TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025010430
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2024194202,2021158663
出願日
2024-11-06,2021-09-29
発明の名称
制御装置、ロボット制御方法及びプログラム
出願人
カシオ計算機株式会社
代理人
個人
主分類
A63H
11/00 20060101AFI20250109BHJP(スポーツ;ゲーム;娯楽)
要約
【課題】予め使用者を識別するためのデータが登録されていなくても、使用者に愛着をわかせるような動作を行う。
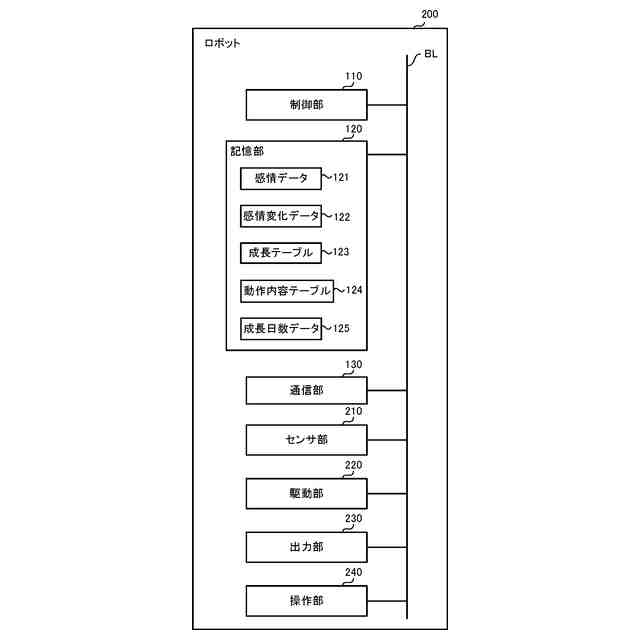
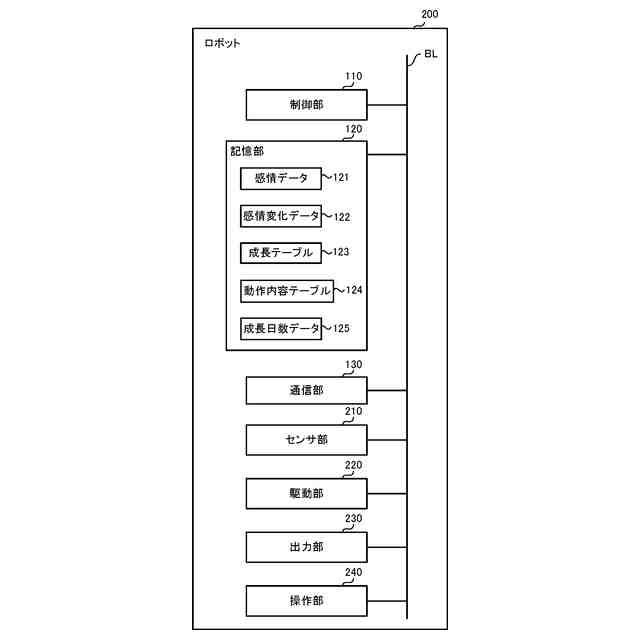
【解決手段】ロボット200は、記憶部120と制御部110とを備える。制御部110は、外部から作用する外部刺激の特徴量である外部刺激特徴量を取得し、取得された外部刺激特徴量を履歴として記憶部120に保存し、あるタイミングで取得された外部刺激特徴量と記憶部120に保存された外部刺激特徴量とを比較して第1類似度を算出し、算出された第1類似度に基づいて動作を制御する。
【選択図】図4
特許請求の範囲
【請求項1】
記憶部と制御部とを備え、
前記制御部は、
外部から作用する外部刺激の特徴量である外部刺激特徴量を取得し、
前記取得された外部刺激特徴量を履歴として前記記憶部に保存し、
あるタイミングで取得された外部刺激特徴量と前記記憶部に保存された外部刺激特徴量とを比較して第1類似度を算出し、
前記算出された第1類似度に基づいて動作を制御する、
ロボット。
続きを表示(約 1,300 文字)
【請求項2】
前記制御部は、
特定使用者からの前記外部刺激である特定刺激の特徴量である特定刺激特徴量を取得し、
前記取得された特定刺激特徴量を前記記憶部に保存し、
あるタイミングで取得された外部刺激特徴量と前記記憶部に保存された特定刺激特徴量とを比較して第2類似度を算出し、
前記算出された第2類似度にも基づいて動作を制御する、
請求項1に記載のロボット。
【請求項3】
前記制御部は、
前記外部刺激特徴量を先入れ先出し方式で履歴保存数まで履歴として前記記憶部に保存し、
前記記憶部に保存された外部刺激特徴量の新しい方から前記履歴保存数よりも少ない連続判定保存数の前記外部刺激特徴量である連続判定特徴量を取得し、
あるタイミングで取得された外部刺激特徴量と前記取得された連続判定特徴量とを比較して第3類似度を算出し、
前記算出された第3類似度にも基づいて動作を制御する、
請求項1又は2に記載のロボット。
【請求項4】
前記制御部は、
前記外部刺激として音声データを取得する、
請求項1から3のいずれか1項に記載のロボット。
【請求項5】
前記制御部は、
前記音声データをフーリエ変換して周波数スペクトルを取得し、
前記取得された周波数スペクトルをフーリエ変換して得られるケプストラムの一部を、前記外部刺激特徴量として取得する、
請求項4に記載のロボット。
【請求項6】
前記制御部は、
前記外部刺激として加速度及び複数の接触圧力を取得する、
請求項1から5のいずれか1項に記載のロボット。
【請求項7】
前記制御部は
前記加速度に基づいてロボットの向きを判定し、
前記判定された向きと前記複数の接触圧力とから前記外部刺激特徴量を取得する、
請求項6に記載のロボット。
【請求項8】
前記制御部は、
前記加速度の履歴から機械学習した識別器によって得られるロボットの向きと、あるタイミングで取得された加速度と、に基づいて、ロボットの向きを判定する、
請求項7に記載のロボット。
【請求項9】
外部から作用する外部刺激の特徴量である外部刺激特徴量を取得し、
前記取得された外部刺激特徴量を履歴として記憶部に保存し、
あるタイミングで取得された外部刺激特徴量と前記記憶部に保存された外部刺激特徴量とを比較して第1類似度を算出し、
前記算出された第1類似度に基づいて動作を制御する、
ロボット制御方法。
【請求項10】
コンピュータに、
外部から作用する外部刺激の特徴量である外部刺激特徴量を取得し、
前記取得された外部刺激特徴量を履歴として記憶部に保存し、
あるタイミングで取得された外部刺激特徴量と前記記憶部に保存された外部刺激特徴量とを比較して第1類似度を算出し、
前記算出された第1類似度に基づいて動作を制御する、
処理を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット、ロボット制御方法及びプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来から様々なロボットが開発されてきているが、近年は産業用ロボットだけでなく、ペットロボットのような民生用のロボットの開発も進んでいる。例えば、特許文献1には、容易かつ精度良く使用者を識別して、使用者に愛着をわかせることができるロボット装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2001-157985号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されているロボット装置は、圧力センサが検出した圧力検出信号のパターンと予め登録されている登録パターンとを比較して圧力センサを撫でた者が使用者であるか否かを判定する。したがって、予め登録パターンが登録されていないと使用者を識別することができず、使用者に愛着をわかせることができない。
【0005】
そこで、本発明はこのような事情に鑑みてなされたものであって、予め使用者を識別するためのデータが登録されていなくても、使用者に愛着をわかせるような動作を行うことができるロボット、ロボット制御方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
前記目的を達成するため、本発明に係るロボットの一様態は、
記憶部と制御部とを備え、
前記制御部は、
外部から作用する外部刺激の特徴量である外部刺激特徴量を取得し、
前記取得された外部刺激特徴量を履歴として前記記憶部に保存し、
あるタイミングで取得された外部刺激特徴量と前記記憶部に保存された外部刺激特徴量とを比較して第1類似度を算出し、
前記算出された第1類似度に基づいて動作を制御する。
【発明の効果】
【0007】
本発明によれば、予め使用者を識別するためのデータが登録されていなくても、使用者に愛着をわかせるような動作を行うことができる。
【図面の簡単な説明】
【0008】
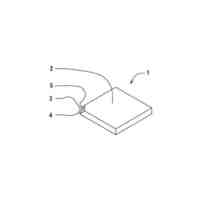
実施形態に係るロボットの外観を示す図である。
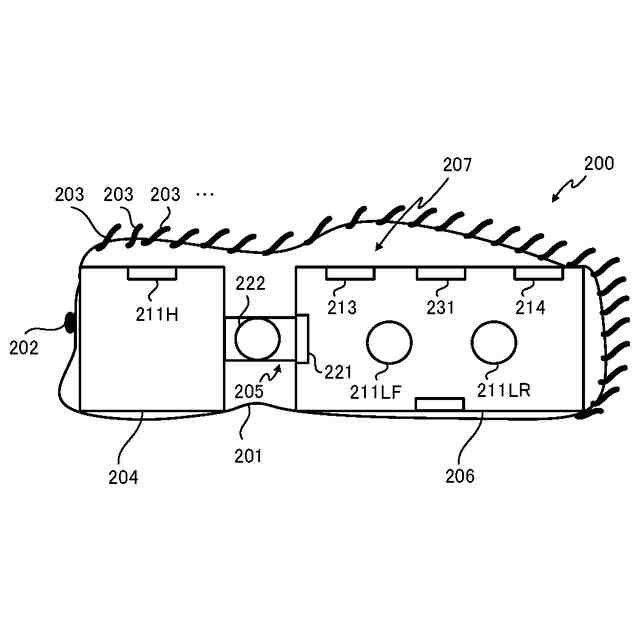
実施形態に係るロボットの側面から見た断面図である。
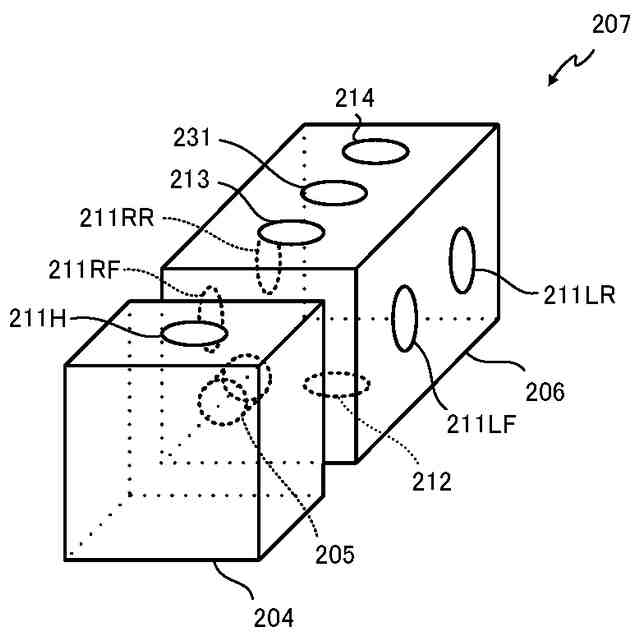
実施形態に係るロボットの筐体を説明する図である。
実施形態に係るロボットの機能構成を示すブロック図である。
実施形態に係るロボットの姿勢の種類を説明する図である。
実施形態に係る音声による懐き動作の一例を説明する図である。
実施形態に係る撫で方による懐き動作の一例を説明する図である。
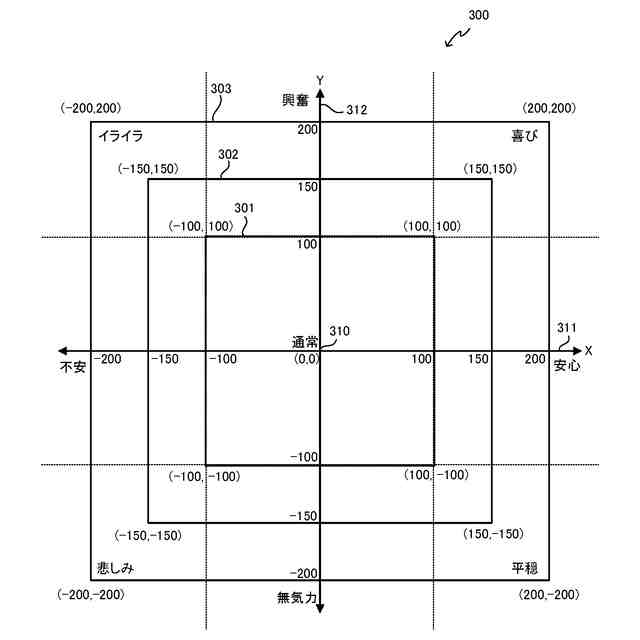
実施形態に係る感情マップの一例を説明する図である。
実施形態に係る性格値レーダーチャートの一例を説明する図である。
実施形態に係る成長テーブルの一例を説明する図である。
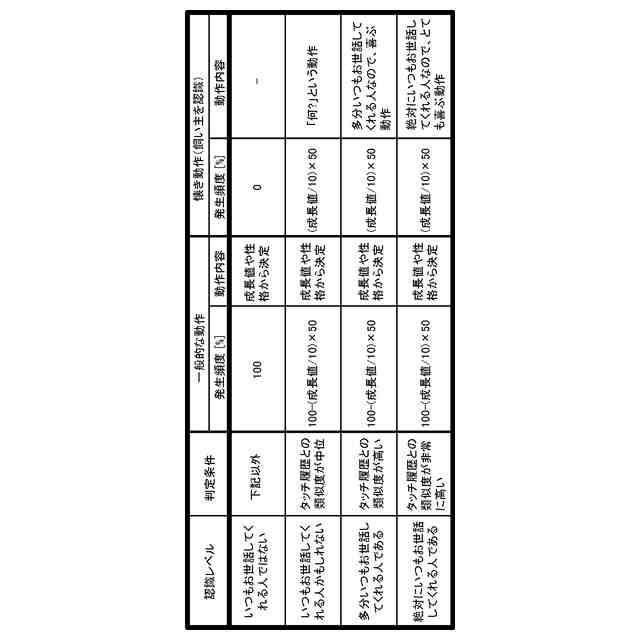
実施形態に係る動作内容テーブルの一例を説明する図である。
実施形態に係る動作制御処理のフローチャートである。
実施形態に係るマイク入力処理のフローチャートである。
実施形態に係る音声特徴パラメータ算出処理のフローチャートである。
実施形態に係る音声履歴との類似度判定処理のフローチャートである。
実施形態に係るタッチ入力処理のフローチャートである。
実施形態に係るタッチ履歴との類似度判定処理のフローチャートである。
実施形態に係る音声応答処理のフローチャートである。
実施形態に係るタッチ応答処理のフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について、図面を参照して説明する。なお、図中同一又は相当部分には同一符号を付す。
【0010】
(実施形態)
図1に示すように、実施形態に係るロボット200は、小型の動物を模したペットロボットであり、目を模した装飾部品202及びふさふさの毛203を備えた外装201に覆われている。また、外装201の中には、ロボット200の筐体207が収納されている。図2に示すように、ロボット200の筐体207は、頭部204、連結部205及び胴体部206で構成され、頭部204と胴体部206とが連結部205で連結されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
フィギュア
2日前
個人
運動補助具
6か月前
個人
球技用ベース
2か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
3か月前
株式会社三共
遊技機
5か月前
株式会社三共
遊技機
5か月前
株式会社三共
遊技機
5か月前
株式会社三共
遊技機
5か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
5か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
5か月前
株式会社三共
遊技機
5か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
3か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ