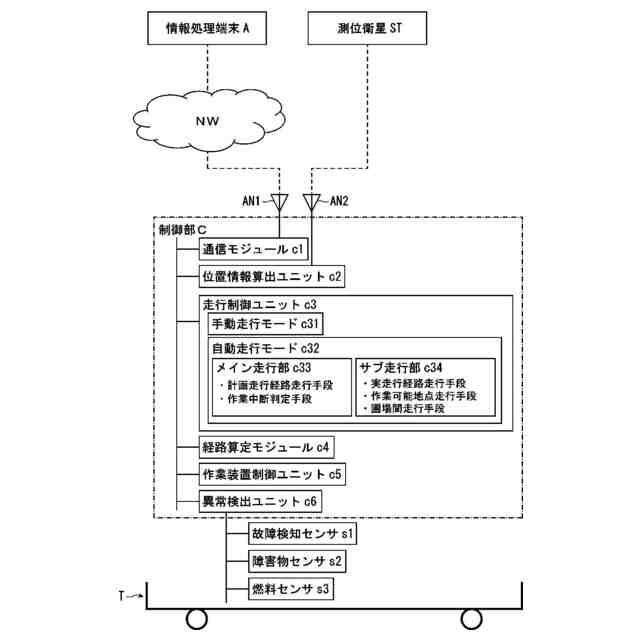
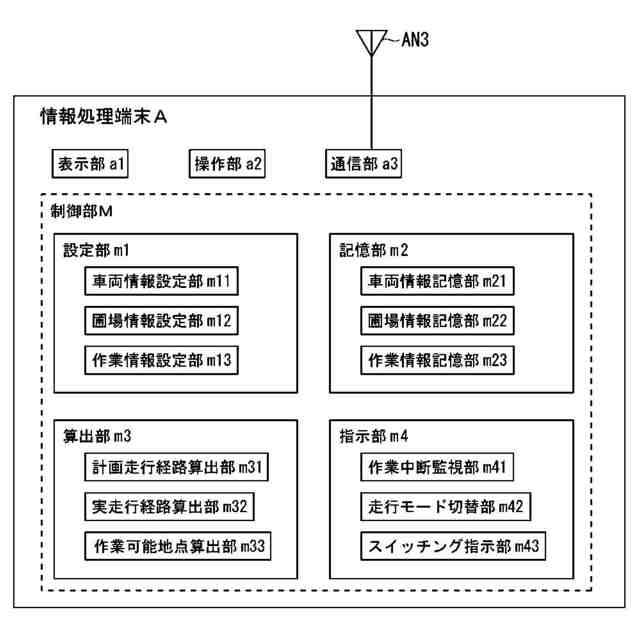
圃場Fを自動走行可能に構成された複数のメイン作業車両T1と、一のメイン作業車両T1と連係されて随伴走行するサブ作業車両T2と、前記メイン作業車両T1及びサブ作業車両T2と情報を送受可能な情報処理端末Aとを備え、前記情報処理端末Aは、前記メイン作業車両T1から作業中断したことを知らせる作業中断信号を受信すると
、前記
作業中断したメイン作業車両T1から、他の連係可能なメイン作業車両T1へと、前記サブ作業車両T2の連係を切替えることを特徴とする車両制御システム1の提供によって、上記課題が解決される。
【選択図】 図1
特許請求の範囲
【請求項1】
圃場を自動走行可能に構成された複数のメイン作業車両と、
一のメイン作業車両と連係されて随伴走行するサブ作業車両と、
前記メイン作業車両及びサブ作業車両と情報を送受可能な情報処理端末とを備え、
前記情報処理端末は、前記メイン作業車両から作業中断したことを知らせる作業中断信号を受信すると、
前記
作業中断したメイン作業車両から、他の連係可能なメイン作業車両へと、前記サブ作業車両の連係を切替えることを特徴とする車両制御システム。
続きを表示(約 320 文字)
【請求項2】
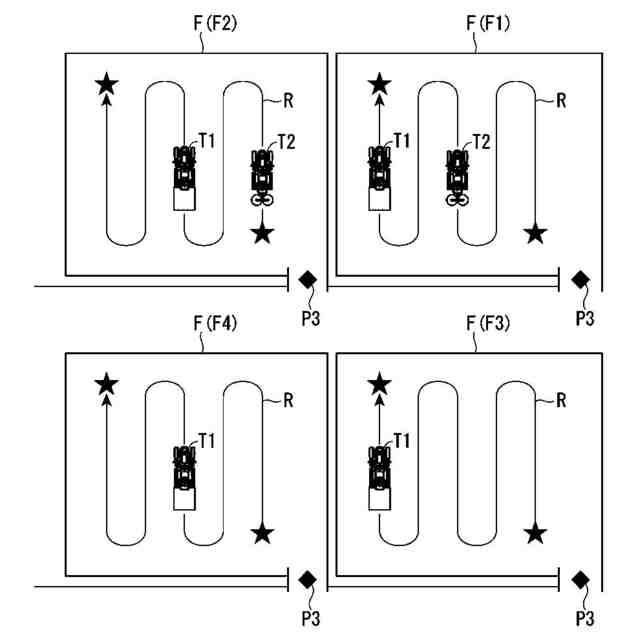
前記連係可能なメイン作業車両と、前記作業中断したメイン作業車両が異なる圃場に存在する場合、前記サブ作業車両を、前記連係可能なメイン作業車両の圃場へと移動させることを特徴とする請求項1に記載の車両制御システム。
【請求項3】
前記連係可能なメイン作業車両の圃場へと移動させるとき、前記サブ作業車両の位置を復帰位置として記憶させるよう構成されたことを特徴とする請求項2に記載の車両制御システム。
【請求項4】
圃場ごとに作業優先順位を付与し、前記サブ作業車両の移動先候補として複数の圃場が存在する場合、作業優先順位の高い圃場に移動することを特徴とする請求項2または3に記載の車両制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、農作業を行う作業車両を制御する車両制御システムに関するものである。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
近年、農業従事者の高齢化や労働力不足により耕作放棄地が増加していく中で、新規参入者や規模拡大を志向する次世代の担い手に効率的に農地を集約していくことが重要な課題となっている。そのような時代背景の中、2021年現在において、我が国における農家1戸当たりの農地面積は増加傾向にあり、今後もこの傾向は継続するものと予測されている。これに応じて、ロボット技術やICTを活用して超省力・高品質生産を実現するスマート農業への関心が益々高まっている。
【0003】
ここで、圃場で農作業を行う作業車両の技術分野においては、例えば、下記特許文献1に示されるように、GPS等の測位衛星システムを利用して、作業車両の現在位置を判定し、作業車両を無人操縦により走行させる車両制御システムが、従来から知られている。
【0004】
さらに、この技術を応用し、有人操縦される作業車両(以下、有人作業車という。)と、無人操縦される作業車両(以下、無人作業車という。)とを連係し、より効率的に農作業を行うように構成された作業車両の制御システムが知られている。
【0005】
例えば、下記特許文献2には、有人作業車の実際の走行位置に基づいて順次目標走行位置を決定し、その目標走行位置を目指して無人作業車を操縦する車両制御システムが開示されている。
【0006】
また、下記特許文献3には、無人作業車の走行位置に応じて、無人操縦される作業車両の走行軌跡を決定する車両制御システムが開示されている。
【先行技術文献】
【特許文献】
【0007】
特開平11-266608号公報
米国特許6,732,024号公報
特開2021-6009号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、有人作業車と無人作業車が連係するように構築された従来の車両制御システムにおいては、有人作業車が故障等の何らかの要因で停止した場合に、有人作業車と連係された無人作業車についても停止する必要がある。その結果、無人作業車が遊休状態となり、作業ロスが生じることとなる。
【0009】
そこで、本発明は、このような問題を解消し、作業ロスの発生を防止する車両制御システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
上記の目的を達成するため、本発明は、
圃場を自動走行可能に構成された複数のメイン作業車両と、
一のメイン作業車両と連係されて随伴走行するサブ作業車両と、
前記メイン作業車両及びサブ作業車両と情報を送受可能な情報処理端末とを備え、
前記情報処理端末は、前記メイン作業車両から作業中断したことを知らせる作業中断信号を受信すると、
前記
作業中断したメイン作業車両から、他の連係可能なメイン作業車両へと、前記サブ作業車両の連係を切替えることを特徴とする車両制御システムを提供する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
コンバイン
4日前
他の特許を見る
 特許ウォッチ
特許ウォッチ