TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025181348
公報種別
公開特許公報(A)
公開日
2025-12-11
出願番号
2024089287
出願日
2024-05-31
発明の名称
人力駆動車用の制御装置
出願人
株式会社シマノ
代理人
個人
,
個人
主分類
B62M
25/08 20060101AFI20251204BHJP(鉄道以外の路面車両)
要約
【課題】人力駆動車の姿勢に応じてコンポーネントを好適に制御できる人力駆動車用の制御装置を提供する。
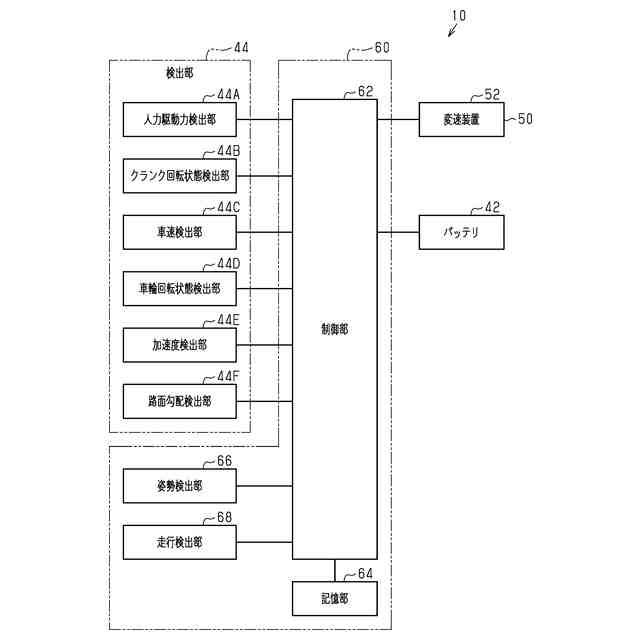
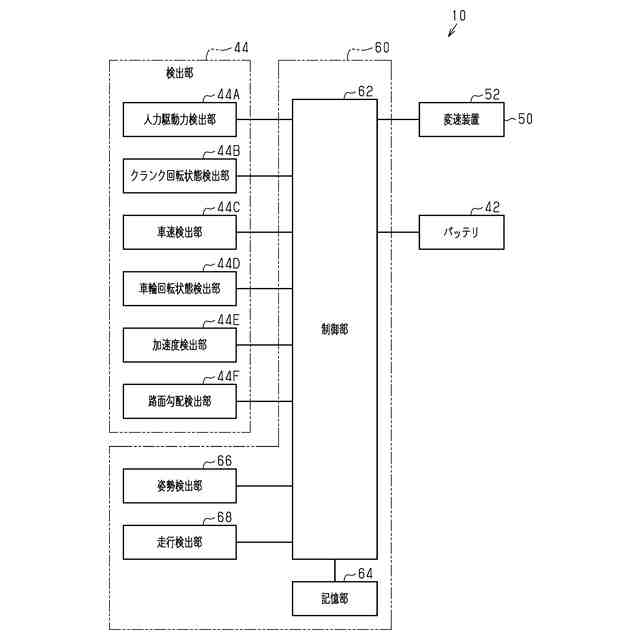
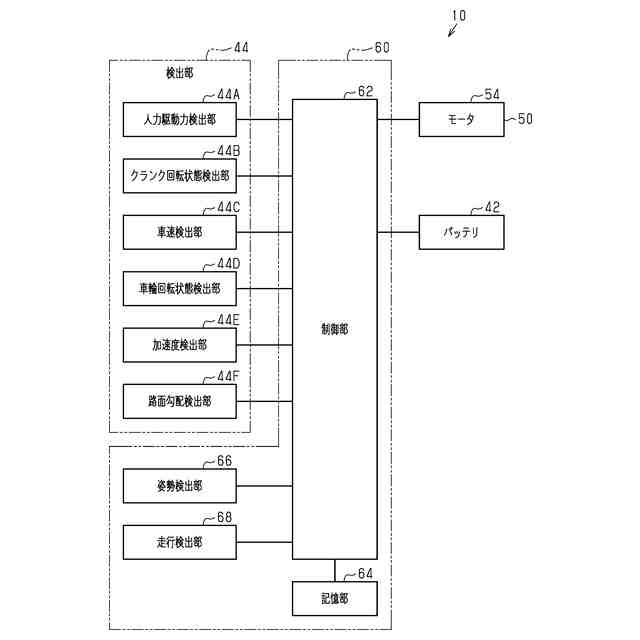
【解決手段】人力駆動車用の制御装置は、所定条件に基づいて人力駆動車用のコンポーネントを制御するように構成される制御部を備え、前記制御部は、前記人力駆動車の姿勢に関する姿勢パラメータに基づいて前記所定条件を変更するように構成され、前記人力駆動車の走行状態が第1走行状態の場合、前記姿勢パラメータに基づいて前記所定条件を変更するように構成され、前記走行状態が前記第1走行状態と異なる第2走行状態の場合、前記姿勢パラメータの変動中心値に基づいて前記所定条件を変更するように構成され、前記第2走行状態は、ライダが立ち漕ぎをしている状態と対応する。
【選択図】図2
特許請求の範囲
【請求項1】
人力駆動車用の制御装置であって、
所定条件に基づいて人力駆動車用のコンポーネントを制御するように構成される制御部を備え、
前記制御部は、
前記人力駆動車の姿勢に関する姿勢パラメータに基づいて前記所定条件を変更するように構成され、
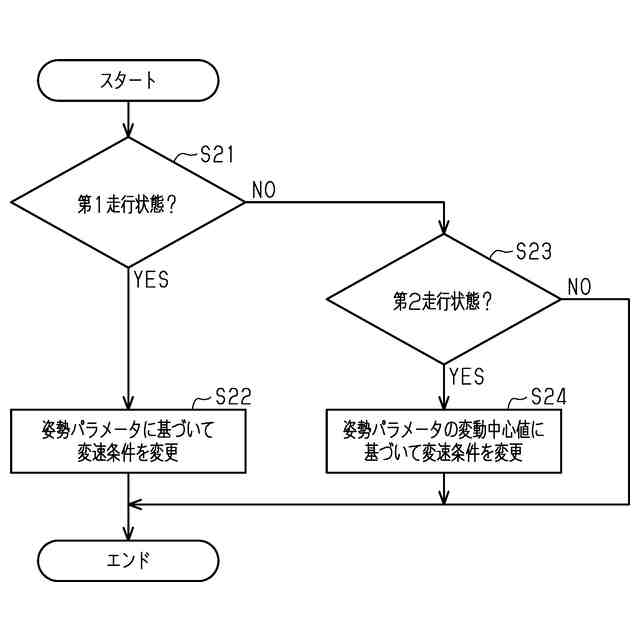
前記人力駆動車の走行状態が第1走行状態の場合、前記姿勢パラメータに基づいて前記所定条件を変更するように構成され、
前記走行状態が前記第1走行状態と異なる第2走行状態の場合、前記姿勢パラメータの変動中心値に基づいて前記所定条件を変更するように構成され、
前記第2走行状態は、ライダが立ち漕ぎをしている状態と対応する、制御装置。
続きを表示(約 1,800 文字)
【請求項2】
前記コンポーネントは、クランク軸の回転速度に対する車輪の回転速度の比率である変速比を変更するように構成される変速装置を含み、
前記所定条件は、前記変速比を変更するための変速条件を含み、
前記変速条件は、前記人力駆動車の走行に関する第1走行パラメータに関し、
前記制御部は、
前記変速条件に基づいて、前記変速比を変更するように前記変速装置を制御するように構成され、
前記走行状態が前記第1走行状態の場合、前記姿勢パラメータに基づいて前記変速条件を変更するように構成され、
前記走行状態が前記第2走行状態の場合、前記変動中心値に基づいて前記変速条件を変更するように構成される、請求項1に記載の制御装置。
【請求項3】
前記変速条件は、前記第1走行パラメータに関する変速閾値によって規定され、
前記制御部は、
前記第1走行パラメータと前記変速閾値との比較に基づいて、前記変速比を変更するように前記変速装置を制御するように構成され、
前記走行状態が前記第1走行状態の場合、前記姿勢パラメータに基づいて前記変速閾値を変更するように構成され、
前記走行状態が前記第2走行状態の場合、前記変動中心値に基づいて前記変速閾値を変更するように構成される、請求項2に記載の制御装置。
【請求項4】
前記コンポーネントは、前記人力駆動車に推進力を付与するモータを含み、
前記所定条件は、前記モータによるアシストレベルを変更するためのアシスト条件を含み、
前記アシスト条件は、前記人力駆動車の走行に関する第2走行パラメータに関し、
前記制御部は、
前記アシスト条件に基づいて、前記アシストレベルを変更するように前記モータを制御するように構成され、
前記走行状態が前記第1走行状態の場合、前記姿勢パラメータに基づいて前記アシスト条件を変更するように構成され、
前記走行状態が前記第2走行状態の場合、前記変動中心値に基づいて前記アシスト条件を変更するように構成される、請求項1に記載の制御装置。
【請求項5】
前記制御部は、前記走行状態が前記第2走行状態に所定期間以上にわたり維持される場合の前記所定期間における複数の時点の前記姿勢パラメータに基づいて前記変動中心値を設定するように構成される、請求項1から4のいずれか一項に記載の制御装置。
【請求項6】
前記制御部は、前記姿勢パラメータの変動周期における所定位相の前記姿勢パラメータと、前記所定期間において前記変動周期における前記所定位相の逆位相の前記姿勢パラメータとに基づいて、前記変動中心値を設定するように構成される、請求項5に記載の制御装置。
【請求項7】
前記制御部は、前記所定期間における前記姿勢パラメータの平均値に基づいて、前記変動中心値を設定するように構成される、請求項5に記載の制御装置。
【請求項8】
前記所定期間は、前記姿勢パラメータの変動周期の1周期と対応する、請求項5に記載の制御装置。
【請求項9】
前記制御部は、前記走行状態が前記第1走行状態から前記第2走行状態に変化した場合における前記姿勢パラメータに基づいて前記変動中心値を設定するように構成される、請求項1から4のいずれか一項に記載の制御装置。
【請求項10】
人力駆動車用の制御装置であって、
所定条件に基づいて人力駆動車用のコンポーネントを制御するように構成される制御部を備え、
前記制御部は、
前記人力駆動車の姿勢に関する姿勢パラメータに基づいて前記所定条件を変更するように構成され、
前記人力駆動車の走行状態が第1走行状態の場合、前記姿勢パラメータに基づいて前記所定条件を変更するように構成され、
前記走行状態が前記第1走行状態と異なる第2走行状態の場合、前記姿勢パラメータの変動中心値に基づいて前記所定条件を変更するように構成され、
前記姿勢パラメータの変動周期における所定位相の前記姿勢パラメータと、前記変動周期における前記所定位相の逆位相の前記姿勢パラメータとに基づいて、前記変動中心値を設定するように構成される、制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、人力駆動車用の制御装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特許文献1は、傾斜角度に応じてコンポーネントを制御するための条件を変更する人力駆動車用の制御装置を備える。
【先行技術文献】
【特許文献】
【0003】
特開2023-067251号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示の目的の1つは、人力駆動車の姿勢に応じてコンポーネントを好適に制御できる人力駆動車用の制御装置を提供することである。
【課題を解決するための手段】
【0005】
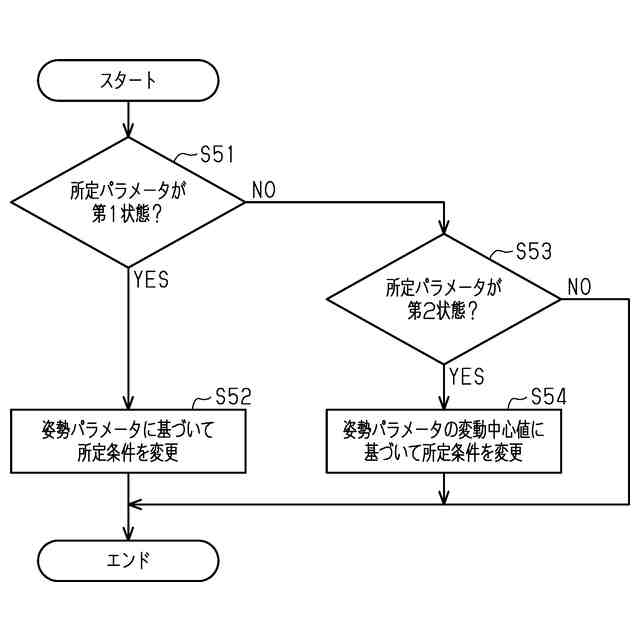
本開示の第1側面に従う制御装置は、人力駆動車用の制御装置であって、所定条件に基づいて人力駆動車用のコンポーネントを制御するように構成される制御部を備え、前記制御部は、前記人力駆動車の姿勢に関する姿勢パラメータに基づいて前記所定条件を変更するように構成され、前記人力駆動車の走行状態が第1走行状態の場合、前記姿勢パラメータに基づいて前記所定条件を変更するように構成され、前記走行状態が前記第1走行状態と異なる第2走行状態の場合、前記姿勢パラメータの変動中心値に基づいて前記所定条件を変更するように構成され、前記第2走行状態は、ライダが立ち漕ぎをしている状態と対応する。
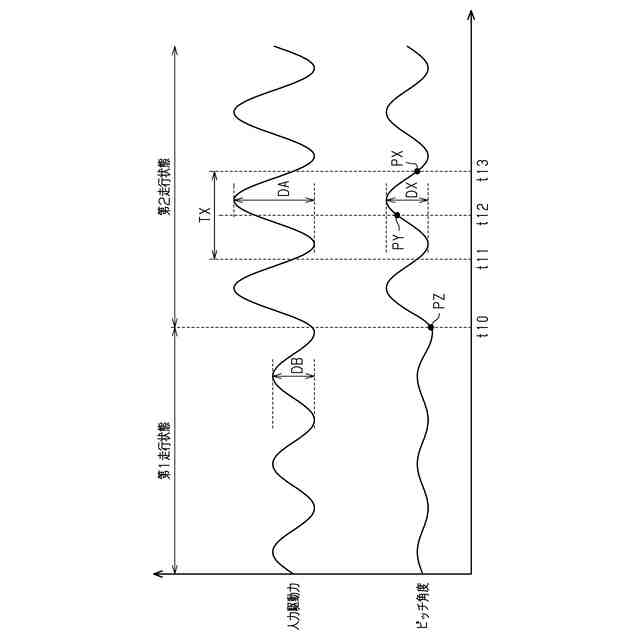
第1側面の制御装置によれば、ライダが立ち漕ぎをしている状態と対応する第2走行状態では、姿勢パラメータの変動中心値に基づいて所定条件を変更するため、ライダの立ち漕ぎによる姿勢パラメータへの影響を低減した値によって所定条件が変更される。したがって、制御部は、姿勢パラメータに応じてコンポーネントを好適に制御できる。
【0006】
本開示の第1側面に従う第2側面の制御装置において、前記コンポーネントは、クランク軸の回転速度に対する車輪の回転速度の比率である変速比を変更するように構成される変速装置を含み、前記所定条件は、前記変速比を変更するための変速条件を含み、前記変速条件は、前記人力駆動車の走行に関する第1走行パラメータに関し、前記制御部は、前記変速条件に基づいて、前記変速比を変更するように前記変速装置を制御するように構成され、前記走行状態が前記第1走行状態の場合、前記姿勢パラメータに基づいて前記変速条件を変更するように構成され、前記走行状態が前記第2走行状態の場合、前記変動中心値に基づいて前記変速条件を変更するように構成される。
第2側面の制御装置によれば、ライダが立ち漕ぎをしている状態と対応する第2走行状態では、姿勢パラメータの変動中心値に基づいて変速条件を変更するため、ライダの立ち漕ぎによる姿勢パラメータへの影響を低減した値によって変速条件を変更できる。したがって、制御部は、姿勢パラメータに応じて変速装置を好適に制御できる。
【0007】
本開示の第2側面に従う第3側面の制御装置において、前記変速条件は、前記第1走行パラメータに関する変速閾値によって規定され、前記制御部は、前記第1走行パラメータと前記変速閾値との比較に基づいて、前記変速比を変更するように前記変速装置を制御するように構成され、前記走行状態が前記第1走行状態の場合、前記姿勢パラメータに基づいて前記変速閾値を変更するように構成され、前記走行状態が前記第2走行状態の場合、前記変動中心値に基づいて前記変速閾値を変更するように構成される。
第3側面の制御装置によれば、変速閾値を変更することによって、変速条件を変更できる。
【0008】
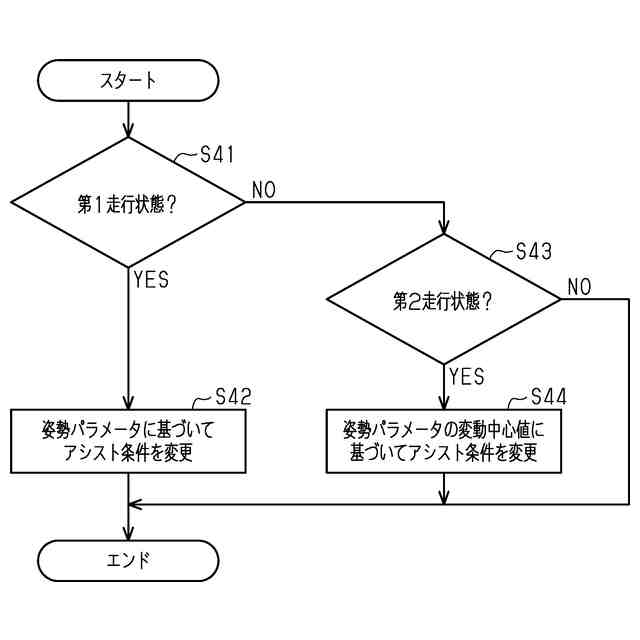
本開示の第1から第3側面のいずれか1つに従う第4側面の制御装置において、前記コンポーネントは、前記人力駆動車に推進力を付与するモータを含み、前記所定条件は、前記モータによるアシストレベルを変更するためのアシスト条件を含み、前記アシスト条件は、前記人力駆動車の走行に関する第2走行パラメータに関し、前記制御部は、前記アシスト条件に基づいて、前記アシストレベルを変更するように前記モータを制御するように構成され、前記走行状態が前記第1走行状態の場合、前記姿勢パラメータに基づいて前記アシスト条件を変更するように構成され、前記走行状態が前記第2走行状態の場合、前記変動中心値に基づいて前記アシスト条件を変更するように構成される。
第4側面の制御装置によれば、ライダが立ち漕ぎをしている状態と対応する第2走行状態では、姿勢パラメータの変動中心値に基づいてアシスト条件を変更するため、ライダの立ち漕ぎによる姿勢パラメータへの影響を低減した値によってアシスト条件を変更できる。したがって、制御部は、姿勢パラメータに応じてモータを好適に制御できる。
【0009】
本開示の第1から第4側面のいずれか1つに従う第5側面の制御装置において、前記制御部は、前記走行状態が前記第2走行状態に所定期間以上にわたり維持される場合の前記所定期間における複数の時点の前記姿勢パラメータに基づいて前記変動中心値を設定するように構成される。
第5側面の制御装置によれば、走行状態が第2走行状態に所定期間以上にわたり維持される場合の所定期間における複数の時点の姿勢パラメータに基づいて変動中心値を好適に設定できる。
【0010】
本開示の第5側面に従う第6側面の制御装置において、前記制御部は、前記姿勢パラメータの変動周期における所定位相の前記姿勢パラメータと、前記所定期間において前記変動周期における前記所定位相の逆位相の前記姿勢パラメータとに基づいて、前記変動中心値を設定するように構成される。
第6側面の制御装置によれば、姿勢パラメータの変動周期における所定位相の姿勢パラメータと、所定期間において変動周期における所定位相の逆位相の姿勢パラメータとに基づいて、変動中心値を好適に設定できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ