TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024057741
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022164601
出願日
2022-10-13
発明の名称
移動量計測システム
出願人
株式会社小野測器
代理人
個人
主分類
G06T
7/60 20170101AFI20240418BHJP(計算;計数)
要約
【課題】対象体に対して相対的に移動するカメラで撮影した画像中の、先行する画像中の特定領域に類似する領域の探索を速やかに行う。
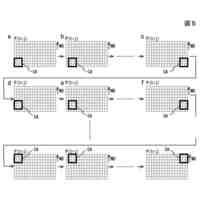
【解決手段】対象体を撮影した撮影画像の各行の画素データを行の並び順に順次出力する第1カメラ21を設ける。第1カメラ21の対象体に対する標準的な相対的移動方向と反対の方向を反相対的移動方向として、第1カメラ21は、個々の撮影画像について当該第1カメラ21が、より前に出力する行が表す対象体の部分が、対象体の、より反相対的移動方向側の部分となる向きで配置する。画像P中の被追尾領域Aと同じサイズの各領域は、当該領域内の画素データが第1カメラ21から出力されしだい相関算出領域CAに設定され、被追尾領域Aとの相関が算出され、算出した相関に基づいて被追尾領域Aに対応する領域が追尾結果領域Bとして算定される。
【選択図】図5
特許請求の範囲
【請求項1】
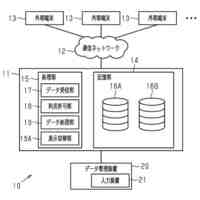
画像の行の並び順に順次各行の画素データを出力するカメラで撮影した対象体の画像である撮影画像から、前記対象体に対する前記カメラの相対的移動量を計測する移動量計測システムであって、
前記カメラの対象体に対する標準的な相対的移動方向と反対の方向を反相対的移動方向として、前記カメラは、個々の前記撮影画像について、当該カメラが、より前に出力する行が表す対象体の部分が、対象体の、より反相対的移動方向側の部分となる向きで配置されており、
当該移動量計測システムは、
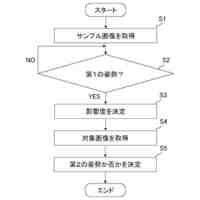
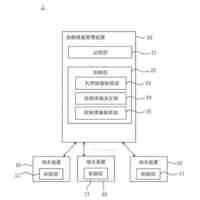
計測の各回において、今回の前記撮影画像中に、被追尾領域を設定する被追尾領域設定手段と、
計測の各回において、前回に前記被追尾領域設定手段が設定した被追尾領域である対象被追尾領域にマッチする今回の前記撮影画像中の領域を、追尾結果領域として探索する探索手段と、
計測の各回において、前記対象被追尾領域から今回、前記探索手段が探索した前記追尾結果領域への移動量である画像上移動量を算出する画像上移動量算定手段とを有し、
前記探索手段には、前記撮影画像の画素データが前記カメラからの出力順に入力され、当該探索手段は、前記対象被追尾領域と同じサイズの今回の撮影画像中の領域を、当該領域に含まれる全ての画素の画素データの入力が完了しだい、相関算出領域に設定して、当該相関算出領域と前記対象被追尾領域との相関の算出を行い、1以上の前記相関算出領域について算出した相関に基づいて前記追尾結果領域を算定することを特徴とする移動量計測システム。
続きを表示(約 1,800 文字)
【請求項2】
請求項1記載の移動量計測システムであって、
前記被追尾領域設定手段は、計測の各回に、今回までに算出した前記画像上移動量に基づいて、次回に算出される画像上移動量を予測し、前記被追尾領域を、当該被追尾領域を予測した画像上移動量移動した領域が、前記撮影画像の前記カメラから最初に出力される行の近くの領域となるように設定することを特徴とする移動量計測システム。
【請求項3】
請求項2記載の移動量計測システムであって、
前記被追尾領域設定手段は、前記被追尾領域を、当該被追尾領域を前記予測した画像上移動量移動した領域が、前記撮影画像の前記カメラから最初に出力される列の近くの領域となるように設定することを特徴とする移動量計測システム。
【請求項4】
請求項1、2または3記載の移動量計測システムであって、
前記探索手段は、前記相関算出領域と前記対象被追尾領域の相互に対応する位置にある画素間の画素データの差分の絶対値の総和を前記相関として算出すると共に、前記相関算出領域の設定前に、当該相関算出領域の前記カメラから最後に出力される画素以外の当該相関算出領域内の画素と当該画素と相互に対応する位置にある前記対象被追尾領域の画素間の画素データの差分もしくは当該差分の絶対値を、当該相関算出領域内の画素の画素データが前記カメラから出力されたときに事前に算出しておくことを特徴とする移動量計測システム。
【請求項5】
請求項1、2または3記載の移動量計測システムであって、
前記探索手段は、前記相関算出領域と前記対象被追尾領域の相互に対応する位置にある行間の相関から、前記相関算出領域と前記対象被追尾領域の相関を算出すると共に、前記相関算出領域の設定前に、当該相関算出領域の前記カメラから最後に出力される行以外の当該相関算出領域内の行と当該行と相互に対応する位置にある前記対象被追尾領域の行間の相関を、当該相関算出領域内の行内の全ての画素データが前記カメラから出力されたときに事前に算出しておくことを特徴とする移動量計測システム。
【請求項6】
請求項1、2または3記載の移動量計測システムであって、
対象体の画像である第2撮影画像を撮影する、画像の行の並び順に順次各行の画素データを出力する第2カメラを有し、
前記第2カメラは、個々の第2撮影画像について、当該第2カメラが、より前に出力する行が表す対象体の部分が、対象体の、より標準的な相対的移動方向側の部分となる向きで配置されており、
当該移動量計測システムは、
計測の各回において、今回の第2撮影画像中に、第2被追尾領域を設定する第2被追尾領域設定手段と、
計測の各回において、前回に前記第2被追尾領域設定手段が設定した第2被追尾領域である第2対象被追尾領域にマッチする今回の第2撮影画像中の領域を、第2追尾結果領域として探索する第2探索手段と、
計測の各回において、前記第2対象被追尾領域から今回、第2探索手段が探索した第2追尾結果領域への移動量である第2画像上移動量を算出する第2画像上移動量算定手段と、
計測の各回において、前記画像上移動量算定手段が算定した前記画像上移動量と、前記第2画像上移動量算定手段が算定した前記第2画像上移動量の一方を選択的に用いて、前記対象体に対するカメラの相対的移動量を算定する移動量算定手段とを有し、
前記第2探索手段には、前記第2撮影画像の画素データが前記第2カメラからの出力順に入力され、当該第2探索手段は、前記第2対象被追尾領域と同じサイズの今回の第2撮影画像中の領域を、当該領域に含まれる全ての画素の画素データの入力が完了しだい、第2相関算出領域に設定して、当該第2相関算出領域と前記第2対象被追尾領域との相関の算出を行い、1以上の前記第2相関算出領域について算出した相関に基づいて前記第2追尾結果領域を算定することを特徴とする移動量計測システム。
【請求項7】
請求項1、2または3記載の移動量計測システムであって、
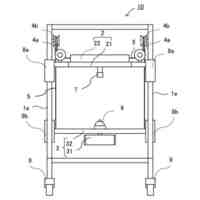
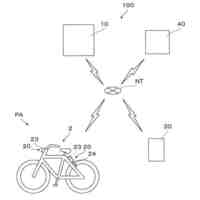
前記カメラは移動体に搭載され、当該移動体が走行する走行面を前記対象体として撮影することを特徴とする移動量計測システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、カメラで対象体を撮影した画像を用いて、カメラと対象体の間の相対的な移動量を測定する技術に関するものである。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
カメラで対象体を撮影した画像を用いて、カメラと対象体の間の相対的な移動量を測定する技術としては、第1の時刻に撮影した第1の画像中の特定領域に類似する、第1の時刻より後の第2の時刻に撮影した第2の画像中の領域を探索し、探索した領域の特定領域からの移動量を実空間の移動量に換算して、カメラと対象体の間の相対的な移動量を算定する技術が知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2020-190458号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の技術によって、カメラと対象体の間の相対的な移動量を測定する場合、特定領域に類似する領域の探索は、少ない処理量で速やかに完了することが、移動量の測定の遅延の抑制や処理量の低減、トラッキングフィードバックの安定性の観点から好ましい。
そこで、本発明は、第1の時刻にカメラに対して相対的に移動する対象体を撮影した画像中の特定領域に類似する、第1の時刻より後の第2の時刻に当該対象体を撮影した画像中の領域の探索を、少ない処理量で速やかに行うことを課題とする。
【課題を解決するための手段】
【0005】
前記課題達成のために、本発明は、画像の行の並び順に順次各行の画素データを出力するカメラで撮影した対象体の画像である撮影画像から、前記対象体に対する前記カメラの相対的移動量を計測する移動量計測システムにおいて、前記カメラの対象体に対する標準的な相対的移動方向と反対の方向を反相対的移動方向として、前記カメラは、個々の前記撮影画像について、当該カメラが、より前に出力する行が表す対象体の部分が、対象体の、より反相対的移動方向側の部分となる向きで配置したものである。また、当該移動量計測システムに、計測の各回において、今回の前記撮影画像中に、被追尾領域を設定する被追尾領域設定手段と、計測の各回において、前回に前記被追尾領域設定手段が設定した被追尾領域である対象被追尾領域にマッチする今回の前記撮影画像中の領域を、追尾結果領域として探索する探索手段と、計測の各回において、前記対象被追尾領域から今回、前記探索手段が探索した前記追尾結果領域への移動量である画像上移動量を算出する画像上移動量算定手段とを備えたものである。前記探索手段には、前記撮影画像の画素データが前記カメラからの出力順に入力される。また、前記探索手段は、前記対象被追尾領域と同じサイズの今回の撮影画像中の領域を、当該領域に含まれる全ての画素の画素データの入力が完了しだい、相関算出領域に設定して、当該相関算出領域と前記対象被追尾領域との相関の算出を行い、1以上の前記相関算出領域について算出した相関に基づいて前記追尾結果領域を算定する。
【0006】
この移動量計測システムは、前記被追尾領域設定手段において、計測の各回に、今回までに算出した前記画像上移動量に基づいて、次回に算出される画像上移動量を予測し、前記被追尾領域を、当該被追尾領域を予測した画像上移動量移動した領域が、前記撮影画像の前記カメラから最初に出力される行の近くの領域となるように設定する構成も好ましい。
【0007】
この場合、前記被追尾領域設定手段は、前記被追尾領域を、当該被追尾領域を予測した画像上移動量移動した領域が、前記撮影画像の前記カメラから最初に出力される列の近くの領域となるように設定してもよい。
また、本移動量計測システムは、前記探索手段において、相関算出領域と前記対象被追尾領域の対応する位置にある画素間の画素データの差分の総和を前記相関として算出すると共に、前記対象被追尾領域の設定前に、当該対象被追尾領域の前記カメラから最後に出力される画素以外の当該対象被追尾領域内の画素と当該画素と対応する位置にある前記対象被追尾領域の画素間の画素データの差分を、当該対象被追尾領域内の画素の画素データが前記カメラから出力された際に事前に算出しておくように構成してもよい。
【0008】
または、移動量計測システムは、前記探索手段において、前記相関算出領域と前記対象被追尾領域の相互に対応する位置にある行間の相関から、前記相関算出領域と前記対象被追尾領域の相関を算出すると共に、前記相関算出領域の設定前に、当該相関算出領域の前記カメラから最後に出力される行以外の当該相関算出領域内の行と当該行と相互に対応する位置にある前記対象被追尾領域の行間の相関を、当該相関算出領域内の行内の全ての画素データが前記カメラから出力されたときに事前に算出してもよい。
【0009】
また、移動量計測システムに、対象体の画像である第2撮影画像を撮影し、画像の行の並び順に順次各行の画素データを出力する第2カメラを設け、当該第2カメラを、個々の第2撮影画像について、当該第2カメラが、より前に出力する行が表す対象体の部分が、対象体の、より標準的な相対的移動方向側の部分となる向きに配置してよい。この場合、移動量計測システムに、計測の各回において、今回の第2撮影画像中に、第2被追尾領域を設定する第2被追尾領域設定手段と、計測の各回において、前回に前記第2被追尾領域設定手段が設定した第2被追尾領域である第2対象被追尾領域にマッチする今回の第2撮影画像中の領域を、第2追尾結果領域として探索する第2探索手段と、計測の各回において、前記第2対象被追尾領域から今回、第2探索手段が探索した第2追尾結果領域への移動量である第2画像上移動量を算出する第2画像上移動量算定手段と、計測の各回において、前記画像上移動量算定手段が算定した前記画像上移動量と、前記第2画像上移動量算定手段が算定した前記第2画像上移動量の一方を選択的に用いて、前記対象体に対するカメラの相対的移動量を算定する移動量算定手段とを設ける。そして、前記第2探索手段に、前記第2撮影画像の画素データが前記第2カメラからの出力順に入力し、当該第2探索手段は、前記第2対象被追尾領域と同じサイズの今回の第2撮影画像中の領域を、当該領域に含まれる全ての画素の画素データの入力が完了しだい、第2相関算出領域に設定して、当該第2相関算出領域と前記第2対象被追尾領域との相関の算出を行い、1以上の前記第2相関算出領域について算出した相関に基づいて前記第2追尾結果領域を算定する。
【0010】
また、移動量計測システムにおいて、前記カメラは移動体に搭載され、当該移動体が走行する走行面を前記対象体として撮影するものでよい。
このような移動量計測システムによれば、撮影画像中の、より前に画素データが出力される領域ほど、より速やかに被追尾領域との相関を算出することができる。
また、カメラは、対象体に対してカメラが、標準的な相対移動方向に移動しているとき、対象体の像が、より後に画素データが出力される行から、より前に画素データが出力される行に向かって流れていく動画を撮影する向きで配置されているので、探索すべき追尾結果領域は、カメラの撮影画像の、最初に画素データが出力される行寄りにある蓋然性が大きい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小野測器
音響校正器
29日前
株式会社小野測器
センサ信号変換器
10日前
株式会社小野測器
移動量計測システム
11日前
個人
乗降調査装置
1か月前
個人
管理装置
22日前
個人
プロジェクター
17日前
個人
暗号化記憶媒体
1日前
日本精機株式会社
投影装置
1か月前
日本精機株式会社
投影システム
1か月前
キヤノン電子株式会社
周辺機器
9日前
個人
求人マッチングサーバ
9日前
17LIVE株式会社
サーバ
1か月前
カゴメ株式会社
営農支援プログラム
8日前
カゴメ株式会社
営農支援プログラム
8日前
カゴメ株式会社
営農支援プログラム
8日前
カゴメ株式会社
営農支援プログラム
8日前
トヨタ自動車株式会社
検査装置
22日前
アスエネ株式会社
水管理の方法
9日前
株式会社ゼロボード
価格決定システム
1か月前
株式会社ワコム
電子ペン
4日前
株式会社ワコム
電子ペン
2日前
CKD株式会社
遠隔支援システム
9日前
株式会社寺岡精工
システム
4日前
株式会社アジラ
姿勢推定システム
1か月前
株式会社NGA
画像投稿システム
22日前
大日本印刷株式会社
作業台
7日前
個人
ポイント増量アプリ「太陽光銭サー」
16日前
株式会社三富
取引管理システム
17日前
日本信号株式会社
自転車貸出システム
1か月前
株式会社小野測器
移動量計測システム
11日前
BH株式会社
商品販売システム
9日前
個人
言語翻訳システム及びプログラム
29日前
株式会社小野測器
移動量計測システム
29日前
トヨタ自動車株式会社
燃料購入システム
1か月前
旭化成株式会社
装置
17日前
日本電気株式会社
端末及び認証システム
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ