TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024059046
公報種別
公開特許公報(A)
公開日
2024-04-30
出願番号
2022166557
出願日
2022-10-17
発明の名称
羽ばたき装置
出願人
株式会社中北製作所
代理人
個人
主分類
B64C
33/02 20060101AFI20240422BHJP(航空機;飛行;宇宙工学)
要約
【課題】小型で高機動力が得られる羽ばたき装置を提供する。
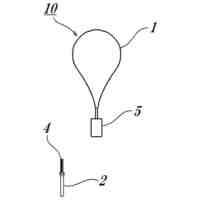
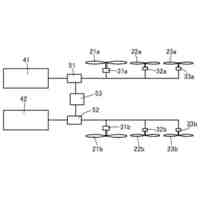
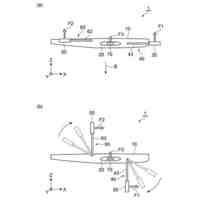
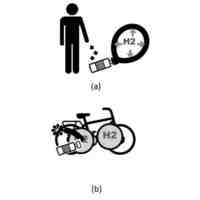
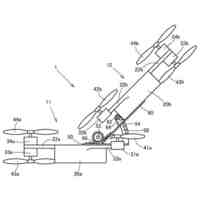
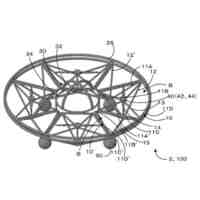
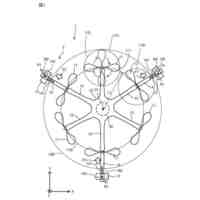
【解決手段】羽ばたき装置1は、羽根2と、羽根2に対応して設けられた一対の駆動部3とを有し、駆動部3は、第1駆動源30Uと、第2駆動源30Dと、第1駆動源30Uにより第1回動軸線周りに回動する第1従動部10Uと、第2駆動源30Dにより第2回動軸線周りに回動する第2従動部10Dと、第1従動部10Uの回動方向とは逆に第1従動部10Uを付勢する第1付勢部材40Uと、第2従動部10Dの回動方向とは逆に第2従動部10Dを付勢する第2付勢部材40Dと、制御部60とを備える。羽根2は、第1従動部10Uに接続され、第1回動軸線に交差する第3回動軸線周りに回動可能な第1羽根軸20と、第2従動部10Dに接続され、第2回動軸線に交差する第4回動軸線周りに回動可能な第2羽根軸21と、羽根本体22とを有する。
【選択図】図1
特許請求の範囲
【請求項1】
一対の羽根と、
一対の前記羽根のそれぞれに対応して設けられた一対の駆動部と、
を有し、
前記駆動部は、
第1駆動源と、
第2駆動源と、
前記第1駆動源から出力された動力を受けて第1回動軸線周りに回動する第1従動部と、
前記第2駆動源から出力される動力を受けて第2回動軸線周りに回動する第2従動部と、
前記第1従動部の回動に伴って、前記第1従動部の回動方向とは逆方向への付勢力を前記第1従動部に対して付与する第1付勢部材と、
前記第2従動部の回動に伴って、前記第2従動部の回動方向とは逆方向への付勢力を前記第2従動部に対して付与する第2付勢部材と、
前記第1駆動源及び前記第2駆動源による駆動力の出力制御を行う制御部と、
を備えたものであり、
前記羽根は、
所定の軸線方向に延びると共に、一端側において前記第1従動部に対して接続され、前記第1回動軸線に対して交差する第3回動軸線周り方向に回動可能に接続された第1羽根軸と、
前記第1羽根軸に対して交差する方向に延びると共に、一端側において前記第2従動部に対して接続され、前記第2回動軸線に対して交差する第4回動軸線周り方向に回動可能に接続された第2羽根軸と、
前記第1羽根軸及び前記第2羽根軸に亘って設けられた羽根本体と、
を有するものであること、
を特徴とする羽ばたき装置。
続きを表示(約 2,300 文字)
【請求項2】
一対の羽根と、
一対の前記羽根のそれぞれに対応して設けられた一対の駆動部と、
を有し、
前記駆動部は、
第1駆動源と、
第2駆動源と、
前記第1駆動源から出力された動力を受けて第1回動軸線周りに回動する第1従動部と、
前記第2駆動源から出力される動力を受けて第2回動軸線周りに回動する第2従動部と、
前記第1従動部の回動に伴って、前記第1従動部の回動方向とは逆方向への付勢力を前記第1従動部に対して付与する第1付勢部材と、
前記第2従動部の回動に伴って、前記第2従動部の回動方向とは逆方向への付勢力を前記第2従動部に対して付与する第2付勢部材と、
前記第1駆動源及び前記第2駆動源による駆動力の出力制御を行う制御部と、
を備えたものであり、
前記羽根は、
所定の軸線方向に延びると共に、一端側において前記第1従動部に対して接続され、前記第1回動軸線に対して交差する第3回動軸線周り方向に回動可能に接続された第1羽根軸と、
前記第1羽根軸に対して交差する方向に延びると共に、一端側において前記第2従動部に対して接続され、前記第2回動軸線に対して交差する第4回動軸線周り方向に回動可能に接続された第2羽根軸と、
前記第1羽根軸及び前記第2羽根軸に亘って設けられた羽根本体と、
を有するものであり、
前記第1付勢部材は、
一端側において前記第1従動部に対して接続され、他端側において前記第1羽根軸に対して直接的又は間接的に接続されており、
前記第2付勢部材は、
一端側において前記第2従動部に対して接続され、他端側において前記第2羽根軸に対して直接的又は間接的に接続されていること、
を特徴とする羽ばたき装置。
【請求項3】
一端側において前記第2回動軸線に対して交差する第5軸線周り方向に回動可能なように前記第2従動部に接続されたリンク部材を有しており、
前記リンク部材は、
他端側が前記第2羽根軸に向けて延びるように形成されると共に、前記第4回動軸線周り方向に回動可能に前記第2羽根軸が接続されていること、
を特徴とする請求項1又は2に記載の羽ばたき装置。
【請求項4】
前記第1駆動源及び前記第2駆動源が、DCモータにおけるアウトランナーモータで構成されていること、を特徴とする請求項1又は2に記載の羽ばたき装置。
【請求項5】
前記制御部は、
前記第1駆動源及び前記第2駆動源の正転又は逆転の切り替えにおいて前記第1駆動源及び前記第2駆動源の回転数がゼロとなる所定時間前に前記第1駆動源及び前記第2駆動源の駆動力の出力を停止させる制御を行うと共に、前記第1付勢部材及び前記第2付勢部材の復元力により、前記羽根における往動又は復動が切り替わった時点で、前記第1駆動源及び前記第2駆動源による駆動力の出力を再開させる制御を行うこと、を特徴とする請求項1又は2に記載の羽ばたき装置。
【請求項6】
前記制御部は、
前記第1付勢部材の振幅中心を、前記第1回動軸線周りの一方側又は他方側に所定量でオフセットする第1オフセット制御と、
前記第2付勢部材の振幅中心を、前記第2回動軸線周りの一方側又は他方側に所定量でオフセットする第2オフセット制御と、
を実行可能であり、
前記第1オフセット制御及び前記第2オフセット制御は、前記第1駆動源及び前記第2駆動源における駆動電圧波形に所定量のオフセットを付与することで実行されること、を特徴とする請求項1又は2に記載の羽ばたき装置。
【請求項7】
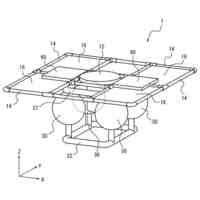
前記一対の駆動部を支持する躯体を有しており、
前記第1従動部の回動に伴って、前記第1従動部の回動方向とは逆方向への付勢力を前記第1従動部に対して付与する第3付勢部材と、
前記第2従動部の回動に伴って、前記第2従動部の回動方向とは逆方向への付勢力を前記第2従動部に対して付与する第4付勢部材と、
を有しており、
前記第3付勢部材は、
一端側において前記躯体に対して接続されると共に、他端側において、前記第1羽根軸に直接的又は間接的に接続されており、
前記第4付勢部材は、
一端側において前記躯体に対して接続されると共に、他端側において、前記第2羽根軸に直接的又は間接的に接続されており、
前記第3付勢部材及び前記第4付勢部材は、前記第1付勢部材及び前記第2付勢部材における付勢力よりも小さい付勢力を発揮可能、かつ、前記第1付勢部材及び前記第2付勢部材における振幅中心を基準位置に戻すことが可能な付勢力を発揮可能に形成されていること、を特徴とする請求項2に記載の羽ばたき装置。
【請求項8】
前記制御部は、前記羽根が、進行方向に対して反対方向に所定の角度で傾斜するように前記第1駆動源及び前記第2駆動源における出力の位相に差を設ける制御を行うこと、を特徴とする請求項1又は2に記載の羽ばたき装置。
【請求項9】
前記一対の駆動部を支持する躯体を有しており、
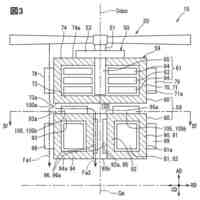
前記躯体は、間隔を空けて配された一対の支持部を有しており、
前記第1駆動源及び前記第2駆動源が、前記一対の支持部の外側に配されており、
前記第1付勢部材、前記第2付勢部材、前記第1従動部、及び前記第2従動部が、前記一対の支持部の間に配されていること、を特徴とする請求項1又は2に記載の羽ばたき装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、羽根を揺動させることによって浮上力を得る羽ばたき装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
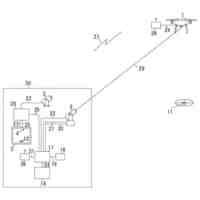
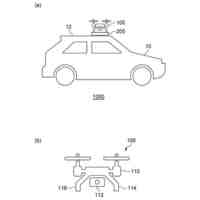
従来、上空からの監視、撮影、各種の点検等に羽ばたき装置が利用されている。上述した羽ばたき装置として、DCモータにより、直接的に羽ばたき翼(羽根に相当)を駆動する羽ばたき翼超小型飛行機システム(以下、単に羽ばたき装置と称する)が知られている。DCモータは小型化に伴い設計上高いトルクを出す事が困難になること、及び高速回転(概ね無負荷回転数の70~85%)領域において電気-機械エネルギー変換効率(以後、単に効率と称する)がピークを取る事から、リンク機構を用いて一方向回転運動を往復回動運動に変換して羽根を羽ばたかせる羽ばたき機構が多く用いられてきた。一方で近年、昆虫などの生体の羽ばたきにおいて共振現象を用いた羽ばたきストロークの拡大機構が用いられている事が見いだされ、この知見を利用して、トーションバネにより共振系を構築する事で、トルクが小さい小型のDCモータを用いた構成でもスタンドアロン浮上が可能な機体が実現されている(例えば、特許文献1)。
【0003】
上述した特許文献1に記載の羽ばたき装置は、トーションバネに接続されたDCモータを駆動することで羽根を直接駆動するものとされている。また、上述した特許文献1に記載の羽ばたき装置は、DCモータを往復回動運動することで、当該トーションバネの復元力と、システム全体(羽根、駆動力伝達系、上記DCモータのロータ)の慣性力にて構成されるバネ-マス系を加振しているものと考えられる。このDCモータの加振周波数が、上記バネ-マス系の固有振動数(2*π*√(K/I)、但しKは当該トーションバネのバネ定数、Iは上記システム全体の回転慣性)に等しいとき、モータの駆動効率が最大となり、また羽ばたき振幅、及び浮上力も最大となることが上記特許文献1により示されている。すなわち当該構成においては上記バネ-マス系の固有振動数近傍に羽ばたき周波数を設定することが浮上に有利である。このため、羽根の質量が大きいケースや、モータのロータの回転慣性が大きい場合、おのずとバネ定数の高いトーションバネを用いることとなる。
【先行技術文献】
【特許文献】
【0004】
米国特許出願公開第2016/159477号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、近年、羽ばたき装置の利用の多様化に伴い、小型で高機動力の羽ばたき装置が求められている。しかしながら、上述した特許文献1に記載の羽ばたき装置は、羽根の駆動が1自由度で構成されており、例えば羽根の迎え角をストロークと独立して変更する事はできず、高精細な羽根の駆動を行うことが困難であった。また、上述した特許文献1に記載の羽ばたき装置は、例えば、左右の羽根の運動の差を大きくするような場合(大きな姿勢制御トルクを発生させる場合)にモータの出力を高める必要があった。
【0006】
また、羽ばたき装置の高機動力化にあたり、モータの容量を大きくすることが考えられるが、羽ばたき装置の大型化や、コスト増大の懸念があった。また、モータの大容量化に代えて、トーションバネのバネ定数を上げて、羽ばたきに係る周波数を高めることが考えられる。しかしながら、上述した特許文献1に記載の羽ばたき装置は、トーションバネのバネ定数を大きくした場合、ヨー方向への運動に影響を及ぼす懸念や羽根のストロークを確保しにくくなる懸念があった。
【0007】
そこで、本発明は、小型で高機動力が得られる羽ばたき装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
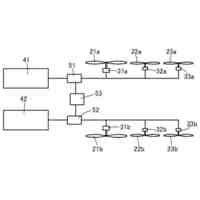
(1)上述した課題を解決すべく提供される本発明の羽ばたき装置は、一対の羽根と、一対の前記羽根のそれぞれに対応して設けられた一対の駆動部と、を有し、前記駆動部は、第1駆動源と、第2駆動源と、前記第1駆動源から出力された動力を受けて第1回動軸線周りに回動する第1従動部と、前記第2駆動源から出力される動力を受けて第2回動軸線周りに回動する第2従動部と、前記第1従動部の回動に伴って、前記第1従動部の回動方向とは逆方向への付勢力を前記第1従動部に対して付与する第1付勢部材と、前記第2従動部の回動に伴って、前記第2従動部の回動方向とは逆方向への付勢力を前記第2従動部に対して付与する第2付勢部材と、前記第1駆動源及び前記第2駆動源による駆動力の出力制御を行う制御部と、を備えたものであり、前記羽根は、所定の軸線方向に延びると共に、一端側において前記第1従動部に対して接続され、前記第1回動軸線に対して交差する第3回動軸線周り方向に回動可能に接続された第1羽根軸と、前記第1羽根軸に対して交差する方向に延びると共に、一端側において前記第2従動部に対して接続され、前記第2回動軸線に対して交差する第4回動軸線周り方向に回動可能に接続された第2羽根軸と、前記第1羽根軸及び前記第2羽根軸に亘って設けられた羽根本体と、を有するものであること、を特徴とするものである。
【0009】
上述した羽ばたき装置は、第1羽根軸が、第1駆動源により駆動され、第2羽根軸が、第2駆動源により駆動される。すなわち、羽根は、第1駆動源及び第2駆動源の双方により駆動され、第一駆動源の回転角により羽のストローク角が、第1駆動源と第2駆動源の回転角の差により羽の迎え角として規定される。これにより、上述した羽ばたき装置は、ストロークと迎え角を個別に制御する事が可能となり、姿勢を保ったまま水平方向に移動する等の、より機動力が高い飛行が可能になる。
【0010】
ここで、第1駆動源及び第2駆動源(単に、両者を併せて駆動源とも称する)には、各種のモータ等が利用できるが、正逆転が容易でありパワーウェイトレシオの高いブラシレスDCモータが好ましく利用できる。これにより、バッテリ駆動が容易になり、制御も容易に行うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行体
2か月前
個人
ドローン係留装置
4か月前
個人
空港用貨物搬送車
10日前
個人
ドローンの計測飛行方法
7か月前
個人
マルチコプター型電気飛行機
1か月前
個人
人工衛星推進材循環エンジン
1か月前
個人
自由落下運航システム
2か月前
個人
マルチコプター
11か月前
合同会社アドエア
飛行体落下補助装置
4か月前
合同会社アドエア
飛行体落下補助装置
9か月前
株式会社中北製作所
羽ばたき装置
1か月前
株式会社FINEMECH
回転翼航空機
11か月前
個人
転落・墜落時事故防止用エアバッグ
12か月前
個人
飛行体
4か月前
株式会社SUBARU
電動航空機
22日前
株式会社FINEMECH
回転翼航空機
11か月前
河村電器産業株式会社
設備点検システム
6か月前
株式会社中北製作所
羽ばたき装置
12日前
中国電力株式会社
物資運搬ドローン
9か月前
株式会社SUBARU
回転翼航空機
19日前
国立大学法人九州大学
飛行体
2か月前
CAPXLE株式会社
緊急避難用気球
6か月前
CAPXLE株式会社
緊急避難用気球
6か月前
SkyDeer株式会社
衛星制御方法
2か月前
京セラ株式会社
発着装置
7か月前
CAPXLE株式会社
緊急避難用気球
6か月前
株式会社FINEMECH
連結型回転翼航空機
6か月前
株式会社デンソー
推進装置
4か月前
個人
ドローン
9か月前
株式会社JVCケンウッド
撮像システム
7か月前
株式会社エムアイエー
機体フレーム
4か月前
トヨタ自動車株式会社
飛行体
8か月前
株式会社FINEMECH
回転翼の可変ピッチ機構
7か月前
学校法人立命館
飛行体及び飛行体の駆動装置
1か月前
株式会社デンソー
電池システム
2日前
日鉄テクノロジー株式会社
ドローン測定装置
6か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ